



将婴儿体重纳入保温箱的自动温度控制
1 引言
保温箱旨在为新生儿、早产低体重婴儿或患病婴儿提供一个稳定的温度、气流和湿度环境,直到婴儿能够无需外界帮助即可应对外界环境变化,从而消除低体温风险[1]。因此,温度是需要保持最小波动的主要因素。温度值通常由医生设定,并应保持恒定。预设温度值是根据婴儿年龄对应的体表热分布,利用已知的临床实验表格来确定的[1–3]。
保温箱内温度控制主要有两种常见方法。第一种利用婴儿的皮肤温度(Ts),而第二种则采用保温箱内部空气空间的空气温度(Ta)。据报道,使用Ts (即皮肤温度控制)常导致空气温度[4,5]出现较大波动。相比之下,使用Ta(即空气温度控制)会导致皮肤温度波动。此外,在空气温度控制模式下,通常难以将婴儿的核心体温维持在期望范围内[4,5]。
在现代保温箱设计中,医生必须选择空气控制或皮肤控制。这些培养箱不允许同时进行空气和皮肤控制。
文献中报道了各种研究活动。诺贝尔等人得出结论,在产房中将婴儿放入聚氨酯袋可减少低体温的发生[6]。该结果随后被Godfrey等人重复验证,并强调其对临床实践的积极影响[7]。诺贝尔等人在另一项研究中还发现,对于极低出生体重(小于1公斤)的婴儿,腹部温度与足部温度测量之间无显著差异[8]。另一方面,Loring等人研究了早产儿出生后不同沐浴方式的影响[9]。结果显示,采用浸入式沐浴的早产儿在出生后前10分钟内的体温波动较小,而擦浴的早产儿体温波动较大。Lei等人监测了体重为1800–2200克的早产儿在关闭保温箱(即脱离保温箱)后的体温变化。他们得出结论:当婴儿体重达到1800克后,在脱离保温箱期间其体温会下降[10]。
计算机技术也已尝试应用于培养箱[11–15]。2001年,莱昂和奥克斯利测试了使用计算机程序来设定培养箱湿度和空气温度,以替代护士设定的预设值[11],但未得出显著差异。该研究针对的是孕周小于29周的婴儿,且仅限出生后前4天。赫尔德等人重复了类似的研究,但他们覆盖了2周的时间婴儿出生后的观察。他们再次得出结论,计算机程序策略不会影响婴儿恢复出生体重所需的时间[12]。Shin等人成功设计并实现了一个用于监测四台培养箱运行情况的网络服务器和无线计算机网络[13]。此外,巴拉特和尼拉梅甘成功测试了使用现场可编程门阵列(FPGA)来监测保温箱温度的方法。他们得出结论,FPGA在计算速度上比传统的温度监测方法快五倍,且功耗更低[14]。最后,雷迪等人评估了使用模糊逻辑设计混合控制电路的方法,该电路结合了保温箱空气温度和婴儿皮肤温度来控制保温箱的加热[15]。沃贝尔等人回顾了近年来提出的用于描述保温箱等医疗设备中传热机制的计算模型[16]。诺贝尔等人研究了体重为400–1000克、孕龄小于29周的极低出生体重婴儿的心率与体温之间的关系[17]。结果将在第4节中详细讨论。
本文提出了一种新颖的想法。婴儿体重是否对现代保温箱有益?能否设计一种自动控制电路,利用婴儿体重来调节保温箱的温度?换句话说,目的是测试是否可以使用婴儿体重来调节保温箱温度,而不是依赖医生通常设置的预设值。据我们所知,将婴儿体重引入保温箱控制电路的影响尚未被研究。因此,本文首先解释婴儿体重可以转换为电信号,然后用于温控系统。接着,论文阐述了所提出的控制系统以及安装在保温箱外壳中的所需传感器和电路。这包括对湿度、皮肤温度、环境温度以及婴儿体重的监测。最后,给出了结果并进行了讨论。
2 方法
研究中使用了一个保温箱外壳。所选外壳由位于伊利诺伊州芝加哥市的希尔罗马公司制造。外壳的尺寸分别为:长度85.5厘米、宽度46.5厘米、高度48.5厘米。该外壳被带至约旦哈希姆大学的医学仪器实验室。保温箱所用材料为厚度4.5 mm、面积1.515 m²的丙烯酸塑料材料。该材料采用双层结构,两层之间留有空气间隙,以增强热屏蔽效果。
随后,设计并实现了控制电路,并将其配备到保温箱外壳中。
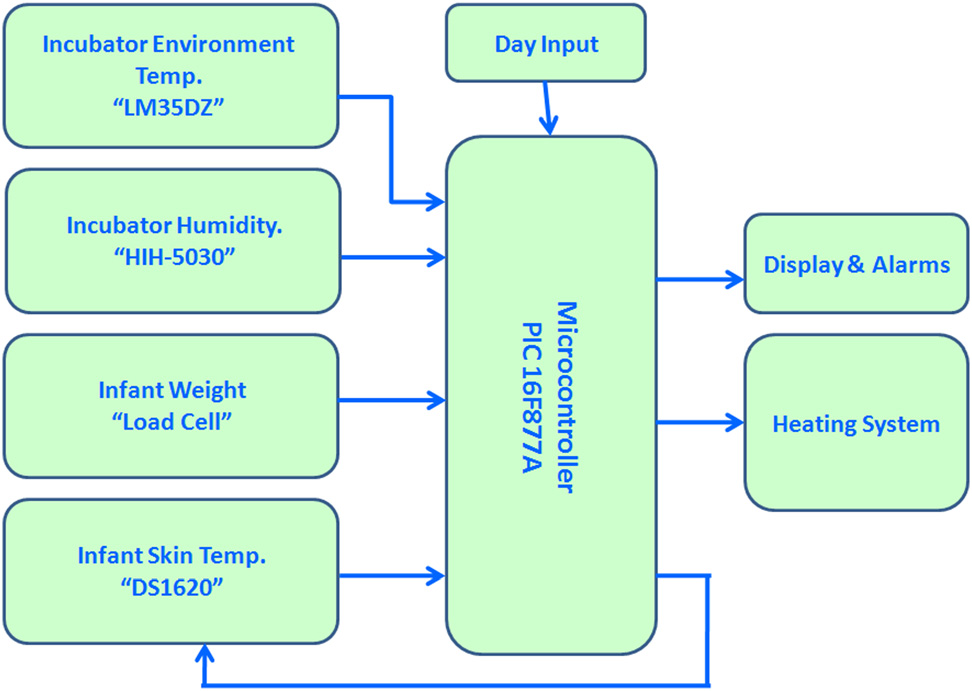
图1展示了所设计的电路的框图。该设计主要包括电传感器、加热器和微控制器。这些部件将在下文进一步详细说明。
2.1 重量感应
本文的目的是研究婴儿体重对温度调节系统的影响。为此使用了应变片式负荷传感器。

图2显示了负荷传感器换能器的顶视图和前视图。它将机械负载(如婴儿体重)转换为电信号。为了获得最大灵敏度,采用四个应变片组成惠斯通电桥电路。该电路将应变片电阻的变化转换为与负载成正比的电信号。
为了校准称重传感器以模拟婴儿体重,观察了在0–3000克范围内以50克间隔施加不同负载(即重量)时电桥电路的输出电压。该数值范围涵盖了早产儿所有可能的体重,而50克间隔对于校准目的而言已足够小。结果表明,电桥电路具有线性特性,精度为每50克0.08 ± 0.001伏特。当体重从0变化到3000克时,电路输出分别在2.89毫伏和7.75毫伏之间变化。电桥电路的输出随后被送入放大器进行放大,以适应后续的电路。放大倍数设置为600倍。称重传感器和应变片电路安装在保温箱内婴儿床垫下方。
2.2 湿度感应
HIH‐5030湿度传感器用于测量保温箱内部的湿度。该传感器是由集成电路传感器制造商霍尼韦尔固态电子中心(新泽西州莫里斯镇)生产的一种传感器。该器件的输出电压与相对湿度(RH)呈线性关系,具有稳定且低漂移的性能。需要输入电压以产生与湿度百分比成正比的输出电压。在3V直流电压、25°C的密闭腔体中,相对湿度每增加1%,输出电压增加0.02V,反之亦然。在本实验中,HIH‐5030连接至3V直流电源。
2.3 温度传感
采用德州仪器(Texas Instrument)位于德克萨斯州达拉斯生产的LM35DZ集成温度传感器系列中的LM35DZ传感器,用于测量培养箱内的环境温度(即目标温度Ta)。LM35DZ的输出电压与摄氏温度呈线性关系(+10mV/°C)。此外,该传感器无需任何外部校准。在室温下其典型精度为±1/4 °C。它可在4–30V电压范围内工作。在本实验中,LM35DZ连接至15V直流电源。
另一方面,DS1620用于测量皮肤温度(即Ts)。它是由位于加利福尼亚州圣何塞的美信集成制造的数字温度计,能够以0.5 °C为间隔测量−55 °C至 +125 °C范围内的温度。此外,在将Ts与两个温度预设值进行比较后,该器件会发出三个警报。这两个预设温度值分别称为“TH”和“TL”。当DS1620的温度(即Ts)小于或等于用户定义的温度TL时,TLOW引脚(即温度过低)将被置为“1”。相反,当Ts大于或等于用户定义的温度TH时,THIGH引脚(即温度过高)将被置为“1”;而只要Ts超过TL,TCOM引脚就会被置为“1”。仅当Ts低于TL时,TCOM才会变为“0”。
2.4 微控制器
可编程接口控制器(PIC)(即微控制器或微芯片)用于管理保温箱中的加热系统。选用微芯科技(亚利桑那州钱德勒)生产的PIC16F877A来设计温度调节电路。PIC的内部结构、输入、输出及设置要求在数据手册中有详细说明。
该PIC能够结合不同的输入参数(例如湿度、Ta、Ts和婴儿体重),执行反馈(例如Ts),并控制设备(例如加热系统),以实现特定的实际功能(例如保温箱温度调节)。该PIC使用“BEGINNER’S ALL‐PURPOSES SYMBOLIC INSTRUCTION CODE (BASIC)”进行编程。该程序使PIC能够在保温箱内进行环境调控,并向加热系统发送开关指令。
2.5 加热系统
任何保温箱都需要一个加热系统来补偿温度损失。通常,加热系统是一个将电能转热能的电阻器。对于本实验中,我们设计了一款与箱体底部连接处和支架相匹配的加热器。
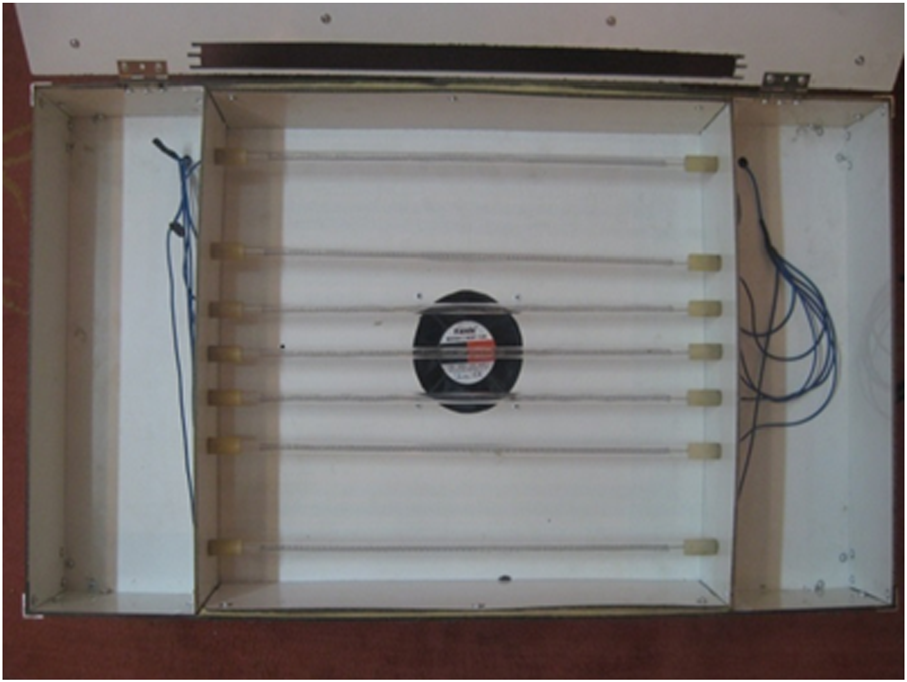
设计的加热系统由七个加热柱组成,如图3所示。每个加热柱是一根直径为5毫米的高阻钨丝,长度为52毫米,功耗为280瓦。每个加热柱通过一个电气开关(即继电器)连接到220伏交流电压电源,该继电器由PIC命令控制。最后,使用了一个风扇进行冷却,该风扇可在高温条件下工作。我们认为,尽管普通保温箱中的加热系统更为复杂,但本加热系统已足以满足本文实验目的。
最后需要说明的是,设计了一个电源,可为传感器和PIC的电源需求提供2伏至15伏之间的稳定直流电源。然而,加热系统则通过继电器直接连接到主电源(即220伏,50赫兹),如上所述。
2.6 实验方法
表1显示了婴儿置于保温箱中时所需的已确定的中性热环境温度限值[18]。这些是最优限值,基于婴儿的年龄和体重。目标是为在无风、均匀温度环境中裸体护理的健康婴儿提供热中性[18]。
| 年龄(天) | 出生体重 ≤1公斤 | 出生体重 ≤2公斤 |
|---|---|---|
| 1 | 35.0–35.5 °C | 34.0–34.6 °C |
| 5 | 34.5–35.0 °C | 33.0–33.8 °C |
| 10 | 34.0–34.6 °C | 32.5–33.5 °C |
| 15 | 33.5–34.4 °C | 32.3–33.3 °C |
| 20 | 33.2–34.2 °C | 32.1–33.2 °C |
表1显示,环境温度需要在出生后每5天调整一次。例如,如果婴儿的体重为1公斤或更轻,则意味着该婴儿在前5、10、15和20天应分别保持在35.0–35.5 °C、34.5–35.0 °C、34.0–34.6 °C、33.5–34.4 °C和33.2–34.2 °C。对于体重在1–2公斤范围内的婴儿,也可得出类似的推断。这些温度范围由护士或医生手动预设。换句话说,医生和护士根据表1中的条件来设置保温箱的环境温度。
我们将表1中的信息以不同的排列方式呈现。新表(即表2)列出了在不同婴儿体重和年龄下应设定的目标温度Ta。
| 婴儿年龄 | 婴儿体重 <1公斤 | 婴儿体重 1–2公斤 |
|---|---|---|
| 婴儿年龄 1–5天 | 35.5 °C | 34.5 °C |
| 婴儿年龄 5–15天 | 34.5 °C | 33.5 °C |
| 婴儿年龄 15–20天 | 33.5 °C | 32.5 °C |
例如,当婴儿年龄为5–15天时,若婴儿体重小于1公斤,Ta应等于34.5 °C;若婴儿体重在1公斤至2公斤之间,则应等于33.5 °C。可以看出,共有四个不同的目标温度值,分别为35.5 °C、34.5 °C、33.5 °C或32.5 °C。
表中的婴儿体重和年龄值在本文中用于回答两个问题。首先,是否可以使用这些限值来设计自动控制电路,以替代护士的干预?其次,持续观察婴儿体重的变化是否有助于调整保温箱的操作参数?
3 项结果
为了回答第2.6节中的第一个问题,设计并构建了一个新电路。电路的框图如图1所示。该图显示,目标温度Ta、Ts、湿度以及称重传感器(即婴儿体重)的信号均被输入到PIC中。此外,婴儿年龄也被作为输入提供给PIC。然后,PIC根据表2中的信息进行编程操作。婴儿年龄由操作员设置(即这是激活系统所需的唯一手动参数),且仅需设置一次。之后,PIC会自动结合婴儿体重和年龄来设定保温箱的目标环境温度(Ta)。
PIC提供四种类型的输出。第一种输出是根据Ta的值向继电器发出命令,以开启或关闭加热系统。第二种输出是向测量Ts的传感器(即DS1620)发送所需控制值TH和TL,如第2.3节所述。第三种输出是在液晶显示器上显示所有传感器的数值。最后一种输出是针对Ta和Ts中任何异常情况的专用声音报警。PIC被编程为从操作员处获取婴儿年龄,以运行电路并提供上述四种输出。
为了评估设计电路(即图1)的性能,针对四种可能的温度范围中的每种情况进行了实验(见第2节2.5中的表1和2)。将一个物理负载放置在保温箱内的称重传感器上,操作员输入婴儿年龄。根据表1和2,我们只有两种负载选项:选择900克代表体重小于1公斤的婴儿情况,1500克代表体重小于2公斤的婴儿情况。然而,婴儿年龄的数值范围为1至20(该系统可轻松扩展以涵盖年龄超过20天的婴儿)。操作员设置婴儿年龄后,我们观察保温箱温度的上升情况,监测其是否达到表1和2中的目标Ta值。通过持续监测Ta值20分钟,并每分钟记录一次其数值(即共20次测量)来完成此过程。目的是检查系统根据负载(即婴儿体重)达到目标温度的效率。
最后需要说明的是,实验均在室温下进行。因此,初始保温箱温度应为22–25 °C(即室温)。这一假设是正确的,因为在将婴儿放入保温箱之前,保温箱通常在室温条件下运行。唯一的例外情况是当婴儿体重小于1公斤且婴儿年龄输入为仅1天时(即目标温度应达到35.0–35.5 °C)。该特定实验开始时,保温箱温度显示约为30 °C。
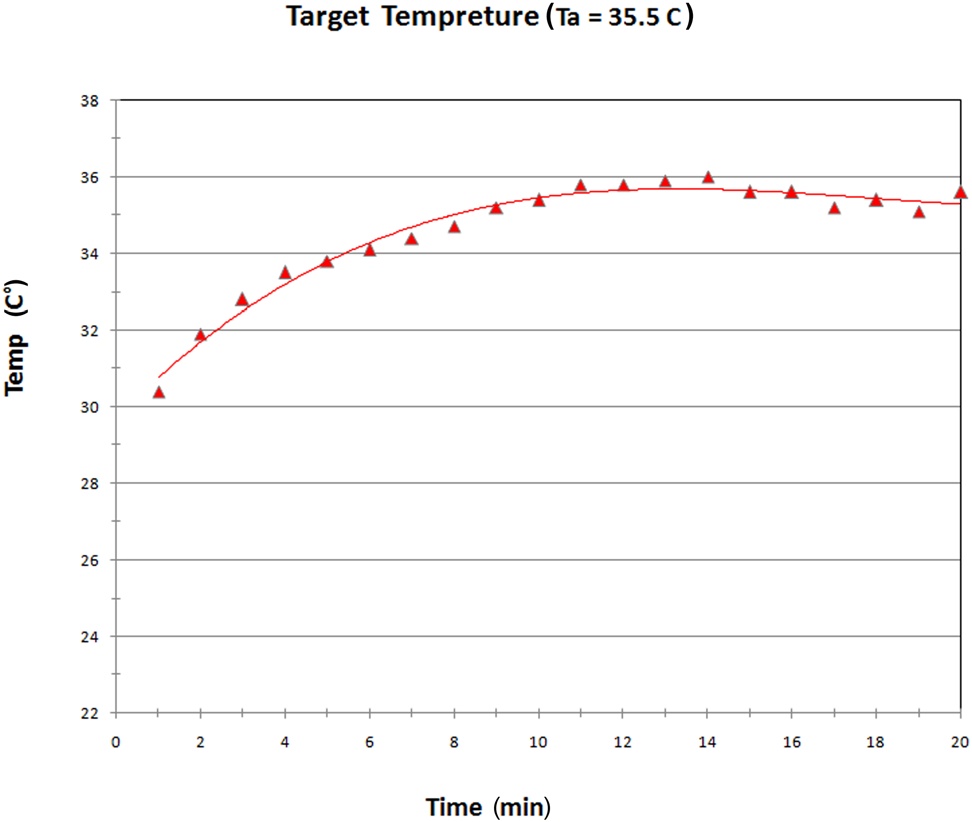
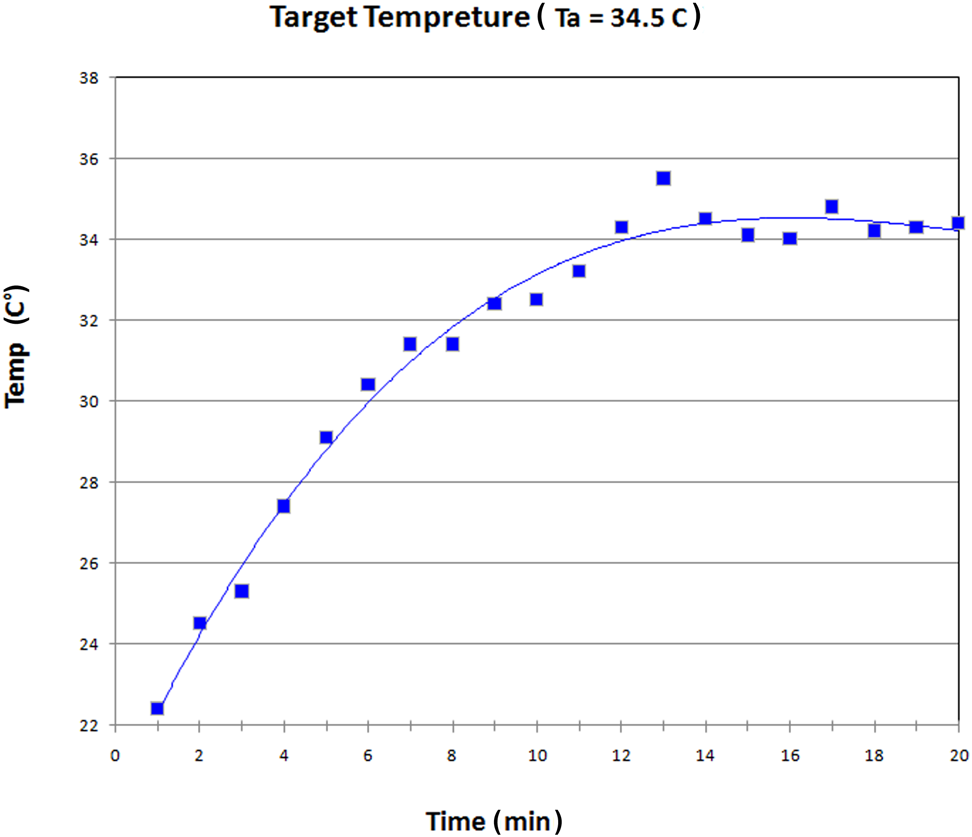
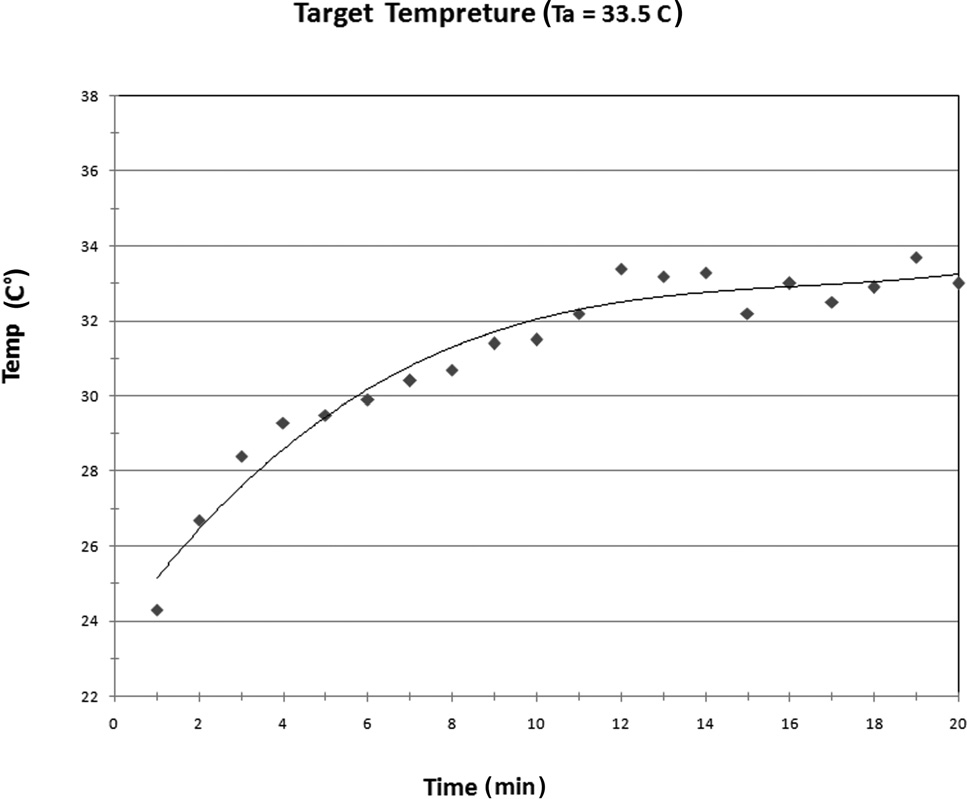
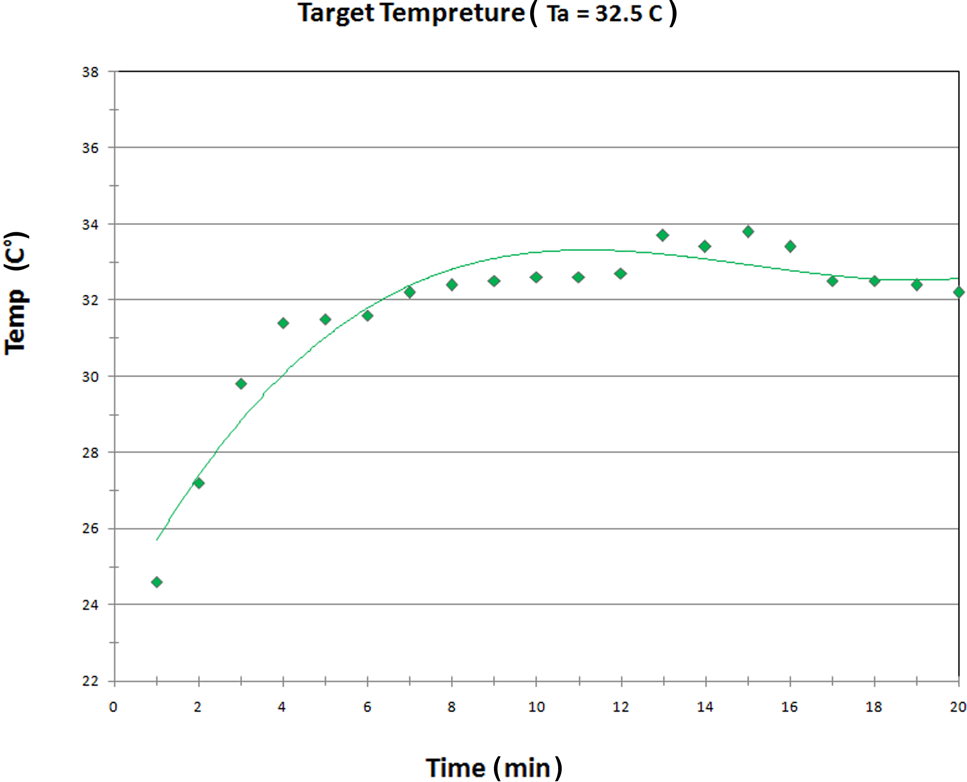
图4–7显示了实验结果。图4说明,当婴儿体重为900克(即小于1公斤)且处于前5天时,设计电路成功将目标温度Ta提升至35.5 °C。当婴儿年龄为5–15天、体重小于1公斤时,如图5所示,设计电路也成功达到了34.5 °C。当婴儿体重为1500克(即小于2公斤),且婴儿年龄设定为1–5天时,我们也获得了类似的结果。另一方面,图6显示了结果(即目标温度Ta为≈33.5 °C),该情况对应婴儿年龄为15–20天、体重小于1公斤,或婴儿年龄为5–15天、体重小于2公斤。最后,图7显示了当目标温度Ta需达到32.5 °C时的结果(即婴儿年龄为15–20天且体重小于2公斤)。图4–7均表明,图2中实现的电路始终成功达到了目标温度。因此,Ta可以通过婴儿体重实现自动控制。换句话说,可将婴儿体重输入加热控制电路,以实现保温箱中的自动热调节。这是本文的第一个目标。
4 讨论
本文的第一个目标是测试将婴儿体重信息引入标准加热控制电路的可行性。该目标通过设计并实现图2中的电路得以实现。PIC已根据表1和2中的信息成功编程。
本文的第二个目标在图4–7中展示结果。所有结果均表明,Ta可根据婴儿的体重和年龄进行有效控制。“X”轴每个数值对应的“Y”轴预测值的标准误差在本实验中被使用(该统计函数记为STEXY)。我们认为STEXY能够准确描述我们的结果,因为室温(即22–24 °C)与目标温度(≥32–35 °C)之间存在显著差异。表3显示了图4–7所示结果在每个时间间隔的目标温度标准误差(即STEXY)。对20分钟实验中所有Ta测量值计算STEXY显示出较高数值(例如,平均STEXY为1.41 °C)。STEXY的这一高值可归因于测量起始于室温(即20–25 °C),而目标Ta温度始终高于30 °C,如表1和2所示。换句话说,加热控制电路从低温(即室温)开始并上升至达到一个较高的温度值(即目标保温箱温度)。
因此,我们重新计算了最后10分钟的STEXY。STEXY值显示有所降低,平均STEXY约为0.48 °C。该误差处于培养箱内可接受的温度波动范围内[1–3]。此外,在本实验中,电路每1分钟记录并调节一次保温箱的温度。我们认为,采用更短的时间间隔(例如每0.5分钟或更短)将由于同时增加测量次数并减少观察热量变化的时间间隔,从而导致更低的STEXY。
最后,需要指出的是,保温箱在维持核心体温于期望范围内的大幅波动(即较大的STEXY)常有发生[1–5]。此外,保温箱的体温调节还取决于保温箱相关参数[6]。本文未涉及婴儿相关参数(如体型大小、成熟度、胎龄、代谢因素以及皮肤和身体发育的成熟度)。然而,保温箱相关参数(如保温箱尺寸、结构形状、壁厚、保温箱床垫材料、保温箱加热方式及控制机制)必然对我们的结果产生了影响。例如,第2.5节所述的加热系统不如新型商用保温箱那样先进。
另一方面,我们注意到在文献中存在其他具有更多体重分类的表格(例如,表4),如参考文献[19]中的表格。表4显示了有五种不同的婴儿体重分类。该特定表格表明,在另一种情况下需要Ta = 31.5 °C。这种情况适用于体重高于2.5 kg且年龄超过4天的婴儿。因此,PIC被编程以包含此情况。
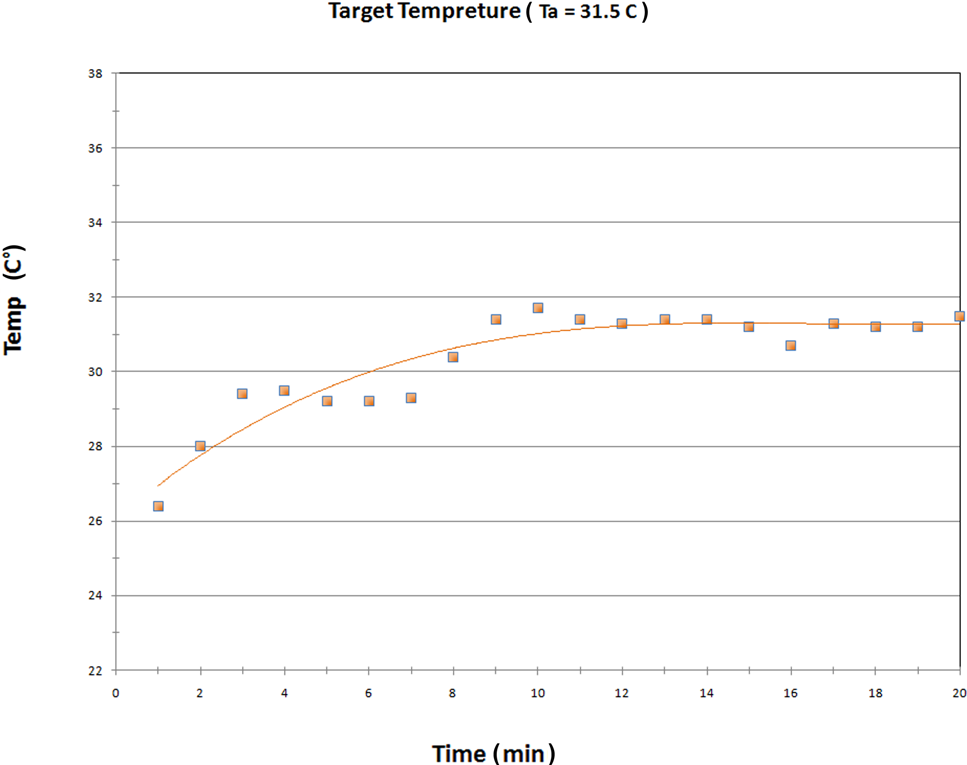
图8显示,电路成功升高了保温箱温度以达到目标Ta值(即31.5 °C)。在最后10分钟监测期间,STEXY为0.23 °C。
| 目标温度 Ta (°C) | STEXY 在首次20分钟(测量时间间隔为1分钟) | STEXY 在最后10分钟(测量时间间隔为1分钟) |
|---|---|---|
| 35.5 | 0.92 | 0.22 |
| 34.5 | 1.85 | 0.61 |
| 33.5 | 1.22 | 0.52 |
| 32.5 | 1.67 | 0.56 |
| 平均值 | 1.41 | 0.48 |
因此,如图4–7所示,我们得出结论:可以将婴儿体重输入加热控制电路,以成功实现保温箱中的自动热调节。这完成了本文的第二个目标。
实现本文两个目标的成功提升了在保温箱的热控制系统中使用婴儿体重的影响。婴儿体重可单独用于设定所需的Ta,也可作为所需Ta的“第二读数”或“第二意见”。这可用作警报,提醒医生注意设置Ta时可能出现的错误(即,婴儿体重可用于监测所需的Ta)。这些结论有望提高培养箱的质量保证水平。据我们所知,这些结论尚未被报道过。
比较图4–8中的结果与文献中类似的研究活动,我们发现这些结果与以下结论高度一致:计算机程序有助于保温箱热量自调节[11,12]。然而,本文表明,婴儿体重可作为保温箱热量自调节的附加参数。由于PIC会使用婴儿体重,因此可以将其添加到计算机网络中[13]。预计PIC技术的速度将与巴拉特和尼拉梅甘所使用的FPGA一样快[14]。这意味着PIC比传统的温度监测具有更快的响应速度。此外,本文的工作支持了雷迪等人得出的结果,即可以设计一种混合控制电路,该电路结合保温箱空气温度Ta和婴儿皮肤温度Ts来控制保温箱的加热[15]。这是因为PIC技术可以被编程以基于Ts和Ta实现热量调节,正如我们在本文中所做的那样。
我们承认,各医疗中心所采用的表1和表4中的数值可能有所不同。例如,诺贝尔等人建议提高体重在400–1000克、孕龄不足29周的极低出生体重婴儿的体温控制点。他们提出将体温设定在36.8至39.9 °C,而不是杜克大学护理学院推荐的36.5 °C(通常由医生设定)[17]。换句话说,我们承认监督早产儿的健康指南可能因国家和医疗中心而异(例如,法国[20], 英国[21], 日本[22], 意大利[23], 美国[24], 加拿大[25], 或印度[26]的最新研究)。然而,这一事实并不影响本文的结论:婴儿体重可被纳入PIC中以辅助或监督体温控制。PIC可以考虑婴儿体重的相关条件,并可根据任何健康指南进行编程。
我们希望更早考虑的一个不足之处是,系统仅在1分钟间隔下测试了20分钟周期。我们认为,这一20分钟周期和1分钟时间间隔足以评估本文的目标,即在培养箱的热调节控制电路中引入婴儿体重的可行性。我们相信,如果延长测试周期并缩短时间间隔,STEXY将会更低。然而,这一观点尚需进一步研究验证。
5 结论
在本文中,婴儿体重被输入到培养箱的温度控制系统中。所提出的PIC系统将在记录婴儿体重的帮助下自动调节培养箱内的环境温度。PIC系统在医生仅设置婴儿年龄后即可自动调节热量。警报会在任何紧急情况下发出信号。因此,自动化成为可能。此外,婴儿体重可作为第二个读数,用于监测医生所需的Ta预设值。这将避免因手动设定温度而可能产生的错误。

















 670
670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









