




 博主在安装cartographer环境并尝试使用rplidar与cartographer_ros进行地图云生成时遇到错误,着重讲述了遇到的lua参数错误和解决步骤,寻求技术大神帮助。
博主在安装cartographer环境并尝试使用rplidar与cartographer_ros进行地图云生成时遇到错误,着重讲述了遇到的lua参数错误和解决步骤,寻求技术大神帮助。
本人安装cartographer环境时是参考此文而操作的
Rplidar学习(五)—— rplidar使用cartographer_ros进行地图云生成 - Blue Mountain - 博客园
前面都基本没有报错(就是source zsh文件source不了改成source bash文件)
运行到
roslaunch cartographer_ros demo_revo_lds.launch
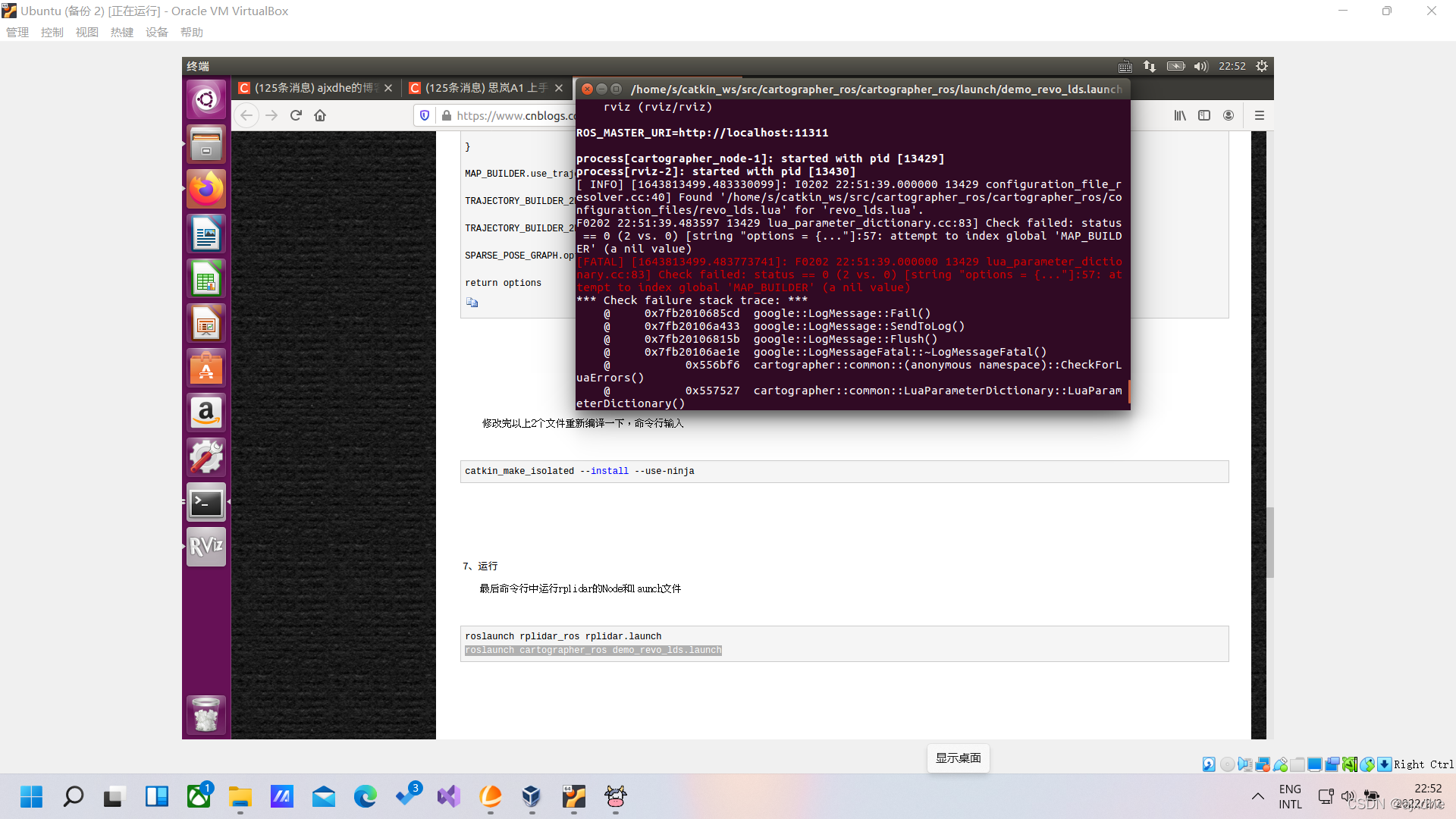
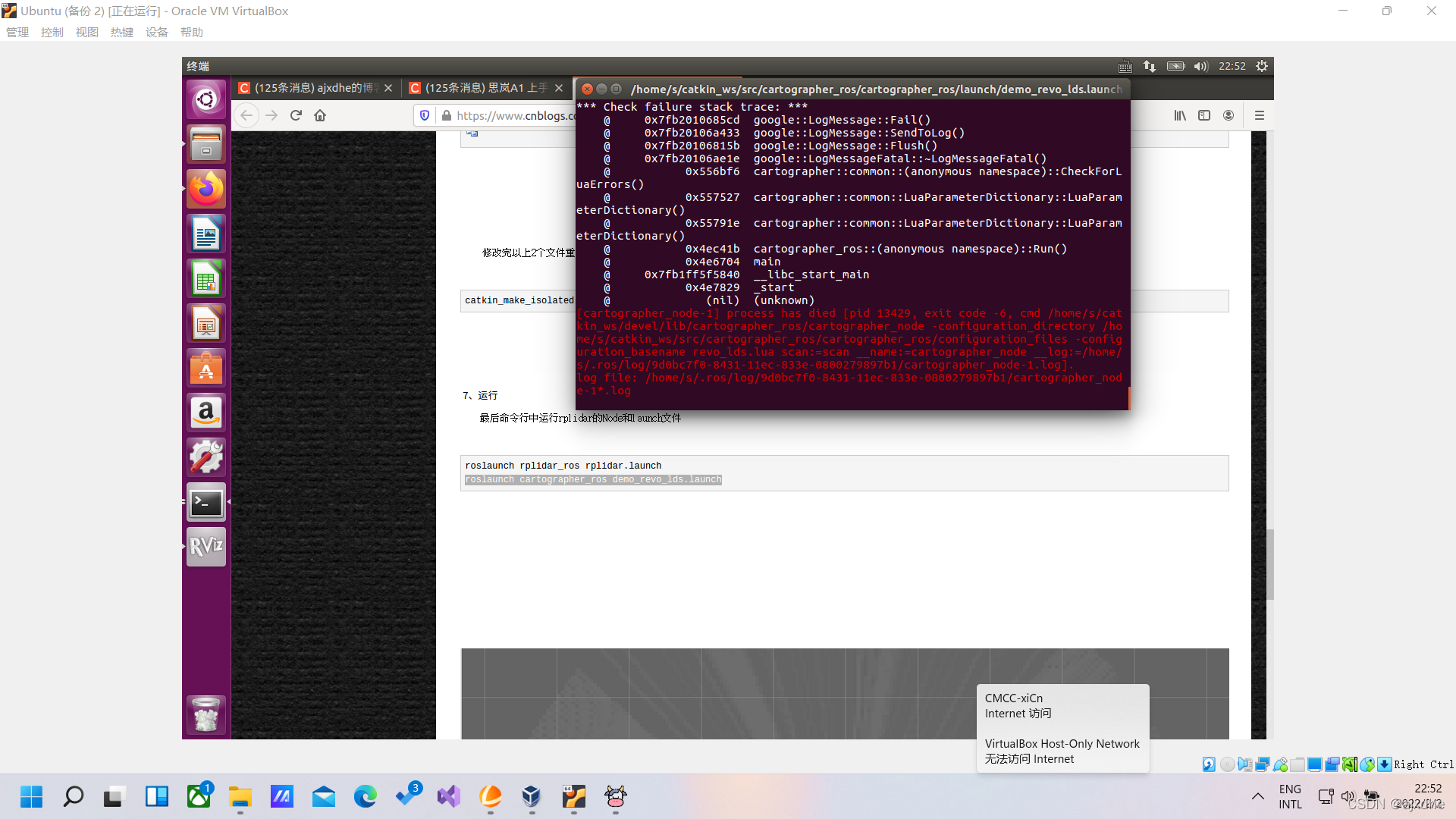
出现错误
... logging to /home/s/.ros/log/1fb7221a-8439-11ec-b929-0800279897b1/roslaunch-s-VirtualBox-2660.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8053
8053

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









