






参考自n大橘为重n的博客
其实和普通的c++程序定位undefind symble的问题是一样的,如果之前使用过linux下的c++定位undefind symble的方法且没有成功,那么大概率本文方法也不能成功。
问题描述:
以costmap layer插件为例,当我们自己写的插件运行出现undefind symble报错时:
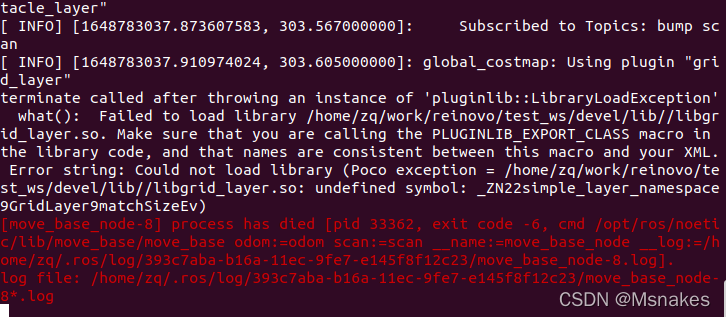
这个问题表明是符号未定义的问题,而且直接定位于我们生成的插件libgrid_layer.so中。
其实如果是自己写的程序,看到_ZN22simple_layer_namespace9GridLayer9matchSizeEv时便可以大致猜到出现问题的可能是simple_layer_namespace::GridLayer::matchSize()。
当然,我们还是按照正常的方式定位。
使用c++filt定位具体问题
$ c++filt _ZN22simple_layer_namespace9GridLayer9matchSizeEv

可以看到具体出现问题的就是这个matchSize()函数,然后就去查看其是否被实现


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









