



节能移动边缘计算系统的异步协议设计
摘要
本文研究了一种用于移动边缘计算(MEC)系统的异步卸载协议,其中移动用户的计算任务被部分卸载至基站(BS)处的MEC服务器。在所提出的异步方法中,任务的上传、计算和下载以非对称且非正交的方式进行。本文建立了一个联合优化问题,对发射功率、卸载量以及时频资源进行优化,以最小化整个系统的能耗。通过应用凸优化技术,可以获得异步MEC卸载问题的最优解。数值结果表明,与传统的同步方法相比,所提出的异步协议具有更高的能效。
索引词 —移动边缘计算,任务卸载,节能,资源分配,凸优化。
一、引言
近年来,移动边缘计算(MEC)被视为一种有前景的解决方案,通过与位于网络边缘的计算服务器协作,克服物联网(IoT)设备计算能力低和电池寿命短的问题[1],[2]。MEC协议按上行阶段、计算阶段和下行链路阶段依次执行。首先,在上行阶段,设备不直接在本地处理计算密集型应用,而是将全部或部分计算任务传输至MEC服务器。随后,MEC服务器在计算阶段处理任务数据,设备在下行链路阶段接收计算结果。因此,设备端的数据计算负载得以减轻,从而降低了能耗。
针对通过无线信道进行任务卸载的情况,已对移动边缘计算系统进行了研究,以确定合适的通信协议[3],[4]。为了最小化能耗,针对双用户情况下的任务卸载阶段,研究了功率和时间分配[3]。在[4]中采用了一种同步协议,其中用户数据同时被卸载、处理和下载。通过联合优化传输时间分配、卸载分割以及功率控制,实现了总能耗的最小化。然而,由于上行链路/下行链路和计算在同步协议中是正交执行的,资源利用率可能不高。
本文提出了一种基于异步协议设计的MEC任务卸载方案,其中任务的上传、计算和下载以非对称和非正交方式进行。具体而言,为了充分挖掘通信与计算资源的潜力,用户卸载的任务数据在基站(BS)的MEC服务器上按顺序进行计算,而在计算阶段未参与的用户可同时进行数据上传或下载。针对MEC系统的绿色通信需求,在所提出的异步协议下,通过联合优化发射功率、带宽分配、时间持续时间和任务卸载划分,解决了总能耗最小化问题。为处理该优化问题,将原始的非凸问题转化为等效凸问题,然后利用凸优化技术(如拉格朗日对偶方法和椭球法)获得最优解[6]。数值结果表明,相较于传统同步协议,所提方案具有更好的性能表现[4]。
II. 系统模型与问题表述
我们考虑一个MEC卸载系统,其中用户将他们的计算任务卸载到安装在基站中的MEC服务器。任务卸载针对一组在相近时间内到达任务的 K用户进行。用户 k(k= 1,…, K)需要在最大允许延迟{T}内完成长度为 L k比特的任务 Sk的计算。由于移动设备的计算能力通常有限,因此采用了一种部分卸载策略 [2],[4],即用户 k将其任务 Sk中的 l k ∈[0, L k]比特卸载到MEC服务器。然后,剩余的 L k − l k比特在用户 k本地进行计算。为此,基站通过上行信道接收到长度为 l k 比特的卸载任务后,MEC服务器执行对已卸载比特的计算。随后,基站通过下行链路将计算结果发送给用户。
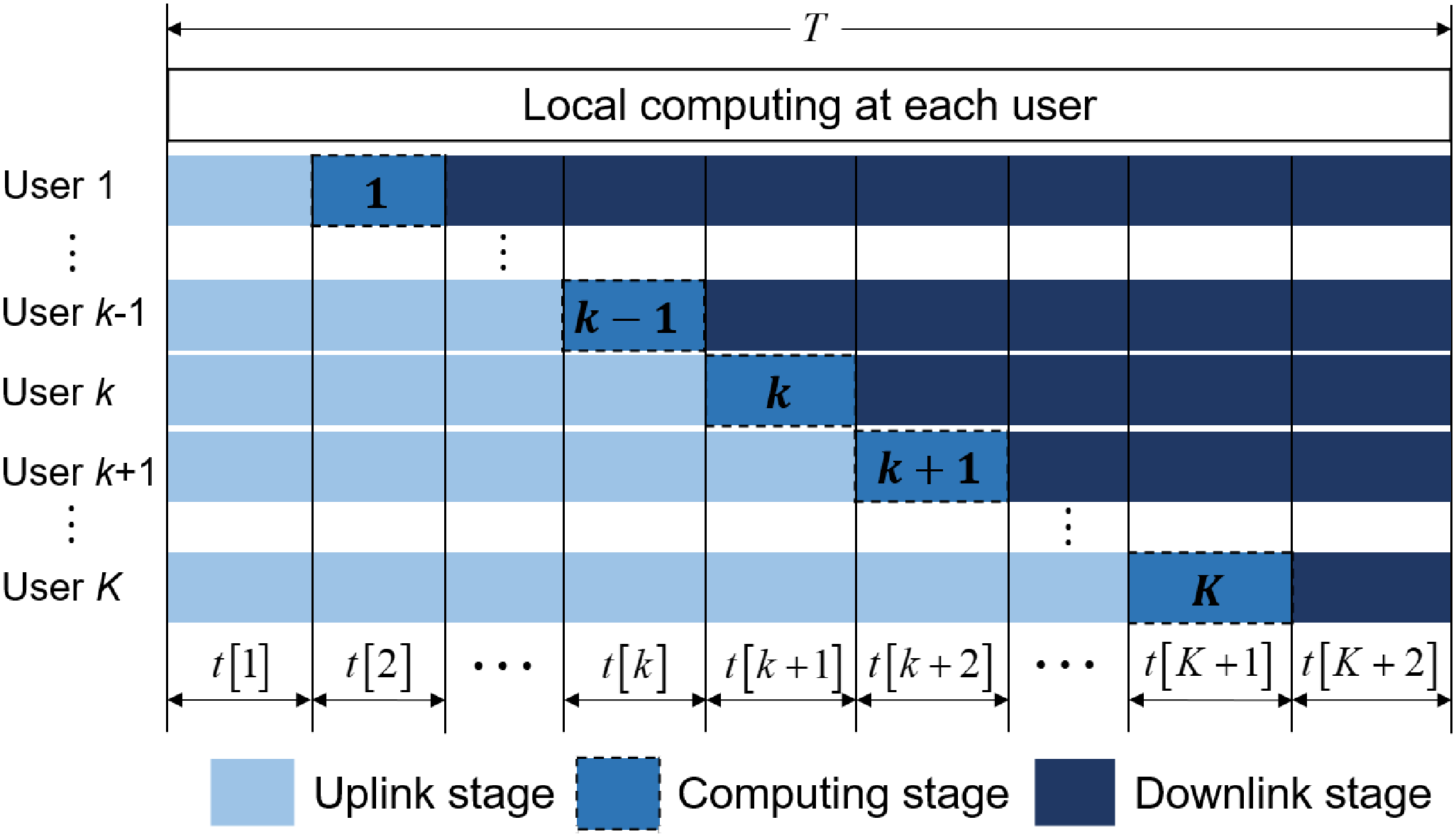
在传统同步协议中,所有用户的上行链路、计算和下行链路阶段都被假定为完全同步。然而,由于计算和上行链路/下行链路在MEC服务器处是分别执行的,基站仍可在计算状态下接收和发送数据。因此,通过允许异步传输和接收,可以进一步提升[4]中同步协议的性能。受此启发,我们在图1中提出了一种用于异步MEC协议的新型帧结构。
A. 提出的异步卸载协议
与同步方案中所有用户处于相同阶段[4]不同,在所提出的异步系统中,每个用户的各个阶段持续时间可能不同。为了建模这一特性,我们将总系统延迟 T划分为 K+ 2个时隙,如图1所示。记 t[n]为时隙 n的持续时间(n= 1,…, K+ 2),则总延迟约束由以下给出
$$
\sum_{n=1}^{K+2} t[n] \leq T. \tag{1}
$$
不失一般性,假设MEC服务器上的计算按从用户1到用户 K的顺序依次进行。在上行阶段,用户 k在时隙n= 1,…, k期间向基站卸载 lk比特数据。随后,在时隙 k+ 1,MEC服务器对来自用户 k的卸载数据进行计算。由于通信资源可以并发使用,因此在时隙 k+ 1,基站接收来自用户 k+ 1,…, K的卸载数据,同时用户1, 2,…, k −1从基站下载其计算结果。在基站完成计算阶段后,计算结果可在时隙 k+ 2,…, K+ 2期间下载至用户 k。
1) 卸载模型:
由于所提出的异步框架精心分配了上行链路、计算和下行链路阶段,因此无论采用何种多址方案,均可通过优化的时间时长成功缓解多用户干扰。由于解码策略简单,采用频分双工和频分多址方案进行任务的上传和下载。因此,所有用户的上行链路和下行链路传输均在正交频率资源上进行,并结合带宽优化。设 αk[n]和 βk[n]分别为用户 k在时隙 n分配给上行链路和下行链路的带宽比例。则有
$$
\sum_{k=n}^{K} \alpha_k[n] + \sum_{k=1}^{n-2} \beta_k[n] = 1, \quad \forall n. \tag{2}
$$
设 hk为基站与用户之间的信道增益,假设在延迟 T期间保持不变。则在上行阶段,用户 k在时隙 n(n ≤ k)内卸载的比特数 I U,k[n]可表示为
$$
I_{U,k}[n] = t[n] W \alpha_k[n] \log_2\left(1 + \frac{p_k[n]\gamma_k}{\alpha_k[n]}\right), \tag{3}
$$
其中 W表示总带宽, pk[n]是用户 k在时隙 n的上行发射功率,γ k ≜ h k /(Wσ²)表示有效信噪比(SNR),σ²为噪声方差。需要注意的是,pk[n]= 0中的 n> k来自图1的异步结构。在上行阶段向MEC服务器上传总共 l k 比特的数据时,每个用户需要满足
$$
\sum_{n=1}^{k} I_{U,k}[n] \geq l_k, \quad \forall k. \tag{4}
$$
在用户 k完成任务数据卸载后,MEC服务器在时隙 k+ 1执行 l k 比特的计算。设 C k (周期/比特)为中央处理器(CPU)每比特所需的计算周期数处理用户 k的输入任务 Sk。然后,在MEC服务器上计算 lk比特所需CPU周期频率fS,k(周期/秒)表示为fS,k= Cklk/t[k+ 1]。由于CPU的实际限制,其周期频率fS,k的设计不应超过其最大上限fS,max,可表示为
$$
C_k l_k \leq t[k+ 1] f_{S,\text{max}}, \quad \forall k. \tag{5}
$$
MEC服务器上对 lk比特数据进行计算的能耗ES,k可通过动态电压频率调节(DVFS)模型表示为ES,k= κS(Cklk)³/t²[k+ 1][1],[2],[4],其中 κS为MEC服务器的有效电容系数。
在MEC服务器处理后,计算结果的数据量假设等于 ηklk,其中 ηk表示计算后数据大小的压缩比,其值取决于用户 k的任务类型。在下行链路阶段,计算结果通过下行链路信道在时隙 k+ 3,…, K+ 2 内转发给用户 k。类似于(3),在时隙 n(n ≥ k+ 2)从基站下载到用户 k的比特数 ID,k[n]可表示为
$$
I_{D,k}[n] = t[n] W \beta_k[n] \log_2\left(1 + \frac{q_k[n]\gamma_k}{\beta_k[n]}\right), \tag{6}
$$
其中 qk[n]表示基站(BS)在时隙 n对用户 k的下行功率,当 n< k+ 2时为0。由于计算结果的长度为 ηklk,因此对用户 k的下行链路传输有如下约束:
$$
\sum_{n=k+2}^{K+2} I_{D,k}[n] \geq \eta_k l_k, \quad \forall k. \tag{7}
$$
2) 本地计算模型:
当卸载的 lk数据位在MEC服务器上处理时,每个用户需要在总允许延迟 T内本地完成剩余 Lk − lk的计算。类似于(5),用户 k本地计算的CPU周期频率fL,k=Ck(Lk − lk)/T受到最大频率限制
$$
C_k(L_k - l_k) \leq T f_{L,\text{max}}, \quad \forall k, \tag{8}
$$
其中fL,max表示每个用户的最大频率。用户 k本地计算的能耗由 EL,k =κ L(Ck( L k − l k))³ /T²给出,其中 κ L表示用户处的有效电容系数。
B. 问题建模
我们的目标是通过联合优化发射功率P ≜{pk[n], qk[n], ∀k, n}、带宽分配W ≜{αk[n], βk[n], ∀k, n}、时间时长T ≜{t[n], ∀n}以及卸载划分O ≜{l k , ∀k},来最小化加权和能量消耗。用户和基站的总能耗 ζ_user 和 ζ_BS 包含了计算和通信过程,分别表示为
$$
\zeta_{\text{user}} = \sum_{k=1}^{K} E_{L,k} + \sum_{k=1}^{K} \sum_{n=1}^{k} t[n]p_k[n], \tag{9}
$$
$$
\zeta_{\text{BS}} = \sum_{k=1}^{K} E_{S,k} + \sum_{k=1}^{K} \sum_{n=k+2}^{K+2} t[n]q_k[n]. \tag{10}
$$
将用户和基站的峰值功率预算分别记为 PU和 PD,该问题被表述为
$$
(\text{P1}): \min_{P,W,T,O} w_1 \zeta_{\text{user}} + w_2 \zeta_{\text{BS}} \tag{11a}
$$
s.t.
$$
l_{k,\text{min}} \leq l_k \leq L_k, \quad \forall k, \tag{11b}
$$
$$
p_k[n] \leq P_U, \quad \forall k, n,
$$
$$
\sum_{k=1}^{K} q_k[n] \leq P_D, \quad \forall n, \tag{11c}
$$
$$
(1),(2),(4),(5),(7),
$$
其中 w₁和 w₂表示对总能耗的非负权重,lk,min= max(0, Lk − T fL,max/Ck)来自(8)。对于目标函数(11a)以及约束(4)和(7),由于仿射函数与凹函数的乘积既非凸也非凹,因此问题(P1)通常是一个非凸问题,从而难以处理该问题(P1)。在下一节中,我们将研究求解问题(P1)的全局最优方法。
III. 所提算法
我们提出了一种用于求解非凸问题(P1)的最优算法。为此,我们首先通过变量替换将问题(P1)重新表述为一个等效凸问题。
$$
E_{U,k}[n] = t[n]p_k[n], \quad E_{D,k}[n] = t[n]q_k[n], \tag{12}
$$
$$
A_k[n] = t[n]\alpha_k[n], \quad B_k[n] = t[n]\beta_k[n]. \tag{13}
$$
由(12)式可知,(9)和(10)中的能耗转化为
$$
\xi_{\text{user}} = \sum_{k=1}^{K} E_{L,k} + \sum_{k=1}^{K} \sum_{n=1}^{k} E_{U,k}[n], \tag{14}
$$
$$
\xi_{\text{BS}} = \sum_{k=1}^{K} E_{S,k} + \sum_{k=1}^{K} \sum_{n=k+2}^{K+2} E_{D,k}[n]. \tag{15}
$$
此外,通过应用(13),我们可以将(3)中的$ I_{U,k}[n] $以及(6)中的$ I_{D,k}[n] $重写为
$$
I_{U,k}[n] = W A_k[n] \log_2\left(1 + \frac{E_{U,k}[n]\gamma_k}{A_k[n]}\right), \tag{16}
$$
$$
I_{D,k}[n] = W B_k[n] \log_2\left(1 + \frac{E_{D,k}[n]\gamma_k}{B_k[n]}\right). \tag{17}
$$
然后,问题(P1)的等效重构如下所示
$$
(\text{P1.1}): \min_{E \succeq 0, A \succeq 0, T \succeq 0, O} w_1 \xi_{\text{user}} + w_2 \xi_{\text{BS}} \tag{18a}
$$
s.t.
$$
E_{U,k}[n] \leq t[n]P_U, \quad \forall k, n, \tag{18b}
$$
$$
\sum_{k=1}^{K} E_{D,k}[n] \leq t[n]P_D, \quad \forall n, \tag{18c}
$$
$$
\sum_{k=n}^{K} A_k[n] + \sum_{k=1}^{n-2} B_k[n] \leq t[n], \quad \forall n, \tag{18d}
$$
$$
(1),(4),(5),(7),(11b),
$$
其中 $ E \triangleq {E_{U,k}[n], E_{D,k}[n], \forall k, n} $,$ A \triangleq {A_k[n], B_k[n], \forall k, n} $。(P1.1)现在变为凸问题,因为(14)和(15)是凸函数,而(16)和(17)分别是${E_{U,k}[n], A_k[n]}$和${E_{D,k}[n], B_k[n]}$的联合凹函数。此外,由于Slater条件成立,因此(P1.1)满足强对偶性。因此,可以通过拉格朗日对偶方法获得全局最优解。
(P1.1)的拉格朗日函数表示为
$$
\begin{aligned}
\mathcal{L}(E, A, T, O, \lambda, \mu, \nu) = & \sum_{k=1}^{K} \sum_{n=1}^{k} F_{U,k}[n] + \sum_{k=1}^{K} F_{C,k} \
& + \sum_{k=1}^{K} \sum_{n=k+2}^{K+2} F_{D,k}[n] + \rho_1 t[1] + \rho_{K+2} t[K+2] - \mu_T T, \tag{19}
\end{aligned}
$$
其中
$$
F_{U,k}[n] \triangleq (w_1 + \lambda_{U,k}[n])E_{U,k}[n] - \nu_{U,k}I_{U,k}[n] + \mu_A[n]A_k[n],
$$
$$
F_{C,k} \triangleq w_1 E_{L,k} + w_2 E_{S,k} + Y_k t[k+1] + Z_k l_k,
$$
$$
Y_k \triangleq
\begin{cases}
J_k - P_U \sum_{m=k+1}^{K} \lambda_{U,m}[k+1], & \text{if } k=1 \
J_k - P_U \sum_{m=k+1}^{K} \lambda_{U,m}[k+1] - P_D \lambda_{D}[k+1], & \text{if } k=2,\dots,K-1 \
J_k - P_D \lambda_{D}[k+1], & \text{if } k=K
\end{cases}
$$
$$
J_k \triangleq -\mu_A[k+1] + \mu_T - \mu_{O,k} \frac{f_{S,\text{max}}}{C_k},
$$
$$
Z_k \triangleq \mu_{O,k} + \nu_{U,k} + \eta_k \nu_{D,k},
$$
$$
F_{D,k}[n] \triangleq (w_2 + \lambda_{D}[n])E_{D,k}[n] - \nu_{D,k}I_{D,k}[n] + \mu_A[n]B_k[n],
$$
$$
\rho_1 \triangleq P_U \sum_{k=1}^{K} \lambda_{U,k}[1] - \mu_A[1] + \mu_T,
$$
$$
\rho_{K+2} \triangleq -P_D \lambda_{D}[K+2] - \mu_A[K+2] + \mu_T.
$$
在(19)中,$ \lambda \triangleq {\lambda_{U,k}[n], \forall k, \forall n \leq k, \lambda_{D}[n], 3 \leq n \leq K+2} $,$ \mu \triangleq {\mu_A[n], \forall n, \mu_T, \mu_{O,k}, \forall k} $和 $ \nu \triangleq {\nu_{U,k}, \nu_{D,k}, \forall k} $分别是对应于约束(18b)-(18d)、(1)、(5)、(4)和(7)的非负拉格朗日乘子。
然后,对偶函数 $ g(\lambda, \mu, \nu) $ 可以表示为
$$
g(\lambda, \mu, \nu) = \min_{E \succeq 0, A \succeq 0, T \succeq 0, O} \mathcal{L}(E, A, T, O, \lambda, \mu, \nu) \tag{20}
$$
s.t. (11b).
由(19)可得,$ \rho_1 \geq 0 $、$ \rho_{K+2} \geq 0 $和 $ Y_k \geq 0, \forall k $,以确保$ g(\lambda, \mu, \nu) > -\infty $。从(19)可知,拉格朗日函数由四个不同项的线性组合给出:$ F_{U,k}[n] $、$ F_{C,k} $、$ F_{D,k}[n] $和 $ \rho_n t[n] $,这些项可利用给定的对偶变量 $ \lambda $、$ \mu $和 $ \nu $分别处理。
基于这一观察,通过固定对偶变量,我们将(20)解耦为 $ K^2 + 2K + 2 $个子问题,即
$$
(\text{SP}-1): \min_{l_{k,\text{min}} \leq l_k \leq L_k, t[k+1] \geq 0} F_{C,k}, \quad \forall k, \tag{21}
$$
$$
(\text{SP}-2): \min_{t[n] \geq 0} \rho_n t[n], \quad \text{for } n=1 \text{ and } K+2, \tag{22}
$$
$$
(\text{SP}-3): \min_{E_{U,k}[n] \geq 0, A_k[n] \geq 0} F_{U,k}[n], \quad \forall k, n, \tag{23}
$$
$$
(\text{SP}-4): \min_{E_{D,k}[n] \geq 0, B_k[n] \geq 0} F_{D,k}[n], \quad \forall k, n. \tag{24}
$$
得益于凸性,可通过检查卡鲁什-库恩-塔克(KKT)条件轻松获得这些子问题的最优解。
首先,根据零梯度条件,计算出(SP-1)的最优 $ l_k^ $ 和 $ t^ [k+1] $
$$
l_k^
= \left[L_k - \frac{T \sqrt{3} C_k (\omega_2 \kappa_S Y_k^2 / 4)^{1/3} + Z_k}{3 w_1 \kappa_L C_k^3} \right]
{L_k}^{l
{k,\text{min}}}, \tag{25}
$$
$$
t^
[k+1] = l_k^* \left( \frac{Y_k}{2 w_2 \kappa_S C_k^3} \right)^{-1/3}, \tag{26}
$$
其中 $[x]_y^z \triangleq \max{y, \min{x, z}}$ 表示 x 的下限和上限分别为 y 和 z。
对于线性规划(LP) (SP-2),可获得 $ n=1 $ 和 $ K+2 $ 的最优解
$$
t^*[n] =
\begin{cases}
\tau[n], & \text{if } \rho_n = 0 \
0, & \text{if } \rho_n > 0
\end{cases}, \tag{27}
$$
其中 $ \tau[n] $ 可以是任意非负实数。将 $ t^ [n] $ 代入(SP-2)的目标值,对于任意给定的 $ \tau[n] $ 和 $ \rho_n $ 结果恒为零。这意味着最优解 $ t^ [n] $ 的选择不影响对偶函数。为简便起见,我们设 $ t^*[n] = 0 $ 以获取 $ n=1 $ 和 $ K+2 $ 的对偶变量。
接下来,分别获得(SP-3)和(SP-4)的最优解 ${E^ _{U,k}[n], A^ _k[n]}$ 和 ${E^ _{D,k}[n], B^ _k[n]}$。
$$
E^
_{U,k}[n] = A^
k[n] Q
{U,k}[n], \tag{28}
$$
$$
E^
_{D,k}[n] = B^
k[n] Q
{D,k}[n], \tag{29}
$$
其中
$$
Q_{U,k}[n] \triangleq \left[ \frac{\nu_{U,k} W}{\ln 2 (w_1 + \lambda_{U,k}[n])} - \frac{1}{\gamma_k} \right]^+,
$$
$$
Q_{D,k}[n] \triangleq \left[ \frac{\nu_{D,k} W}{\ln 2 (w_2 + \lambda_{D}[n])} - \frac{1}{\gamma_k} \right]^+,
$$
与 $[x]^+ \triangleq \max{x, 0}$ 类似。类似于(SP-2)的情况,$ A^ _k[n] $ 和 $ B^ _k[n] $ 对对偶函数没有影响,因此被设为零。
通过使用解析解(25)-(29),可直接对任意给定的对偶变量计算对偶函数 $ g(\lambda, \mu, \nu) $。(P1.1)的对偶问题被表述为
$$
\max_{\lambda \succeq 0, \mu \succeq 0, \nu \succeq 0} g(\lambda, \mu, \nu) \tag{30a}
$$
s.t.
$$
\rho_1 \geq 0, \rho_{K+2} \geq 0, Y_k \geq 0, \forall k, \tag{30b}
$$
$$
V_{U,k}[n] \geq 0, \forall k, n, \tag{30c}
$$
$$
V_{D,k}[n] \geq 0, \forall k, n, \tag{30d}
$$
其中,(30b)是来自(20)的边界条件,(30c)和(30d)分别是来自(SP-3)和(SP-4)的KKT条件,
$$
V_{m,k}[n] \triangleq -\nu_{m,k} W \log_2(1 + Q_{m,k}[n]\gamma_k) + \frac{\nu_{m,k} W \gamma_k Q_{m,k}[n]}{\ln 2 (1 + Q_{m,k}[n]\gamma_k)} + \mu_A[n], \quad \text{for } m \in {U, D}.
$$
对偶问题可以通过次梯度法(例如椭球法[7])进行最优求解。令 $ \Delta x $ 为关于 $ x $ 的目标函数(30)的次梯度。然后,我们有
$$
\Delta \lambda_{U,k}[n] = E_{U,k}[n] - t[n]P_U, \quad \forall k, \forall n \leq k,
$$
$$
\Delta \lambda_{D}[n] = \sum_{k=1}^{n-2} E_{D,k}[n] - t[n]P_D, \quad \text{for } 3 \leq n \leq K+2,
$$
算法1:求解(P1)的算法。
- 初始化 ${\lambda, \mu, \nu}$。
-
重复:
- 从(25)-(29)中获取 ${E^ , A^ , T^ , O^ }$。
- 通过约束椭球法更新 ${\lambda, \mu, \nu}$。 - 直到收敛。
- 通过求解问题(31)获得 ${A^ , t^ [1], t^ [K+2]}$ 给定 ${\lambda^ , \mu^ , \nu^ }$。
- 获得 $ p^ _k[n] = E^ _{U,k}[n]/t^ [n] $, $ q^ _k[n] = E^ _{D,k}[n]/t^ [n] $, $ \alpha^ _k[n] = A^ _k[n]/t^ [n] $,以及 $ \beta^ _k[n] = B^ _k[n]/t^ [n] $, $\forall k, n$。
$$
\Delta \mu_A[n] = \sum_{k=n}^{K} A_k[n] + \sum_{k=1}^{n-2} B_k[n] - t[n], \quad \forall n,
$$
$$
\Delta \mu_T = \sum_{n=1}^{K+2} t[n] - T, \quad \Delta \mu_{O,k} = l_k - \frac{t[k+1]f_{S,\text{max}}}{C_k}, \quad \forall k,
$$
$$
\Delta \nu_{U,k} = l_k - \sum_{n=1}^{k} I_{U,k}[n], \quad \forall k,
$$
$$
\Delta \nu_{D,k} = \eta_k l_k - \sum_{n=k+2}^{K+2} I_{D,k}[n], \quad \forall k.
$$
在获得最优对偶变量 ${\lambda^ , \mu^ , \nu^ }$ 后,最优原始解 $ l_k^ $ 和 $ t^ [k+1] $ 可分别由(25)和(26)得到。然而,当基于KKT条件时,最优原始解 $ E^ $, $ A^ $, $ t^ [1] $ 以及 $ t^ [K+2] $ 需要重新定义,条件为 $ \rho_1 = 0 $, $ \rho_{K+2} = 0 $, $ V_{U,k}[n] = 0 $ 或 $ V_{D,k}[n] = 0 $。为此,通过将 $ E^ {U,k}[n] $ 和 $ E^* {D,k}[n] $ 代入(P1.1)中的(28)和(29),构造相应的优化问题。
$$
\min_{A \succeq 0, t[1] \geq 0, t[K+2] \geq 0} w_1 \sum_{k=1}^{K} \sum_{n=1}^{k} Q_{U,k}[n] A_k[n] + w_2 \sum_{k=1}^{K} \sum_{n=k+2}^{K+2} Q_{D,k}[n] B_k[n] \tag{31a}
$$
s.t.
$$
Q_{U,k}[n] A_k[n] \leq t[n] P_U, \quad \forall k, n, \tag{31b}
$$
$$
\sum_{k=1}^{n-2} Q_{D,k}[n] B_k[n] \leq t[n] P_D, \quad \forall n, \tag{31c}
$$
$$
\sum_{n=1}^{k} W \log_2(1 + Q_{U,k}[n]\gamma_k) A_k[n] \geq l_k, \quad \forall k, \tag{31d}
$$
$$
\sum_{n=k+2}^{K+2} W \log_2(1 + Q_{D,k}[n]\gamma_k) B_k[n] \geq \eta_k l_k, \quad \forall k, \tag{31e}
$$
$$
(1),(18b).
$$
由于(31)是一个凸线性规划,其最优解 ${A^ , t^ [1], t^*[K+2]}$ 可通过内点法[6]轻松获得。求解(P1)的一个最优步骤总结于算法1中。
算法1的计算主要由椭球法决定,该方法在每次迭代中迭代更新 $ N_{\text{dual}} = 0.5K^2 + 5.5K + 3 $ 个对偶变量,每次迭代的复杂度为 $ O(N_{\text{dual}}^2) = O(K^4) $。由于椭球法需要 $ O(N_{\text{dual}}^2) $ 步才能收敛,因此算法1的复杂度为 $ O(K^8) $[7]。注意到(P1.1)中的原始变量 $ N_{\text{primal}} = 2K^2 + 6K + 2 $ 的数量是对偶变量的四倍。因此,所提算法相比之下,该方法处理对偶问题,与直接求解(P1.1)的方法相比具有更低的计算复杂度。该协议的整体流程如下:基站接收来自用户的信息,并根据算法1计算最优资源分配。在基站将结果反馈给用户后,MEC系统可按照图1所示运行。
IV. 数值结果
我们给出了数值结果,以展示异步协议在总带宽为 $ W = 10 $ MHz 和 $ \sigma^2 = -174 $ dBm/Hz 的移动边缘计算系统中的性能。上行链路和下行链路功率约束分别设置为 $ P_U = 35 $ dBm 和 $ P_D = 40 $ dBm。信道增益 $ h_k $ 生成方式如下:$ h_k = G d_k^{-\theta} $[2],其中 $ G = -60 $ dB 表示1米处的参考路径损耗,$ d_k $ 表示从基站到用户 k 的距离,该用户均匀分布在[50 m, 200 m]范围内,$ \theta = 3.5 $ 为路径损耗指数。最大CPU周期和有效电容系数固定为 $ f_{L,\text{max}} = 2 \times 10^9 $, $ f_{S,\text{max}} = 5 \times 10^{10} $, $ \kappa_L = 10^{-27} $ 和 $ \kappa_S = 10^{-29} $[4] $ \forall k $ $ \forall k $ $ C_k = 10^3 $ $ \eta_k = 0.5 $ $ w_1 = 1 $ $ w_2 = 0.2 $[4]。此外,我们应用了,,,, 和 。作为基准方案,我们考虑传统的同步 MEC卸载协议[4],该协议可由所提出的异步协议推导得出,其中所有卸载数据在MEC服务器上使用CPU周期 $ f_S = \sum_{k=1}^{K} C_k l_k / \sum_{n=2}^{K+1} t[n] $ 同时处理,并且在时隙 $ 2,\dots,K+1 $ 期间不使用通信资源($ p_k[n] = q_k[n] = 0, \forall k $)。
表I 各种排序方案在 $ T = 50 $ 毫秒和 $ L_k = 200 $ 千比特下的能耗(焦耳)
| 排序方案 | K=3 | K=5 | K=7 |
|---|---|---|---|
| Optimal | 0.82 | 1.35 | 1.98 |
| Proposed | 0.84 | 1.38 | 2.03 |
| Descend | 0.91 | 1.52 | 2.25 |
| Ascend | 0.95 | 1.60 | 2.38 |
| Random | 0.93 | 1.56 | 2.30 |
表I研究了用户排序对所提出的异步方法的能耗性能的影响。我们考察了以下排序策略。
- Optimal : 通过在 $ K! $ 个候选方案中进行穷尽搜索,数值上确定了最小化能耗的最佳顺序。
- Proposed : 对用户进行排序,使得 $ h_1 \geq h_K \geq h_2 \geq h_3 \geq \dots \geq h_{K-1} $。
- Descend/ascend : 用户按照信道增益 ${h_k}$ 的降序/升序排列。
- Random : 不考虑任何排序,任务卸载以任意优先级执行。
从表中可以看出,所提出的排序方法实现了接近最优的性能,并优于其他方法。让我们解释一下该排序方法背后的思路。在所提出的异步方案中,用户 $ k = 2,\dots,K-1 $ 被分配了至少两个时隙用于上传和下载任务。相比之下,用户1和 K 分别仅有一个时隙 $ t[1] $ 和 $ t[K+2] $ 用于上传和下载,因此他们的传输必须在一个时隙内完成。因此,当信道条件较好的用户被分配为第一个和最后一个用户时,传输时间 $ t[1] $ 和 $ t[K+2] $ 可以减少。随着计算时间 $ t[2],\dots,t[K+1] $ 的增加,服务器端消耗的计算能耗可以降低。因此,基于所提出的排序方法的性能几乎与最优方案相当,但复杂度大大降低。
图2显示了在不同延迟T下,能耗性能随用户数量 K 的变化情况。对于所有 K 种情况,所提出的异步方案优于传统的同步方案。在同步方法中,所有 K 个用户的任务数据在MEC服务器上同时进行计算,且仅在 MEC服务器不进行计算时才执行上传和下载,导致能耗利用效率低下。另一方面,由于在异步方式下对有限的无线资源进行了精细优化,所提出的方案能够节省能耗。出于类似原因,无论 T 如何,该方案均表现出更低的能耗。例如,当 $ K = 7 $ 和 $ T = 30 $ 毫秒时,我们观察到所提出的方法相比同步方法能耗降低了54%。
不同任务大小 $ L_k $ 下的能耗如图3所示。对于所有 $ L_k $,与传统的同步方案相比,所提出的异步方法可以显著降低能耗。在所提出的方法中,由于传输以异步方式进行,相较于同步方案,可为上行链路和下行链路阶段分配相对更多的时间。这增加了任务卸载划分的自由度,使得任务能够以更节能的方式进行卸载。可以看出,异步方法能够处理更大规模的任务相同的能量配额。在具有1焦耳能量容量的 $ K = 6 $ 用户系统中,异步方法比同步方法可多处理约40 kbits的数据。图4绘制了计算后数据大小压缩比为 $ \eta_k $、$ K = 5 $、$ T = 50 $ 毫秒和 $ L_k = 200 $ kbits时的能量消耗性能。无论 $ \eta_k $ 如何,所提出的异步方法均优于传统的同步方法。在异步和同步协议中,随着 $ \eta_k $ 的增加,能耗单调增加,因为下载计算结果需要消耗更多能量。此外,随着下载时间的增长,分配给上传和服务器计算的时间减少,导致能耗增加。从数值结果可以看出,通过高效的资源利用率,所提出的异步方案相比同步方案能够实现更高效的移动边缘计算卸载。
五、结论
我们提出了异步移动边缘计算协议,其中任务的上传、计算和下载是异步进行的。通过优化发射功率、卸载量和时频分配,已解决了总能耗最小化问题。利用凸优化技术,可以得到该问题的最优解。数值结果表明了异步操作在MEC系统中的有效性。未来工作方面,研究结合并行计算的异步MEC协议以及延迟最小化问题可能是一个重要的研究方向。此外,所提出的MEC协议可应用于无人机辅助系统[8]、中继网络[9]、无线供电通信网络[10]或学习框架[11]。

















 812
812

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









