






概念:
运动规划=路径规划+轨迹规划 路径规划:A点到B点没有障碍的一条路线 轨迹规划:对找到的无障碍路线进行基于运动学和动力学约束的优化(在机器人学上轨迹规划转为行为规划)
物理控制是指将期望的速度和方向转换为车辆的实际转向和加速度的过程
路径规划的算法:基于搜索:Dijkstra,A*,JPS;基于采样的算法:PRM,RRT,RRT*;满足动力学约束的搜索算法’;HyBrid A*;
精密地图相关
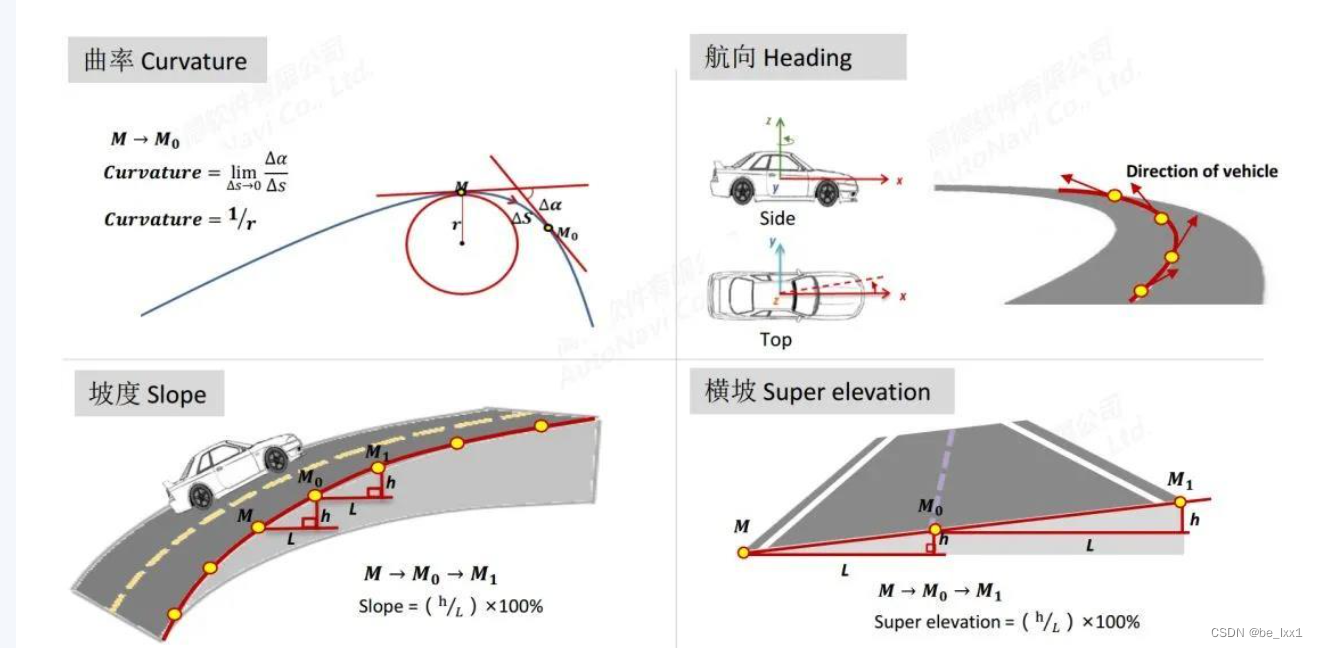
曲率、航向、坡度、横坡
运动规划=路径规划+轨迹规划 路径规划:A点到B点没有障碍的一条路线 轨迹规划:对找到的无障碍路线进行基于运动学和动力学约束的优化(在机器人学上轨迹规划转为行为规划)
物理控制是指将期望的速度和方向转换为车辆的实际转向和加速度的过程
路径规划的算法:基于搜索:Dijkstra,A*,JPS;基于采样的算法:PRM,RRT,RRT*;满足动力学约束的搜索算法’;HyBrid A*;
曲率、航向、坡度、横坡
 2379
2364
2379
2364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























