



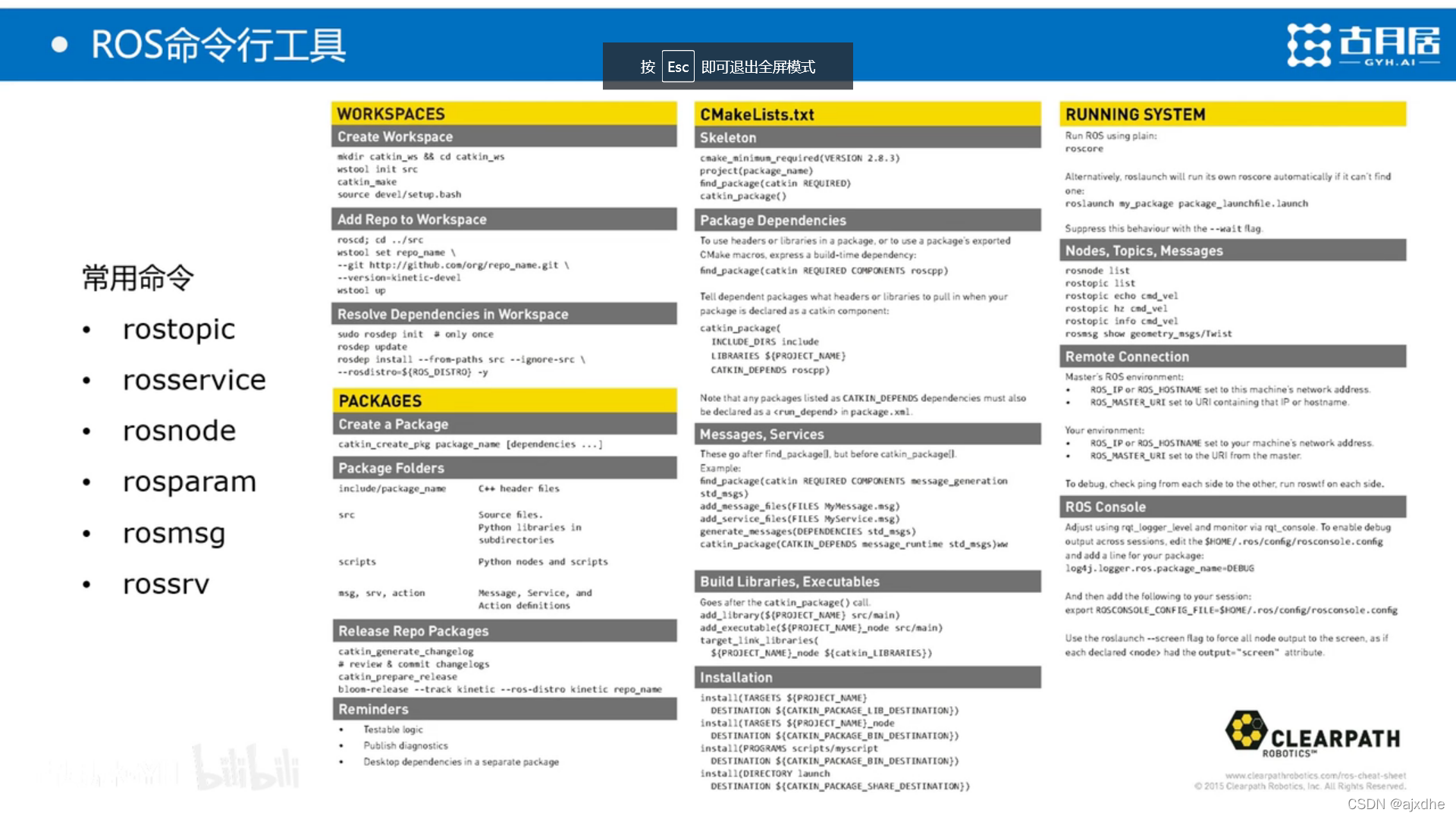
常用命令
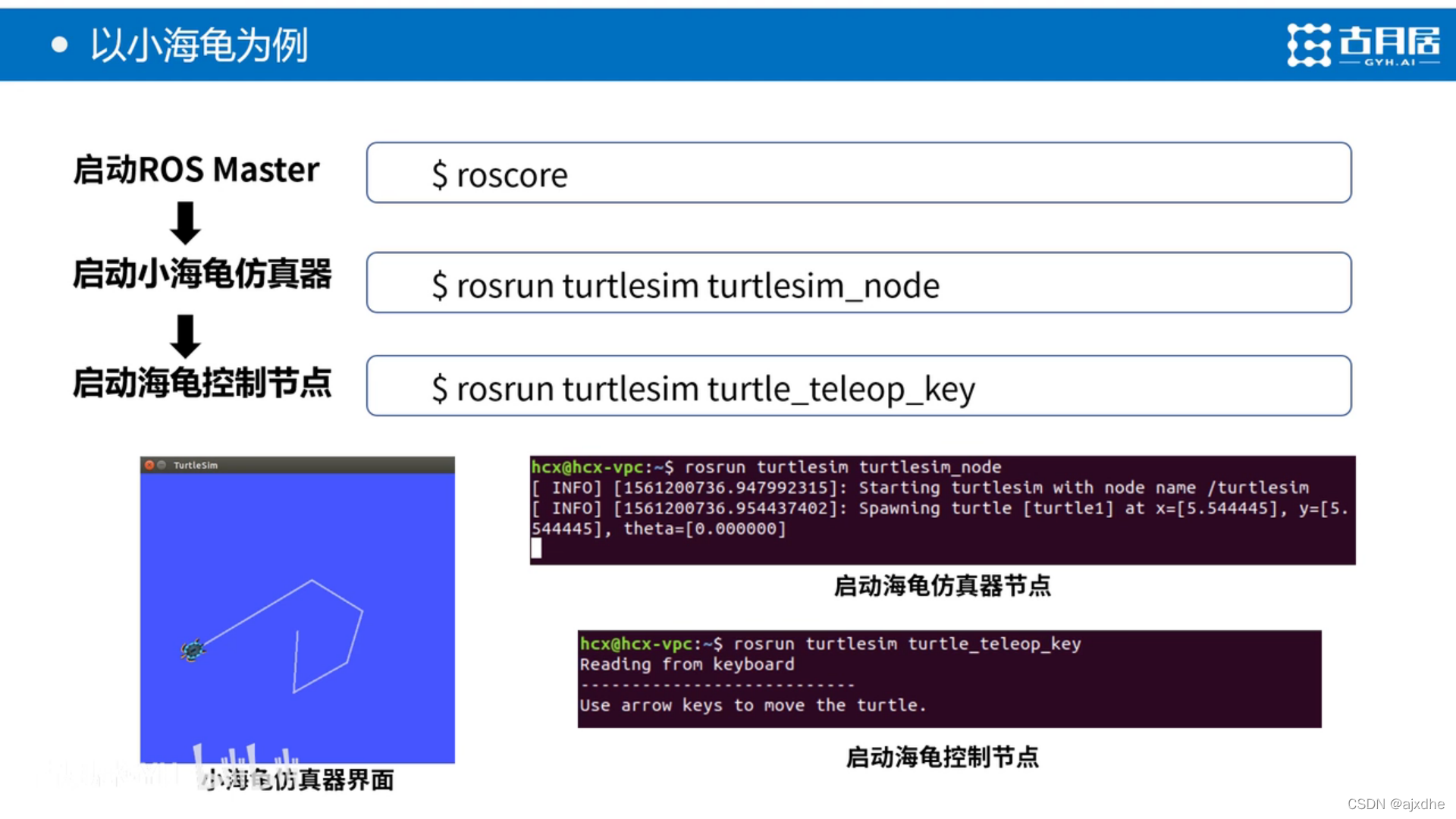
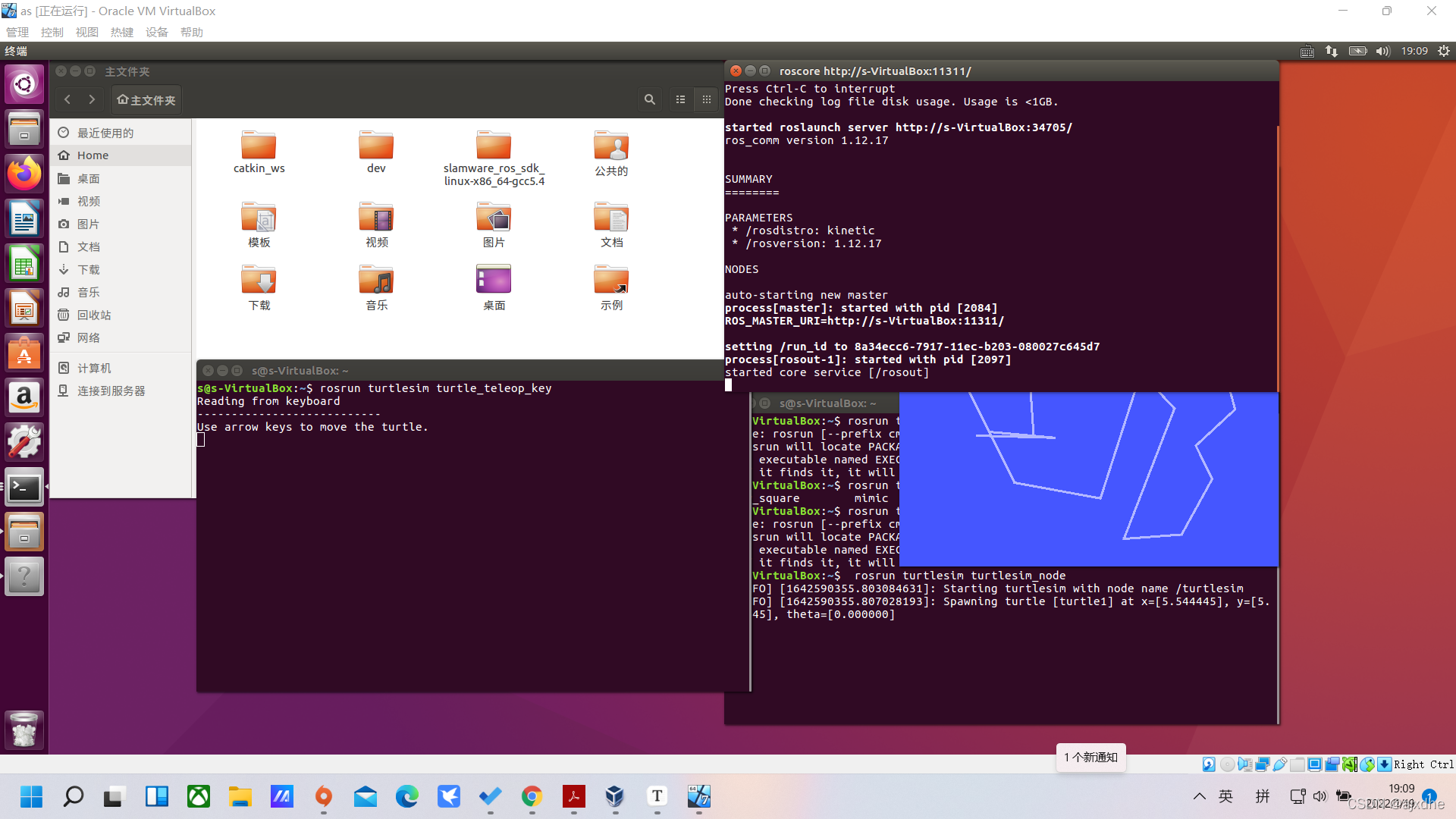
海龟
rqt_graph
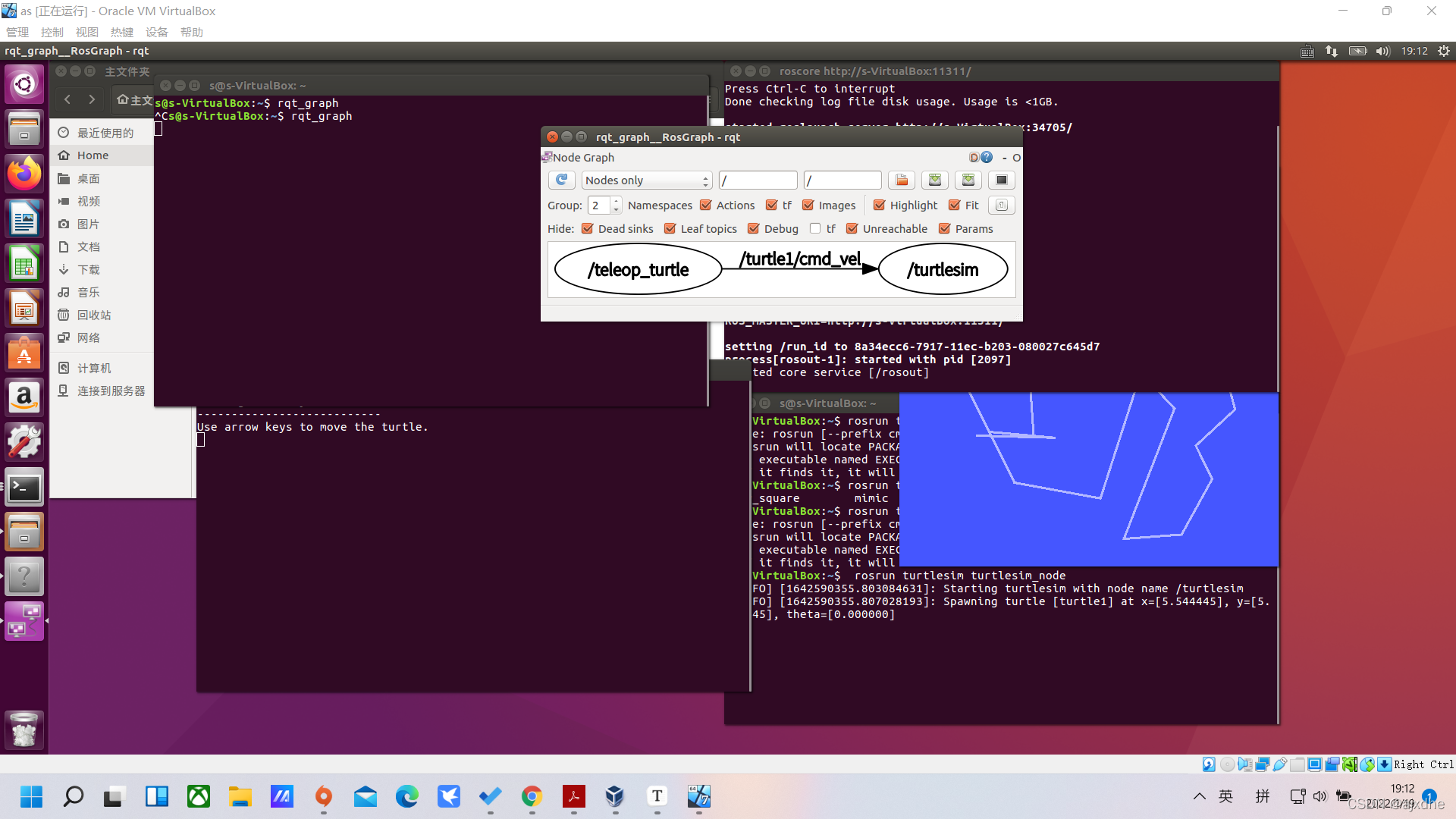
rqt_graph 显示连接关系以看到系统全貌
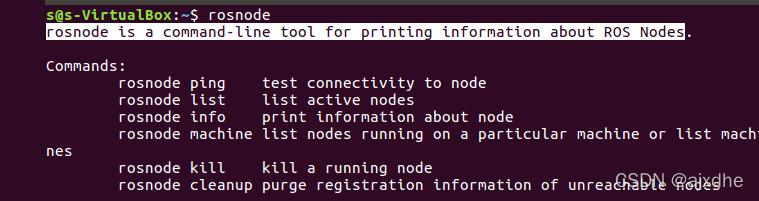
rosnode
rosnode is a command_line tool for printing information about ROS Nodes
具体指令如下
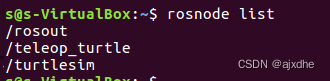
rosnode list
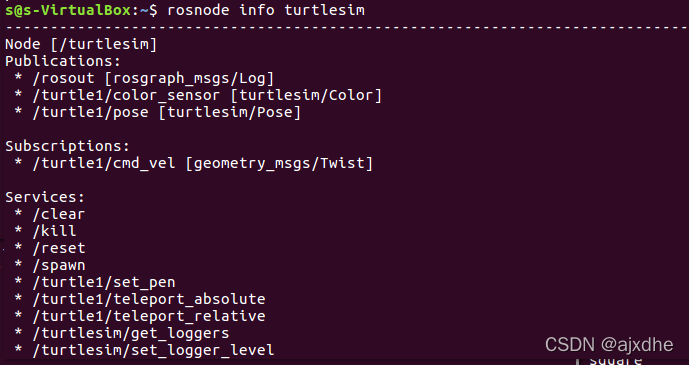
rosnode info
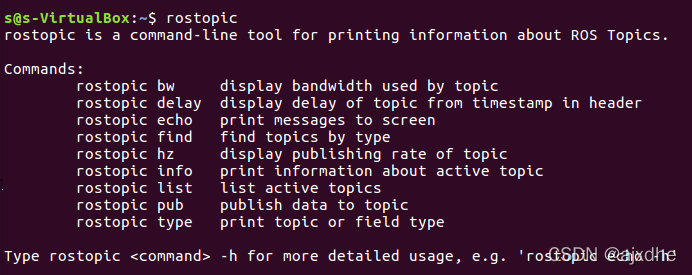
rostopic
改变海龟位置
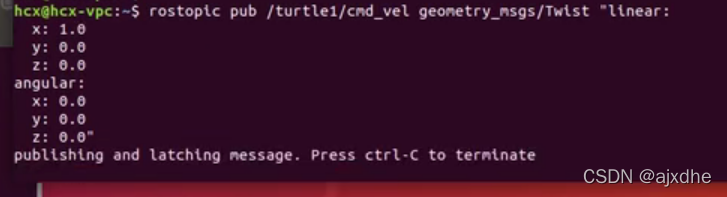
这里可以对坐标轴数据进行修改 修改后按回车即可执行
这个动作只能执行一次若要多次执行则 要加上 -r frequency
例如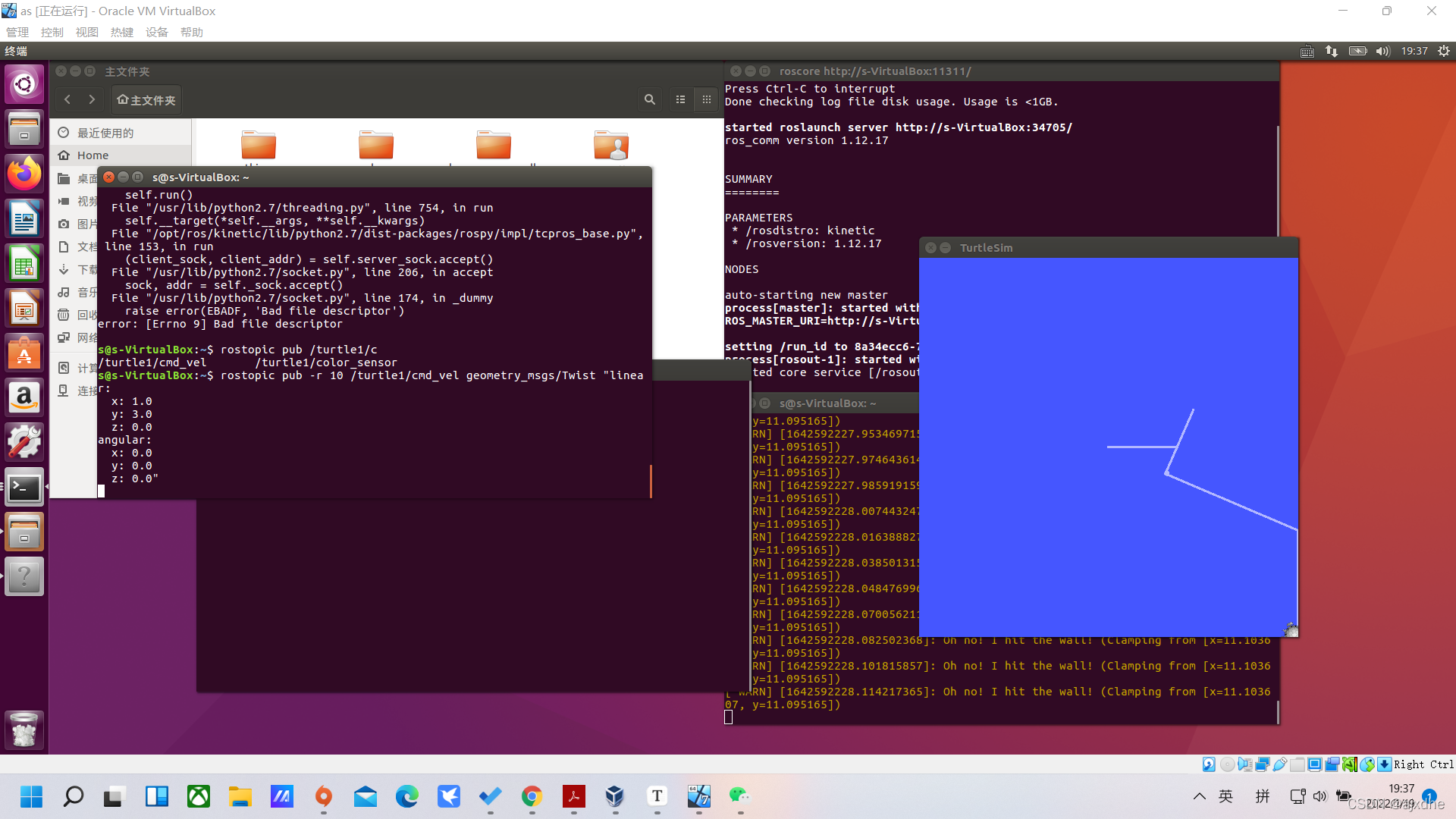
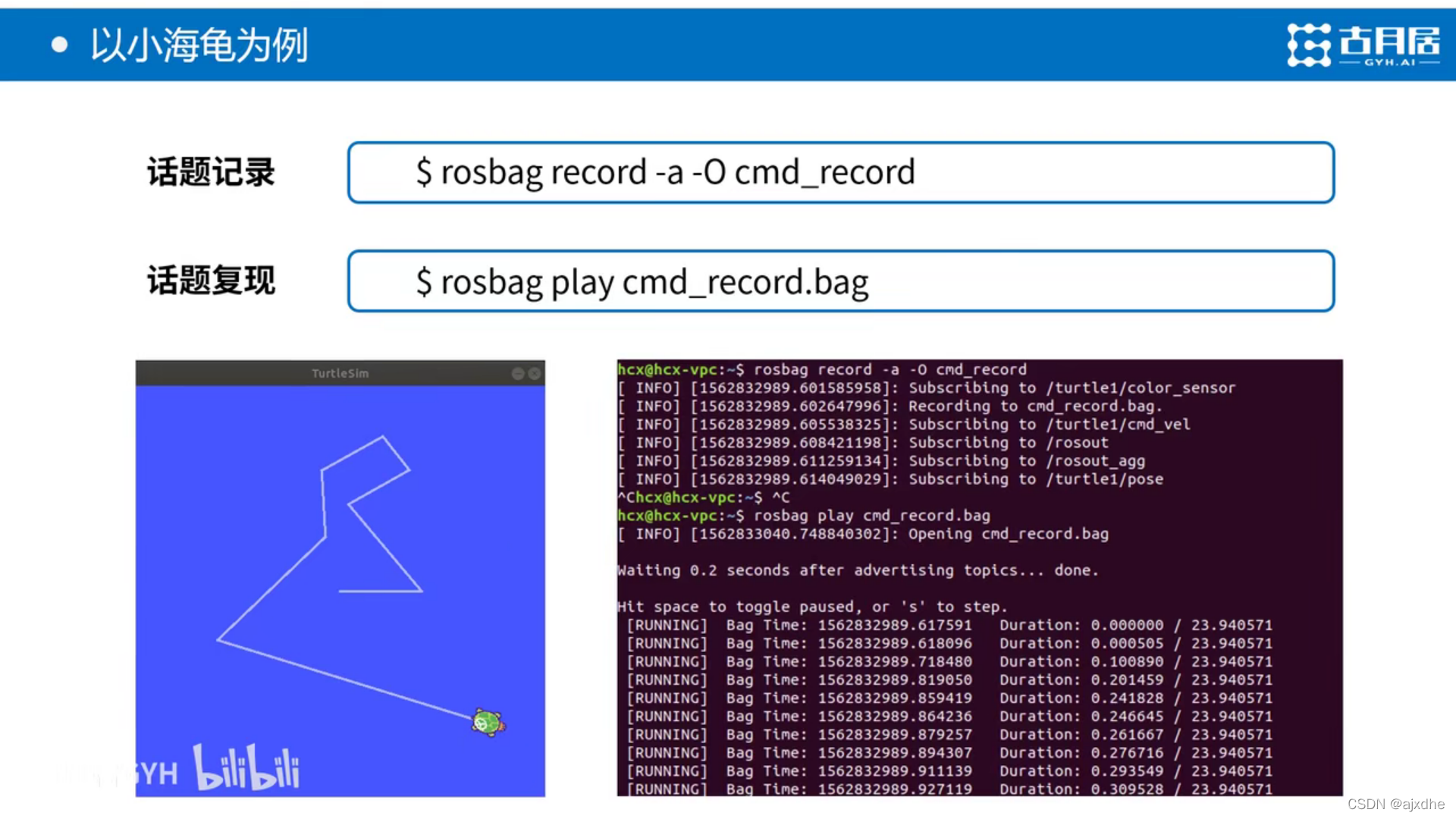
话题复现与记录
rqt_graph 显示连接关系以看到系统全貌
rosnode is a command_line tool for printing information about ROS Nodes
具体指令如下
这里可以对坐标轴数据进行修改 修改后按回车即可执行
这个动作只能执行一次若要多次执行则 要加上 -r frequency
例如
 262
1412
374
262
1412
374

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























