



当我们的模型中出现两个以上的零件时,如车轮和地面、活塞与气缸、齿轮啮合等,通常会涉及到接触问题,接触是一种复杂的力学现象,在进行结构非线性问题的求解时,除了因材料性质引起的材料非线性和大变形引起的几何非线性外,还设计到接触问题特有的状态非线性。
所谓的状态非线性来自于:
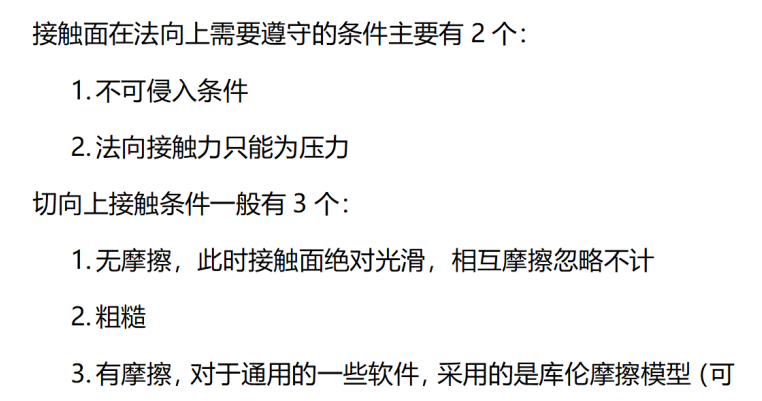
1.接触面的大小、相互位置、接触状态等等都是随时间不断变化的;
2.接触两物体间原则上不应互相侵入,法向上只存在压力,切向上存在摩擦条件。因此接触问题具有强烈的非线性。
以下针对接触的处理方式、求解算法、注意事项内容进行简单介绍。(篇幅原因,这里只讲概念及注意事项,详细内容除进行有限元编程及软件开发外,无需过多了解,推导过程详见接触问题的处理(下))。
01
法向条件与切向条件
02
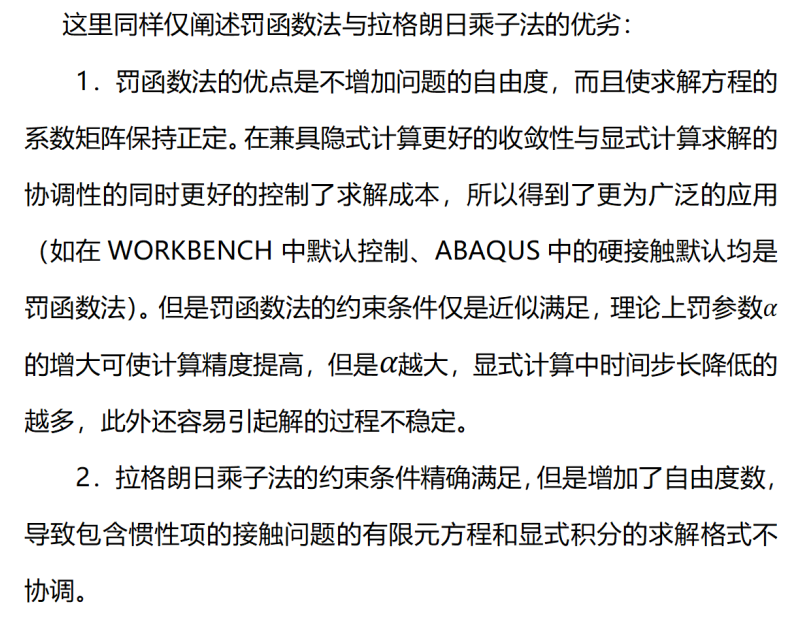
罚函数与拉格朗日对比及应用
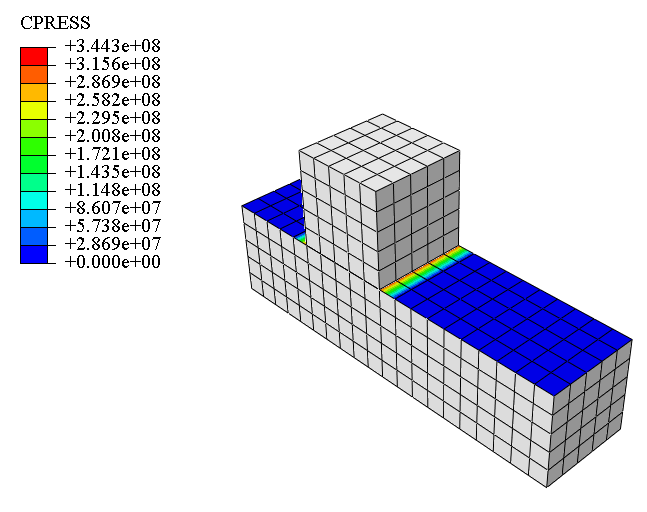
罚函数接触压力
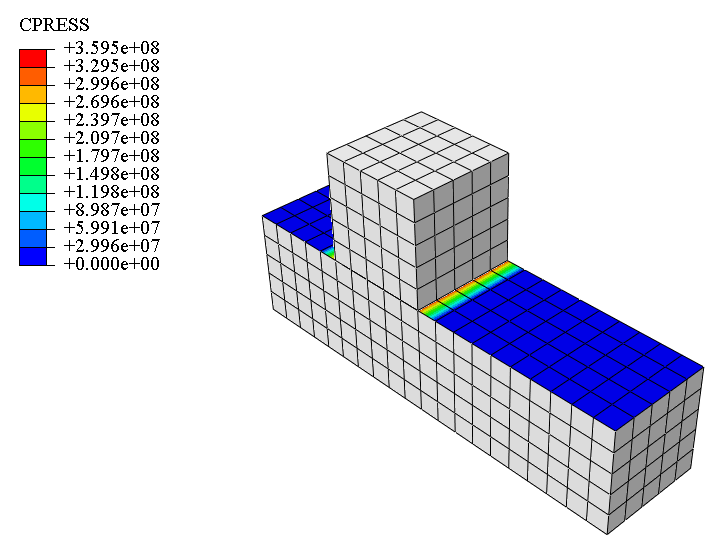
增广拉格朗日接触压力
03
接触的求解算法
03
接触问题调整


















 1129
1129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











