 APD激光雷达接收电路设计
APD激光雷达接收电路设计




基于APD的激光雷达信号接收电路设计
摘要
本文重点研究激光雷达的信号接收电路。设计了一种用于脉冲飞行时间(TOF)激光雷达的信号接收电路。文中介绍了激光雷达和高速光电探测的原理。该电路由雪崩光电二极管阵列、跨阻放大器和差分接收放大器组成。在电路中,采用雪崩光电二极管作为光电转换器,选用AD8015是因为其具有宽带宽和单电源跨阻特性。AD8130是一款在高频下具有极高共模抑制比的差分转单端放大器,因此用于将差分信号转换为单端信号。本文采用905纳米波长、20纳秒脉宽的激光脉冲信号进行实验验证。测试结果表明,激光雷达接收电路的性能满足原理系统的要求。
关键词 :电路,激光雷达,雪崩光电二极管
引言
基于APD阵列的激光雷达具有高探测灵敏度、高测量精度、高探测效率、低功耗等优点。由于这些优点,基于APD阵列的激光雷达被广泛应用于军事和工业领域。
脉冲TOF激光雷达装置通常由以下部分组成:脉冲激光发射器、接收通道、时间数字转换器(TDC)和控制与信号处理部分[1]。如图1所示。
APD阵列是激光雷达的光电探测器。反射光脉冲在雪崩光电二极管中被转换为电流脉冲。因此,微弱信号检测技术是激光雷达中的关键技术,而处理电路设计直接影响激光雷达的精度和稳定性。本文分析了影响APD探测器阵列工作性能的因素,并设计了一种用于5X5 APD阵列的回波信号处理电路,该电路应用于三维FLASH激光雷达。
2. 雪崩光电二极管阵列
激光雷达的整体性能与雪崩光电二极管阵列的噪声和信噪比密切相关。APD阵列是三维闪光激光雷达的关键组件,其工作状态直接影响系统的整体性能和激光雷达的测量精度。APD阵列的性能可能受到回波能量、反向偏置电压和温度的影响。
雪崩光电二极管(APD)是一种高度灵敏的半导体电子器件,利用光电效应将光转换为电。它在工作时需要高反向偏置电压,反向电压值一般为50V ~ 20V。雪崩光电二极管的雪崩增益M与反向偏置电压U之间的关系可用以下公式近似表示:
$$
M = \frac{1}{1 - \left(\frac{U}{U_{RB}}\right)^n}
$$
在公式中,n 与 PN结 的结构和材料参数相关,$ U_{BR} $ 是 PN结 的击穿电压。由公式 (1) 可知,当反向偏置电压接近 $ U_{BR} $ 时,M 迅速增大;而当 $ U = U_{BR} $ 时,M → ∞,雪崩光电二极管工作在盖革模式,容易引起 p-n 结的击穿。
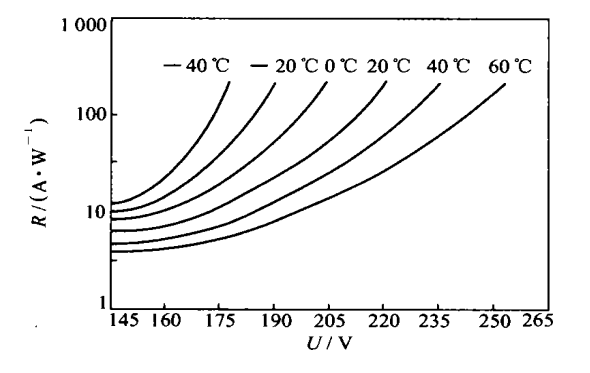
雪崩光电二极管的击穿电压对温度变化非常敏感,如图2所示。从图中可以看出,当温度变化时,雪崩光电二极管的雪崩增益发生了很大变化。
从上述分析可知,雪崩光电二极管工作在反向偏置电压下,偏置电压应可调节,且其电压纹波足够小,以使雪崩光电二极管工作在最佳状态。
在此电路设计中,我们使用了一种微型高压电源模块。该模块可产生0~200V可变电压,经过滤波器后纹波小于0.5%。能够满足雪崩光电二极管偏置电路的要求。
3. 回波信号处理电路
回波信号处理电路由三部分组成:信号采集电路、信号放大电路和电压比较部分[3]。信号采集电路由APD阵列和偏置电路组成,使雪崩光电二极管能够在复杂环境下工作,以实现微弱回波信号的检测。信号放大电路可将光电转换后的光电流转换为电压信号并进行放大;电压比较器电路可将放大后的回波信号进行电平转换,使其满足时间测量电路的电压要求。回波信号处理电路的原理如图3所示。
3.1 反向偏置电路
为了确保雪崩光电二极管能够正常工作,需要配置适当的反向偏置电压。在不同的环境温度下,需要调节合适的偏置电压以达到最佳工作状态。在本电路设计中,采用了一种微型高压电源模块。该模块可产生0~200V的可变电压,经过滤波器后纹波小于0.5%。通过匹配阻容电路的器件参数,设计滤波器电路,并进行PCB板布局与布线,使偏置电路能够满足雪崩光电二极管对纹波的要求。
3.2 跨阻放大器
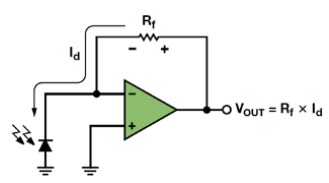
跨阻前置放大器用于将接收到的电流脉冲转换为电压信号,包括核心放大器和反馈电阻,如图4所示。
理想跨阻放大器电路如图4所示。对于理想运算放大器电路,其反相输入端为虚地,光电二极管电流全部流过反馈电阻Rf, Rf 的另一端位于虚地,因此输出电压为 $ R_f \times I_d $。然而,光电二极管放大器电路的设计并不像图4所示那样简单选择
MSO-X 2024A, MY54100557: 2014年12月24日星期三 20:11:30
1 500x1 2 500x1 3 4 -1.400= 50.00=/ 自动? 1 219v .,-
= 安捷伦
::采集 正常
500千样本/秒
T
1
12 .+.y ..r11.1.. 1 r r,
… -A AAA íl i Y
..
y…
.m. ..通道 ..
DC 10.0:1
DC 10.0:1
DC 10.0:1
ru
,4.....-.
.4r,,i,,,r’w ‘,,,I ln-lv,
L^.vi1/i..0 vvv.% vtiw-tir ,M^..ñ,rw
帮助菜单 获取 关于 语言
n Ir n1 Ir
一个简单的运算放大器电路。本文选用了一种高带宽、单电源、差分输出的跨阻前置放大器,其带宽为240兆赫兹。因此,它能够将光电流转换为电压信号,同时保持信号的陡峭边沿。此外,该电路的差分输出具有高的共模抑制比,能有效抑制噪声电路。图5展示了跨阻放大器的工作原理,图6显示了前置放大器的差分输出信号。
3.3 电压放大电路
电压放大电路是放大器电路的主电路,因为前置跨阻放大器电路为差分输出,电压放大电路必须满足差分输入、单端输出的要求。同时,电压放大电路需满足回波信号接收电路的带宽要求。
ADI AD8130 是一款具有高频高共模抑制比的差分转单端放大器。AD8130 是一种差分转单端放大器响应斜率,在 -3分贝时为 1090V/μs,带宽为 155兆赫,具备
MSO-X 2024A, MY54100557: 2015年1月8日 星期四 23:02:10
%- a’ q 2 3 Q 0.0s 23.00/ Auto itimil, 135” 安捷伦
采集
正常
1.00GSa/秒
..通道
DC 10.0:1
DC 10.0:1
DC 1.00:1
DC 1.00:1
T
11
通道 1 [silent)
t7耦合 带宽限制 Fine
DC
反相
r1
探头
MSO-X 2024k MY54100557: 2015年4月7日 星期二 11:42:00
0 © El 0 0.0s 20.00=/ Q
安捷伦
采集 正常
1.00GSa/秒
r
通道
DC 10.0:1
DC 1.00:1
DC 1.00:1
DC 1.00:1
_ /I ,. m
i
通道1菜单 )耦合
DC
带宽限制
n
Fine 反相
r1
探头
110分贝的高频共模抑制比。图7 显示了 AD8130 的输出信号。
3.4 时序判别电路
时序判别电路的主要作用是将激光接收电路输出的脉冲信号作为鉴别器的触发信号,通过改变脉冲形状,为时间间隔测量电路提供输入,以减小测量误差,提高定时精度[5]。
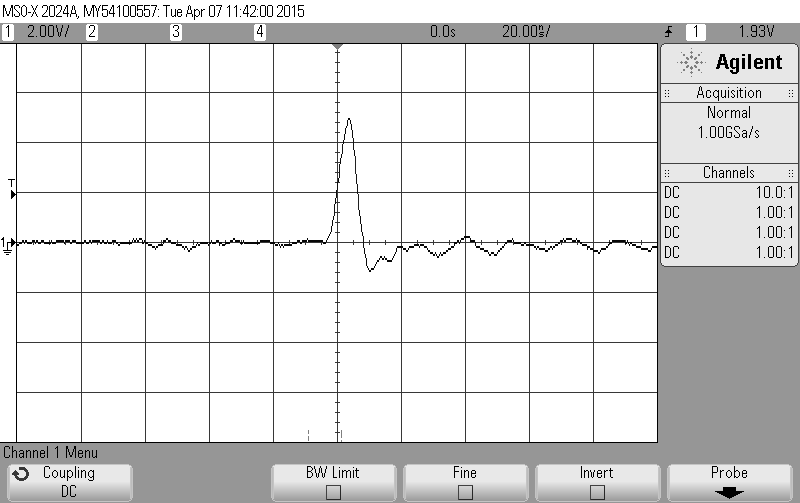
在激光雷达设计中,前沿定时判别法会因幅度校正而产生漂移误差。通过电路中电压放大器输出脉冲信号与差分阈值电平幅度的比较,实现定时信号的时间测量。由于激光脉冲上升沿约为5纳秒,应选用速度适当、传输延迟小的电压比较器来设计前沿定时判别电路。电压比较电路的输出信号如图8所示。
3.5 其他
本文设计了一种用于高频微弱信号的放大电路。该电路对电路内外部噪声非常敏感。同时,电路布线可视为高频信号,会涉及反射、串扰和过冲问题[6]。并且由于激光器与接收电路位于同一位置,激光发射机在纳秒级数十安培峰峰值电流范围内工作时会产生强烈的电磁干扰。接收电路与电磁干扰频带重叠,因此会受到电磁干扰的影响。
由于这些原因,我们应注意以下几点:1)适当的布线宽度;2)合适的封装电容和电阻;3)合理安排器件位置;4)使用高电阻的绝缘基材;5)采用低阻抗电路。
4 实验
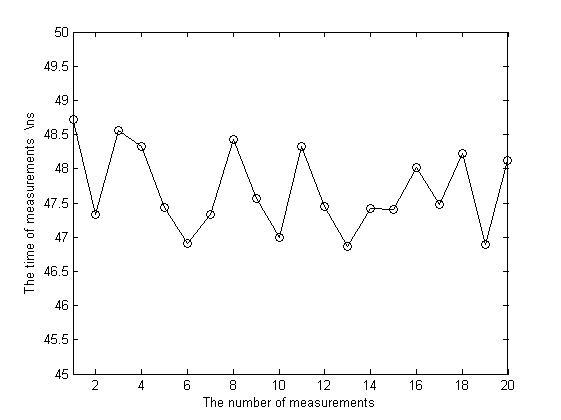
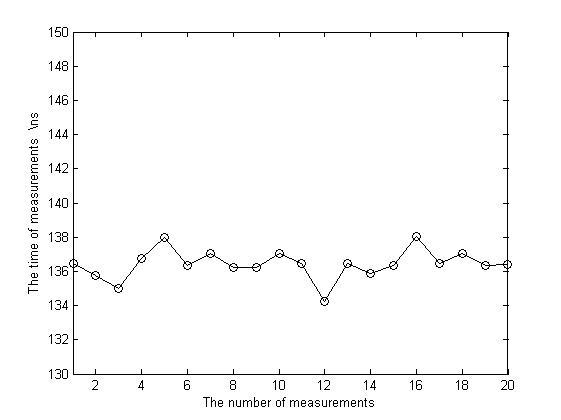
本文中,为了验证电路设计,我们采用了GD5210Y-500-3型硅雪崩光电二极管。光源采用波长为905纳米、半高宽10纳秒、峰值功率138瓦的激光器。定时模块采用ACAM公司生产的TDC-GP21时间数字转换芯片。进行了7米和20米的目标测距实验。图9为靶标在7米处的测量时间,图10为靶标在20米处的测量时间。由图9、图10可知,信号处理电路能够提供稳定的TDC信号触发模块,且电路抖动在1纳秒以内。同时存在定时漂移误差,经误差补偿后可消除该误差。
5 结论
本文结合APD探测器的工作原理,分析了APD处理电路的组成、原理、设计思路以及基于APD阵列的激光雷达回波信号处理电路的设计。最后,结合信号处理电路中噪声和电磁干扰的实际问题,提出了PCB制造过程中的一些注意事项。实验表明,目标距离设计电路在10m~100m范围内对脉冲回波信号的采集放大具有良好的效果。该信号处理电路能够满足APD微弱信号检测的要求,可为定时电路提供稳定的触发电平。


















 714
714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









