



. 检查是否安装pkg turtlesim
ros2 pkg executables turtlesim turtlesim draw_square turtlesim mimic turtlesim turtle_teleop_key turtlesim turtlesim_node
1.启动海龟模拟器
ros2 run turtlesim turtlesim_node
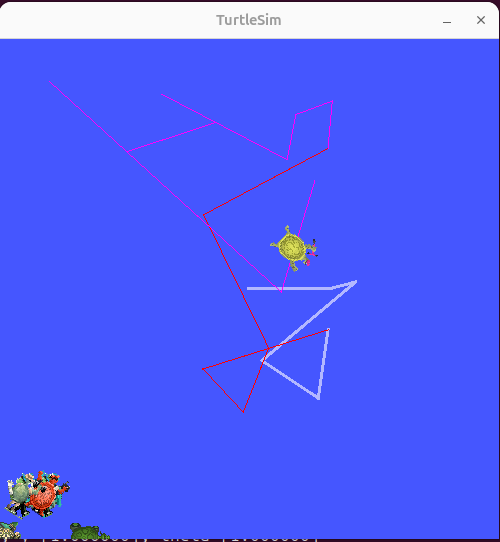
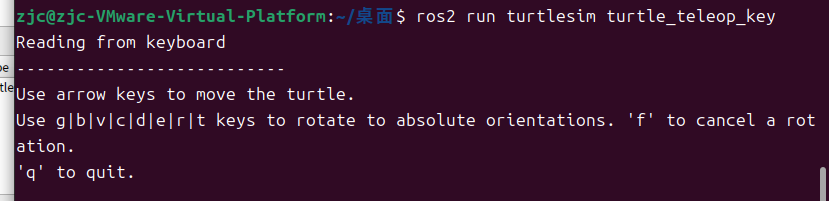
2.启动按键播放 使用海龟模拟器
ros2 run turtlesim turtle_teleop_key //海龟模拟器 按键模拟
列表 ros2 node list ros2 topic list ros2 service list ros2 action list
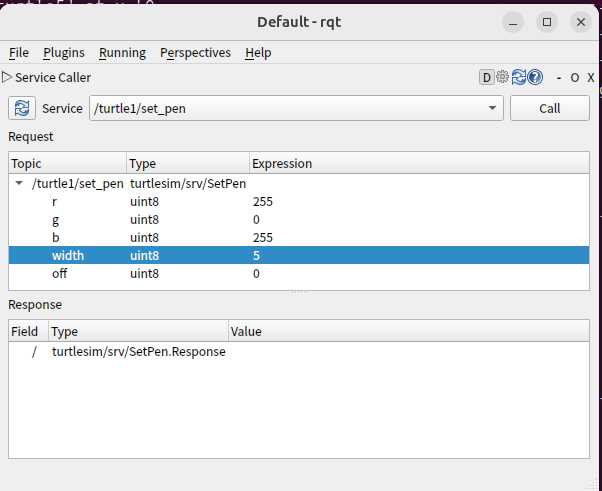
rqt指令
rqt 是 ROS(机器人操作系统)中的一个图形化工具框架,用于可视化、调试和监控 ROS 系统的各种组件,支持 ROS 1 和 ROS 2。它通过插件化架构提供了丰富的功能,是机器人开发和调试过程中的核心工具之一。
核心功能与作用
-
节点与话题监控
-
查看系统中运行的 ROS 节点、话题、服务和参数。
-
可视化节点间的通信拓扑(如
rqt_graph插件)。
-
-
数据可视化
-
实时绘制传感器数据(如激光雷达、IMU)或算法输出(如路径、姿态)。
-
支持图像、点云、曲线等多种数据类型的可视化(如
rqt_plot、rqt_image_view)。
-
-
调试与配置
-
动态调整 ROS 参数(如 PID 控制器增益)。
-
重映射话题、录制 / 回放 ROS 数据(
rosbag相关插件)。
-
-
自定义插件
-
可通过 Python 或 C++ 开发自定义插件,满足特定机器人的调试需求。
-
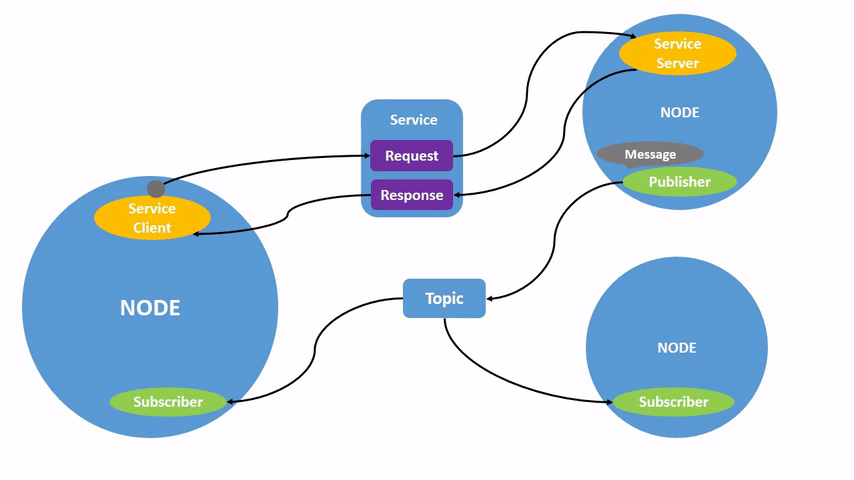
理解node
ROS中的每个节点应负责单一的模块化任务,例如控制车轮电机或发布激光测距仪的传感器数据。每个节点可以通过主题、服务、动作或参数从其他节点发送和接收数据。
ros2 node info <node_name> 节点信息查看
主题 Topic

















 227
227

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









