



SIN:一种用于群体机器人的可编程平台
摘要
群体机器人技术受到自然的启发,融合了群体智能以促进集体机器人的发展。这项新兴技术通常由一群简单、低成本且小型的机器人构成,而非依赖复杂且昂贵的单一机器人。设计最优可靠的群体智能算法需要真实世界测试环境。作为一种实用解决方案,物理平台能够有效解决这一问题。本文介绍了一种用于群体机器人技术的可编程物理平台,称为SIN。用户可轻松调整多种设计参数,如通信范围、信号模式、传感器和执行器类型、协作规则以及不确定性和噪声程度。每个智能体的构建模块均以模块化形式开发,以提高硬件灵活性。为了展示所提出平台的有效性,本文以协同多机器人目标跟踪问题作为案例研究,在该平台上进行了实现,其中机器人通过基于短距离且有噪声的光通信的人工吸引‐排斥力进行交互。实验结果表明,去中心化聚集和集体目标跟踪等群体行为细节能够成功地在所提出的平台上实现。
关键词 —群体机器人技术,可编程平台,群体聚集,协同目标跟踪。
一、引言
群体机器人技术是两个应用研究领域的协同结合,即群体智能和机器人技术[1‐5]。当机器人之间表现出集体智能时,会出现一些在单个机器人中无法观察到的涌现行为。灵活性、简单性、并行性、可扩展性、可持续性、成本效益、能效和鲁棒性是群体机器人技术的关键特征[6‐12]。受自然启发的群体智能使群体机器人技术能够应对复杂任务,并使其在不同应用中具有吸引性[13‐23]。本文回顾了关于这一有前景方法的一些先前的研究[24‐26]。
洛桑联邦理工学院的一个团队设计了爱丽丝,一种2.2厘米宽的群体机器人,已用于许多研究应用[27]。斯图加特大学的另一个团队开发了名为茉莉花的群体机器人,尺寸为3厘米,作为一个开源群体机器人平台[28]。林肯大学还开展了另一个项目,名为科里亚斯群体机器人[29, 30]。由曼彻斯特大学设计的莫娜群体机器人,尺寸为6.5厘米,是一个开源模块化平台,支持使用无线通信或视觉显示等附加插件。该平台的最新版本已被广泛应用于各种教育和研究目的[31, 32]。由马来西亚普特拉大学设计的AMiR,尺寸为6.5厘米,是一种用于群体机器人技术的低成本但坚固且移动的平台[33]。千足机器人由哈佛大学开发,是另一种具备分组和群组规划能力的应用平台。由于其简单性和低能耗,千足机器人可在无需电池充电的情况下连续工作长达24小时[34, 35]。ARGoS是由马尔科·多里戈的研究团队设计和仿真的另一个平台[36‐39]。此外,Elisa‐III适用于实现分布式算法[40]。刷毛机器人是一种高效的群体微型机器人,配备8位微处理器,用于电动运动和数据传输[41]。
群体机器人技术的一个知名应用是纳米机器人技术,其中每个机器人都是具有有限能力的简单纳米级代理。因此,通过群体智能实现这些代理之间的有效协作至关重要。以往关于群体智能在纳米机器人技术中应用的研究主要集中在纳米医学[42‐47]。设计最优可靠的群体智能算法需要在真实群体上测试算法的性能。在微观尺度上进行测试具有挑战性且成本高昂。此外,在计算机软件中模拟现实世界的噪声和不确定性也很困难。作为一种实用的方法,宏观物理平台能够有效促进最优设计。
本文介绍了一种用于群体机器人技术的可编程物理平台,称为SIN。由于智能体的所有组件都是模块化且可编程的,并且用户可以轻松地激活或停用这些组件,因此可以在这一灵活的开源平台上实现不同的群体智能算法以及群体中的通信与协作模式。为了说明所提出平台的有效性,本研究以协同多机器人目标跟踪问题为例在该平台上进行了实现[45],其中机器人通过基于短距离且有噪声的光通信的人工吸引‐排斥力进行交互。
本文的结构如下。在第2节中,提出了本文案例研究的数学模型。然后,在第3节中利用该模型进行计算机仿真。第4节介绍了每个机器人的硬件结构。第5节展示了实际实现的细节和测试结果。最后,第6节对全文进行总结。
II. 数学建模
在本节中,针对本文的案例研究提出了一个数学模型[45]。该群体的目标是在存在噪声和不确定性的情况下实现去中心化聚集和协同目标跟踪。机器人的运动基于智能体与目标之间的简单吸引/排斥力。智能体的个体行为和集体行为受到真实微观生物代理布朗运动的启发。
以下方程描述了N个个体群体的主导动力学:
(1)
并且在此方程中, 在n维空间中的位置和速度分别为机器人的位置和速度,xt是可在空间中独立移动的目标的位置,dt,i是目标与机器人i之间的欧几里得距离,ft,i(.):R→R是从目标施加到机器人i的与距离相关的吸引力,dj,i 是机器人j与机器人i之间的欧几里得距离,fj,i(.):R→R是从机器人j施加到机器人i的与距离相关的吸引‐排斥力,而fn是仿生白噪声。根据此方程并如图2所示,每个智能体的速度是来自目标和其他代理施加的力的函数,而这些力非常依赖于它们之间的距离。

IV. 硬件结构
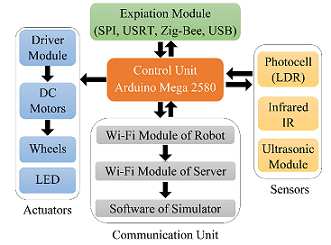
图6展示了每个智能体的功能架构。所有组件,包括传感器、执行器和通信模块,均采用模块化方式设计,因此用户可以独立地激活或停用它们。机器人中嵌入了多种类型的收发器,以实现群体中的不同通信方式,包括超声波和光学通信。每个机器人均配备一个Wi‐Fi收发器,使其能够与服务器通信,实现监控和数据记录。此外,用户可通过该接口对群体进行重新编程,并将特定的群体智能算法上传至机器人的处理单元。
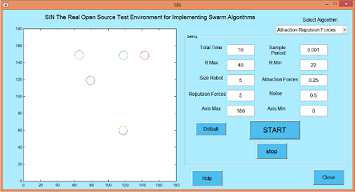
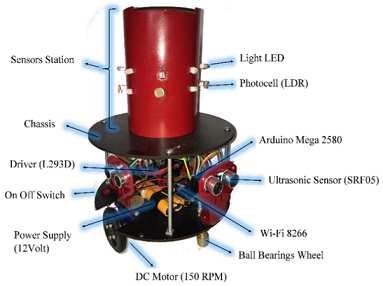
图7展示了所提出的群体平台中每个智能体的硬件结构细节,该智能体是一个直径为20厘米的简单机器人。图中表示了所有嵌入式传感器、执行器、处理单元和通信模块。机器人的机械结构使用SolidWorks设计。受自然启发,默认的传感器和通信模块类型为光学类型,具有短程、有噪声的特点。图8描绘了在群体聚集和目标跟踪过程中从智能体间的光通信记录的实际样本信号。由于所提出的平台具有高灵活性,用户可以轻松激活其他类型的组件。
V. 实现
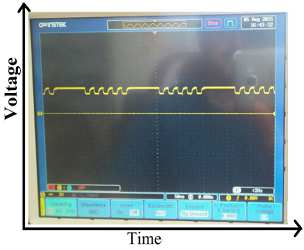
图9展示了在1.8米 × 1×1.8米环境中,所提出的群机器人平台对本文案例研究的实际实现。该平台由内沙布尔大学智能系统与机器人实验室于2015年至2018年设计。此外,该项目在多个全国性节日[45]中被选中并获奖。图中显示了群体在8个时间点的时空分布。数学建模和计算机仿真中假设的所有参数和设置,包括噪声和不确定性,在实际实现中均被准确考虑。如图所示,群体能够成功实现稳定编队、发现目标并高效地对其进行跟踪。结果表明,去中心化聚集和集体目标跟踪等群体行为的细节如何在所提出的平台上成功实现。
VI. 结论
本文介绍了一种名为SIN的可编程平台,用于测试机器人集群。机器人结构简单、低成本且小型化。机器人的所有组件,包括传感器、执行器和收发器,均为模块化且可编程。服务器上设有用户友好的图形用户界面,用于监控和数据记录。此外,用户可轻松地从机器人中激活、停用和重新编程各个模块,并能方便地上传不同的群体智能算法至集群。在本文的案例研究中,智能体之间的交互基于可编程人工吸引‐排斥力。同时,智能体之间的通信采用短程且有噪声的信号。考虑了群体动力学的数学模型,并通过计算机仿真研究了编队性能。所提出的平台在存在噪声和不确定性的条件下进行了实际实现测试。实际结果表明,群体聚集和目标跟踪得以高效完成。该灵活的开源平台可支持多种群体智能算法的实现。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









