



11章 汽车应用中的高级传感器解决方案
保罗·达布拉莫、阿尔贝托·马乔尼、朱塞佩·帕塞蒂和弗朗切斯科·廷费纳
11.1 引言
传感器是一种输入为物理现象、输出为该物理现象定量测量的装置。在电子学领域,传感器提供了物理量或化学量与电信号之间的接口。根据传感器的输出是所关注的物理量本身,还是作为其他量的信息载体,可提供直接或间接测量。位置、速度、线位移和角位移、电流等物理量是可进行间接测量的例子。
如今,执行必要模拟和数字信号处理的传感器信号调理电子电路通常由集成电路提供,在许多情况下,传感器本身也使用集成电路技术制造(要么在信号处理芯片上,要么在单独的芯片上)。具有集成电子器件的传感器在人类广泛活动的众多应用中提供了强有力的支持,特别是在汽车环境中[1]。
电子学在汽车中的重要性不断提高,现代汽车中电子设备数量的增长在很大程度上是由于可靠车辆运行以及实现更高效率、安全性和舒适性所需的大 量传感器[2] 。事实上,带有集成电子器件的传感器参与发动机控制,并有助于提高性能、增加效率、降低燃油消耗并减少有害排放,以满足环境污染标准规定的严格排放限值。它们还几乎用于车辆的所有安全系统,无论是主动型安全系统,用于帮助避免事故,还是被动型安全系统,用于减轻事故发生后的影响。特别是传感器在所有用于碰撞避免的主动安全过程(例如制动辅助、牵引力、转向与稳定性控制)中起着至关重要的作用,在所有主动式高级驾驶辅助系统中也是如此,同时还应用于一些被动式耐撞性装置(如安全气囊)。此外,还有许多关键的舒适性组件和许多理想的舒适性功能,通过感知环境并与乘客互动来实现操作(例如座椅占用检测、手势感应)。
无论其功能如何,在汽车应用中,传感器都必须在电子元器件最严酷的环境中运行,同时确保出色的可靠性和耐久性水平。在电气约束方面,传感器尤其需要满足日益严格的电磁兼容性(EMC)要求:它们在暴露于其他设备产生的强电磁场时必须能正常工作,同时还必须以极低水平发射辐射和传导干扰,以免影响车辆上的其他电子设备。为确保这一点,所有用于车辆的传感器解决方案都必须经过多项严格的EMC测试,并满足汽车原始设备制造商和国际标准(如CISPR25、IEC61967、ISO7637和ISO11452等主要标准)规定的限值。
在汽车中需要监测的物理和化学量示例包括:接近检测、位置、线速度和旋转速度、线位移和角位移、加速度、扭矩、温度、压力、电流、湿度、气流、液位、液体浓度、特定气体浓度。
许多先进的传感器技术被用于感知这些量。其中最有趣的一种是基于测量两个电极之间因需间接感知的量的变化而引起的电容变化。采用这种测量原理的换能器通常被称为电容式传感器,它们能够检测上述许多物理和化学量[3, 4]。
电容式传感器的一个关键优势在于,它可以在传感装置与机械系统之间无接触的情况下进行间接测量。这使得其能够以相对简单、坚固且低成本的结构实现高性能,因此在汽车领域得到广泛应用。
另一方面,根据架构的不同,它们可能对电磁场非常敏感,或者可能成为干扰的有效发射源。特别是某些电容式传感器(例如用于座椅占用检测的传感器),其中至少一个电极需要具有显著的物理延伸,并充当天线,接收外部电磁场和/或发射干扰。
这对这些传感器的信号调理电子电路设计提出了巨大挑战:读出电路必须能够承受并抑制传感器电极收集到的不希望的电磁场,同时驱动电路需要尽量减少不必要的电磁成分的发射。接下来的章节将介绍几种电容式传感器接口的架构,以及为实现汽车应用所要求的优异电磁抗扰度和发射性能而需要考虑的设计方面。
11.2 电容式传感器接口的架构
根据传感器配置和传感器电容的特性,可能存在不同的架构。
传感器可以是(图 11.1)“接地”的,即两个端子中有一个永久接地,或“浮地”的,即两个端子均可访问且可控。在选择传感器接口架构时,必须考虑这一约束。
此外,传感器在电容范围、偏移值、电阻分量(串联或并联)、频率响应等方面可能具有不同的特性。根据这些特性以及每个应用的特定要求,必须选择具有最佳权衡的传感器接口架构。
测量电容最简单的方法是使用恒定电流对其进行充电,并测量其充电至参考电压所需的时间[5, 6]。图11.2展示了该原理实现。
电容值 $ C_{\text{sense}} $ 可通过测量“CLK”信号的下降沿与“Comp_out”信号的上升沿之间的时间延迟获得:
$$
C_{\text{sense}} = \frac{I_{\text{bias}} \cdot \text{Delay}}{V_{\text{Ref}}}
\quad (11.1)
$$
通过使用参考电容和对称电路,可以提高该架构的鲁棒性。这样,由于元件变化(如偏置电流和参考电压)引起的误差可以大幅减少,因为共模误差不会影响测量结果。图11.3展示了改进后的架构。在此架构中,电容值可以从“OUT”信号的占空比推导得出:
$$
\text{DutyCycle} = \frac{C_{\text{sense}}}{C_{\text{sense}} + C_{\text{Ref}}}
\quad (11.2)
$$
上述方法的主要优点是低复杂度、极低功耗和快速测量。
遗憾的是,在电磁抗扰度方面,电极上的任何干扰都会影响测量结果,只能通过多次读数取平均值来尽量减小这种影响,但这会对响应时间和功耗产生负面影响。
在电磁发射方面,充放电斜坡的速度应尽可能低,但这受到所需响应时间的约束;此外,充电斜坡的斜率越低,前端对内部噪声(高抖动)和外部干扰源(低抗扰度)的敏感性就越高。充放电斜坡的有效范围还受到传感器寄生电阻(串联和并联)和电感元件的额外约束。
一种更复杂的架构利用了Sigma‐Delta转换器,其中传感器电容作为开关电容放大器中的调制器电容之一(图11.4)[7, 8]。
传感器电容值可根据公式11.3计算,其中M是比较器输出端的平均值,OSR是Sigma‐Delta转换器的过采样率:
$$
C_{\text{sense}} = \frac{M}{\text{OSR}} C_{\text{ref}}
\quad (11.3)
$$
该架构的主要优势是低噪声和高动态范围。通过选择适当的过采样率,可以实现精度、建立时间和功耗之间的理想权衡。
在电磁抗扰度方面,Sigma‐Delta提供了良好的滤波性能,而Csense端子的快速切换对于发射仍然至关重要。
这种架构的主要缺点是需要使用浮地传感器,且电容器的两个端子都必须能够被驱动。而在许多应用(如接近检测和手势检测)中,这种情况通常无法满足。
为了在无需使用浮地传感器的情况下实现最佳EMC性能,可以采用图 11.5所示的架构,该架构通过施加已知交流电压并利用同步解调检测驱动器提供的正交电流来测量传感器阻抗的电容分量。
“驱动路径”提供在激励频率下驱动传感器电极所需的电流(激励频率根据应用需求和传感器特性选择),同时将杂散发热谐波含量保持在最低水平。
驱动器提供的电流的正交分量由“拾取路径”检测,该路径通过同步解调和适当滤波抑制了潜在干扰信号。
接下来的两章将重点介绍在此架构中需要考虑的具体设计方面,以分别实现最佳的电磁发射和抗扰度性能。
11.3 电磁发射的设计考虑
就发射而言,关键部分是产生电极正弦激励的驱动路径:一方面,驱动器注入传感器的电磁能量会由电极辐射出去;另一方面,驱动器从电源吸收的交流电流可能通过相应的导线引起传导辐射。
理想情况下,纯正弦激励信号会将辐射频谱限制在选定的工作频率处的单音上。这可以通过使用具有高谱纯度的振荡器作为信号源来很好地实现。
然而,该应用要求在宽范围内以细步长对工作频率进行可编程性调节,这将导致此类实现的面积过大(需要多个带有大型调谐结构的振荡器)。
为了在可接受的硅面积内满足这些要求,激励信号通过数字合成和正弦DAC生成。
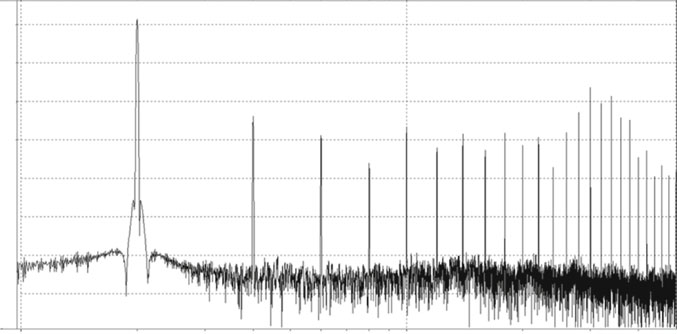
正弦DAC能够很好地近似正弦波,但由于存在非理想性(例如量化、电平失配、开关瞬态),输出信号的频谱中包含所选工作频率的谐波分量,可通过在DAC输出与电极驱动器输入之间添加低通滤波器来衰减这些谐波分量。
对于特定应用,为了在保持电流消耗和硅面积处于可接受水平的同时实现所需的谐波含量,需要采用16相DAC(图11.6和 11.7)。在DAC布局中也必须特别注意,以尽量减少上述非理想性的来源。
用于生成DAC相位的高频时钟是通过一个多相(此处为16相)锁相环锁定在基波激励频率上获得的;若使用一个工作在正弦波频率16倍的振荡器,则需要更大的电流,从而对传导辐射产生不利影响。
正弦DAC输出是一种低功率信号,无法直接驱动电极。需要一个输出驱动器来提供所需电流(在20兆赫频率下,以400 mV驱动100皮法传感器时需要5 mA电流)。为了避免引入额外的不希望的谐波分量,驱动器的设计必须确保其线性工作区(避免输入和输出级的饱和效应)覆盖正弦信号的动态范围,并在工艺、电源电压和温度变化范围内留有足够的裕量。
最后但同样重要的是,必须尽量减少集成电路内以不同频率运行的模块之间的任何寄生耦合。这些寄生耦合会引入串扰,可能在两个或多个频率之间产生互调产物,从而在辐射频谱中产生额外的分量:例如,电极激励频率与固定数字时钟频率之间的寄生耦合将产生一个不希望的分量,该分量并非激励信号本身的谐波。
它可能由多种来源引起(例如,电源和接地连接的寄生电阻、通过衬底或金属布线的寄生电容耦合、通过共用偏置模块的寄生耦合),因此必须在原理图和物理设计中采取适当措施:合理设计参考电压和偏置电流的生成与分配方案,从焊盘到每个敏感模块采用专用电源和接地布线,对敏感信号布线进行屏蔽。
通过电源引脚由驱动路径以及其他模块(如数字部分)产生的传导辐射也是一个需要关注的问题,可以通过使用低压差稳压器将12 V电池电压转换为5 V电源,并具备足够的负载调整率,以抑制集成电路电源电流中的所有高频分量。
激励频率本身的水平也可能超过允许的发射限值。在这种情况下,可以采用扩频方案,利用周期函数来改变工作频率,从而使信号能量分布在更宽带宽上,并降低峰值发射水平。使用此方法时,拾取路径(尤其是ADC采样时钟)需要与周期性调制信号同步,以避免产生测量纹波。
11.4 电磁抗扰度设计考虑
干扰可以通过感应电极或电源进入集成电路。拾取路径的主要功能正是放大和隔离信号分量(与传感器激励信号正交的交流电流),然后将其转换到数字域以进行进一步处理。
关于由传感电极直接采集的干扰,该架构利用频域中的固有选择性来抑制不同频率或与激励信号不相干的不希望的输入信号。
然而,只有在设计中采取了充分措施以确保驱动和拾取路径的所有模块即使在存在最恶劣外部干扰源的情况下也不会饱和时,前面这句话才成立。
特别是,对于以20兆赫频率和400毫伏幅度工作的100皮法传感器,其电极驱动器的工作电流等于:
$$
Z_{\text{sense}} = \frac{1}{2\pi f C} = \frac{1}{2\pi \cdot 20\,\text{M} \cdot 100\,\text{p}} = 80\,\Omega
\quad (11.4)
$$
$$
I_{\text{out}} = \frac{V_{\text{out}}}{Z_{\text{sense}}} = \frac{400\,\text{m}}{80} = 5\,\text{mA}
\quad (11.5)
$$
但在给定应用的实验测量中显示,在电磁抗扰度测试期间,传感器电极上可能感应出高达15毫安的电流,是工作电流的三倍!这意味着,为了在电磁抗扰度方面实现最佳性能,驱动器的尺寸设计必须能够处理高达20毫安的电流而不发生饱和。
同样的考虑也适用于整个拾取路径,该路径必须能够检测到这种电流,同时保持线性响应。只有在这些条件下,同步解调器及相关滤波器的高选择性才能在正确提取传感器激励电流幅度的同时,有效抑制干扰信号。
通过电源进入集成电路的干扰,需使用在相关频率范围内具有足够电源抑制比的低压差稳压器来生成各个集成电路模块的电源电压,且这些电源电压也需针对电源抑制比进行优化。此外,如前所述,在原理图和物理设计中也必须特别注意,以避免模块之间的串扰。
当然,必须确定拾取路径的选择性与其他应用需求(例如响应时间、噪声、温漂)之间最合适的权衡。在特定应用中,可实现个位数的飞法测量误差,转换时间低于 100 μ秒,电流消耗低于 100 μA(在低功耗模式下,汽车停放时所需)。
最后但同样重要的是,如果拾取接收频带内存在一个较强但为窄带干扰源,可以采用跳频方案,动态地将激励频率切换到远离该干扰信号的另一个频率。
11.5 结论
传感器在人类活动的众多应用领域中正得到越来越广泛的使用,尤其是在汽车环境中。
其中,电容式传感器发挥着重要作用,因为它们能够以非接触式实现的优势间接监测许多不同的物理量。
本文介绍了多种电容式传感器接口的架构,特别关注了为实现汽车应用所要求的优异电磁抗扰度和发射性能而需要考虑的设计方面。

















 1074
1074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









