







 本文深入探讨了Sobel和Canny两种边缘检测算子的工作原理和实现步骤。Sobel算子通过高斯平滑和差分求导寻找图像边缘,而Canny算子则引入非极大值抑制和双阈值检测,提供更精确的边缘检测结果。文章提供了两种算子的OpenCV和Python代码实现,并对比了它们在实际应用中的优缺点。
本文深入探讨了Sobel和Canny两种边缘检测算子的工作原理和实现步骤。Sobel算子通过高斯平滑和差分求导寻找图像边缘,而Canny算子则引入非极大值抑制和双阈值检测,提供更精确的边缘检测结果。文章提供了两种算子的OpenCV和Python代码实现,并对比了它们在实际应用中的优缺点。
sobel和canny边缘检测算子
sobel算子
sobel算子是一种离散微分算子,它通过计算图像亮度值变化的近似梯度,从而识别出图像边缘,近似一阶差分。
步骤
1.高斯平滑;
2.微分求导。
具体过程
1.高斯模糊平滑目的是为了去噪,防止把噪点也检测为边缘。
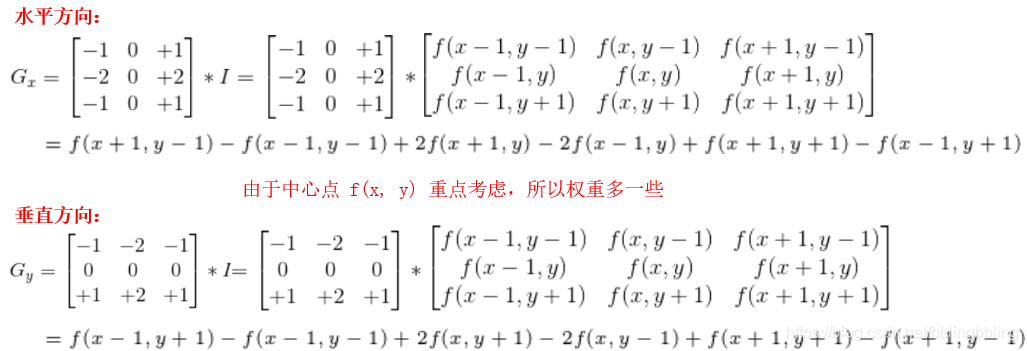
2.对原图分别进行水平方向和垂直方向的卷积(x和y两个方向求导),来计算某个像素的梯度变化幅值和方向。
3.给定一个阈值就可以得到sobel算子计算出的图像边缘。
代码实现
cv2.Sobel(image,cv2.CV_64F,1,0,ksize=3)
2参数表示图像的深度;3,4参数表示dx和dy方向求导的阶数,0表示这个方向上没有求导,一般为0、1、2;5参数表示内核大小,即Sobel算子的矩阵大小,值必须是1、3、5、7,默认为3。
#进行权重融合
dst=cv2.addWeighted(absX,0.5,absY,0.5,0)
canny算子
步骤
1.高斯平滑;
2.计算梯度幅度和方向(sobel);
3.根据梯度方向对幅值进行非极大值抑制;
非极大值抑制:保留局部梯度最大的点,就是可能的边缘点。在梯度方向上差值求亚像素来进行比较。
4.用双阈值算法检测和连接边缘。
使用滞后阈值:如果某一像素位置的梯度幅值超过高阈值, 该像素被保留为边缘像素;如果某一像素位置的幅值小于低阈值, 该像素被舍弃;如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于高阈值的像素时被保留
opencv代码实现
img = cv2.GaussianBlur(gray,(3,3),0)
canny = cv2.Canny(img, 50, 150)
python代码实现
# 1.灰度化
np.dot(img[..., :3], [0.299, 0.587, 0.114])
# 2.高斯滤波
def gaussian(img, kernel=5, sigma=1.5):
filter = np.zeros([kernel, kernel])
pad = kernel//2
for i in range(-pad, -pad + kernel):
for j in range(-pad, -pad + kernel):
filter[i,j] = np.exp( - (i ** 2 + j ** 2) / (2 * sigma * sigma))/(2 * np.pi * sigma * sigma)
filter/=filter.sum()
#与图像卷积
h, w = img.shape
new_img = np.zeros([h, w])
img = np.pad(img, (pad,pad), 'constant')
# new_img[pad: pad + h, pad: pad + w] = img.copy()
for i in range(h):
for j in range(w):
new_img[i, j] = np.sum(img[i:i + kernel, j:j + kernel] * filter)
return new_img
#3.计算梯度幅值和方向
def grad(img):
h, w = img.shape
fx = np.zeros([h-1, w-1])
fy = np.zeros([h-1, w-1])
edge = np.zeros([h-1, w-1])
for i in range(h - 1):
for j in range(w - 1):
fx[i, j] = img[i, j + 1] - img[i, j]
fy[i, j] = img[i + 1, j] - img[i, j]
edge[i, j] = np.sqrt(np.square(fx[i, j]) + np.square(fy[i, j]))
return fx, fy, edge
#4.非极大值抑制(利用差值求亚像素来比较)
def nms(fx, fy, img):
h,w = img.shape
#图像边缘为不可能的分界点
for i in range(1, h-1):
for j in range(1, w-1):
if img[i,j] == 0:
img[i,j] = 0
else:
gx = fx[i,j]
gy = fy[i,j]
dTemp = img[i,j]
#如果方向导数y分量比x分量大,说明导数方向趋向于y分量
if np.abs(gy)>np.abs(gx):
weight = np.abs(gx)/np.abs(gy)
g2 = img[i - 1, j] #上一行
g4 = img[i + 1, j] #下一行
#如果x,y两个方向导数的符号相同
#g1 g2
# C
# g4 g3
if gx*gy>0:
g1 = img[i - 1, j - 1]
g3 = img[i + 1, j + 1]
# g2 g1
# C
#g3 g4
else:
g1 = img[i - 1, j + 1]
g3 = img[i + 1, j - 1]
# 如果方向导数x分量比y分量大,说明导数方向趋向于x分量
else:
weight = np.abs(gy) / np.abs(gx)
g2 = img[i, j - 1] #前一列
g4 = img[i, j + 1] #后一列
# 如果x,y两个方向导数的符号相同
# g1
# g2 C g4
# g3
if gx * gy > 0:
g1 = img[i - 1, j - 1]
g3 = img[i + 1, j + 1]
# g3
# g2 C g4
# g1
else:
g1 = img[i - 1, j + 1]
g3 = img[i + 1, j - 1]
dTemp1 = weight * g1 + (1 - weight) * g2
dTemp2 = weight * g3 + (1 - weight) * g4
if dTemp >= dTemp1 and dTemp >= dTemp2:
img[i, j] = dTemp
else:
img[i, j] = 0
return img
#5.滞后阈值处理
LT = 0.2 * np.max(img)
HT = 0.3 * np.max(img)
h,w = img.shape
nn = np.array(((1., 1., 1.), (1., 0., 1.), (1., 1., 1.)), dtype=np.float32)
for i in range(1, h - 2):
for j in range(1, w - 2):
if (img[i, j] < LT):
img[i, j] = 0
elif (img[i, j] > HT):
img[i, j] = 255
# 把大于LT ,小于HT的点使用8连通区域确定
elif np.max(img[i - 1:i + 2, j - 1:j + 2] * nn) >= HT:
img[i, j] = 255
else:
img[i, j] = 0
sobel算子和canny算子比较
Canny边缘检测算子最为经典,效果最佳,边缘较细,更加准确;
Sobel边缘检测算子计算量小,并没有将图像的主体与背景严格地区分开来。
效果图对比:


















 2303
2303

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









