



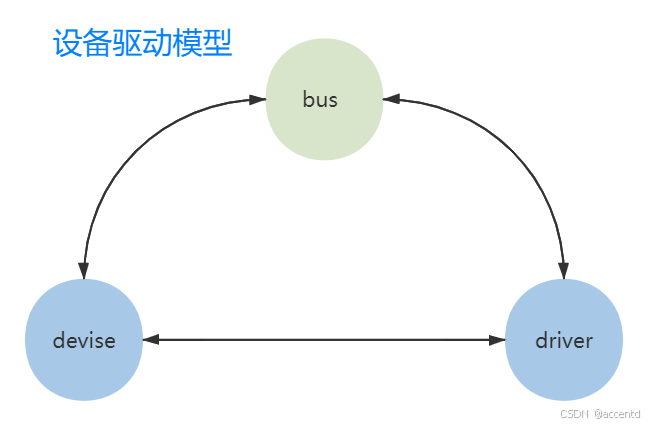
设备框架
在linux系统中,为了提高代码利用率,引入了设备驱动模型分层的概念,将代码分为驱动和设备,并利用总线对设备和驱动进行管理。SPI子系统便是由SPI总线对设备和驱动进行管理。
SPI总线注册
首先检查Linux下Menuconfig中SPI总线是否开启,具体目录为->device drivers->spi support,打开Freescale i.MX SPI controllers。
打开后,Linux系统会在开机时进行SPI总线注册。
static int __init spi_init(void)
{
int status;
buf = kmalloc(SPI_BUFSIZ, GFP_KERNEL);
if (!buf) {
status = -ENOMEM;
goto err0;
}
status = bus_register(&spi_bus_type);
if (status < 0)
goto err1;
status = class_register(&spi_master_class);
if (status < 0)
goto err2;
if (IS_ENABLED(CONFIG_OF_DYNAMIC))
WARN_ON(of_reconfig_notifier_register(&spi_of_notifier));
return 0;
err2:
bus_unregister(&spi_bus_type);
err1:
kfree(buf);
buf = NULL;
err0:
return status;
}
在这个函数中,总线注册成功后,会在sys/bus 下面生成一个spi 总线,然后在系统中新增一个设备类,sys/class/目录下会可以找到spi_master 类。
设备匹配
struct bus_type spi_bus_type = {
.name = "spi",
.dev_groups = spi_dev_groups,
.match = spi_match_device,
.uevent = spi_uevent,
};
当属于spi_bus_type的device或者driver注册时,会调用spi_match_device进行匹配。
static int spi_match_device(struct device *dev, struct device_driver *drv)
{
const struct spi_device *spi = to_spi_device(dev);
const struct spi_driver *sdrv = to_spi_driver(drv);
/* Attempt an OF style match */
if (of_driver_match_device(dev, drv))
return 1;
/* Then try ACPI */
if (acpi_driver_match_device(dev, drv))
return 1;
if (sdrv->id_table)
return !!spi_match_id(sdrv->id_table, spi);
return strcmp(spi->modalias, drv->name) == 0;
}
- of_driver_match_device为第一种匹配方法,它会将设备驱动中的of_match_table与设备树中的compatible属性进行匹配;
- acpi_driver_match_device为第二种匹配方法,它会将acpi_match_table的compatible和device的of_node的compatible匹配;
- spi_match_id会比较spi设备名字和spi_device_id的name属性相等;
- 最后,会比较spi_device中modalias成员和device_driver中的name成员变量是否相等。
主机驱动
IMX6ULL共有4个spi控制器,在设备树文件中找到以下内容:
ecspi3: ecspi@02010000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "fsl,imx6ul-ecspi", "fsl,imx51-ecspi";
reg = <0x02010000 0x4000>;
interrupts = <GIC_SPI 33 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_ECSPI3>,
<&clks IMX6UL_CLK_ECSPI3>;
clock-names = "ipg", "per";
dmas = <&sdma 7 7 1>, <&sdma 8 7 2>;
dma-names = "rx", "tx";
status = "disabled";
};
该设备树的初始化代码在->drivers->spi->spi-imx.c中
static struct platform_driver spi_imx_driver = {
.driver = {
.name = DRIVER_NAME,
.of_match_table = spi_imx_dt_ids,
.pm = IMX_SPI_PM,
},
.id_table = spi_imx_devtype,
.probe = spi_imx_probe,
.remove = spi_imx_remove,
};
module_platform_driver(spi_imx_driver);
可以看出,虽然SPI总线是bus_type,但是spi设备驱动仍是platform_driver,其中of_match_table为
static const struct of_device_id spi_imx_dt_ids[] = {
...
{ .compatible = "fsl,imx6ul-ecspi", .data = &imx6ul_ecspi_devtype_data, },
{ /* sentinel */ }
};
当匹配成功后,会调用probe函数spi_imx_probe并初始化spi_master
struct device_node *np = pdev->dev.of_node;
const struct of_device_id *of_id =
of_match_device(spi_imx_dt_ids, &pdev->dev);
struct spi_imx_master *mxc_platform_info =
dev_get_platdata(&pdev->dev);
struct spi_master *master;
struct spi_imx_data *spi_imx;
struct resource *res;
int i, ret, num_cs, irq;
if (!np && !mxc_platform_info) {
dev_err(&pdev->dev, "can't get the platform data\n");
return -EINVAL;
}
ret = of_property_read_u32(np, "fsl,spi-num-chipselects", &num_cs);
if (ret < 0) {
if (mxc_platform_info)
num_cs = mxc_platform_info->num_chipselect;
else
return ret;
}
master = spi_alloc_master(&pdev->dev,
sizeof(struct spi_imx_data) + sizeof(int) * num_cs);
if (!master)
return -ENOMEM;
将spi_master指向bitbang并设置CS个数,初始化传输函数引脚等
spi_imx = spi_master_get_devdata(master);
spi_imx->bitbang.master = master;
for (i = 0; i < master->num_chipselect; i++) {
int cs_gpio = of_get_named_gpio(np, "cs-gpios", i);
if (!gpio_is_valid(cs_gpio) && mxc_platform_info)
cs_gpio = mxc_platform_info->chipselect[i];
spi_imx->chipselect[i] = cs_gpio;
if (!gpio_is_valid(cs_gpio))
continue;
ret = devm_gpio_request(&pdev->dev, spi_imx->chipselect[i],
DRIVER_NAME);
if (ret) {
dev_err(&pdev->dev, "can't get cs gpios\n");
goto out_master_put;
}
}
spi_imx->bitbang.chipselect = spi_imx_chipselect;
spi_imx->bitbang.setup_transfer = spi_imx_setupxfer;
spi_imx->bitbang.txrx_bufs = spi_imx_transfer;
spi_imx->bitbang.master->setup = spi_imx_setup;
spi_imx->bitbang.master->cleanup = spi_imx_cleanup;
spi_imx->bitbang.master->prepare_message = spi_imx_prepare_message;
spi_imx->bitbang.master->unprepare_message = spi_imx_unprepare_message;
spi_imx->bitbang.master->mode_bits = SPI_CPOL | SPI_CPHA | SPI_CS_HIGH;
最后,调用spi_bitbang_start函数,该函数会调用spi_register_master函数,注册spi_master。
int spi_register_master(struct spi_master *master) {
...
status = of_spi_register_master(master);
if (status)
return status;
...
dev_set_name(&master->dev, "spi%u", master->bus_num);
status = device_add(&master->dev);
if (status < 0)
goto done;
dev_dbg(dev, "registered master %s%s\n", dev_name(&master->dev),
dynamic ? " (dynamic)" : "");
if (master->transfer)
dev_info(dev, "master is unqueued, this is deprecated\n");
else {
status = spi_master_initialize_queue(master);
if (status) {
device_del(&master->dev);
goto done;
}
}
...
mutex_lock(&board_lock);
list_add_tail(&master->list, &spi_master_list);
list_for_each_entry(bi, &board_list, list)
spi_match_master_to_boardinfo(master, &bi->board_info);
mutex_unlock(&board_lock);
...
of_register_spi_devices(master);
...
done:
return status;
}
该函数会判断初始化片选引脚是否添加成功,并判断spi_master是否设置了transfer函数,最后,其会将master加入链表中并注册spi设备信息。
数据传输流程
从前面的分析中不难看出spi数据传输函数为spi_imx_transfer,该函数需要spi_device和spi_transfer结构体,该结构体的具体内容如下:
struct spi_device {
struct device dev; /*spi控制器对应的device结构
struct spi_master *master; /*设备使用的master结构,挂在哪个主控制器下*/
u32 max_speed_hz; /*通讯时钟最大频率*/
u8 chip_select; /*片选号,每个master支持多个spi_device */
u8 mode;
#define SPI_CPHA 0x01 /* clock phase */
#define SPI_CPOL 0x02 /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH 0x04 /* chipselect active high? */
#define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
#define SPI_3WIRE 0x10 /* SI/SO signals shared */
#define SPI_LOOP 0x20 /* loopback mode */
#define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
#define SPI_READY 0x80 /* slave pulls low to pause */
u8 bits_per_word; /*每个字长的比特数,默认是8*/
int irq;
void *controller_state; /*控制器状态*/
void *controller_data; /*控制器数据*/
char modalias[SPI_NAME_SIZE]; /* 设备驱动的名字 */
int cs_gpio; /* chip select gpio */
};
一个device代表一个物理意义上的spi设备。
struct spi_transfer {
/* it's ok if tx_buf == rx_buf (right?)
* for MicroWire, one buffer must be null
* buffers must work with dma_*map_single() calls, unless
* spi_message.is_dma_mapped reports a pre-existing mapping
*/
const void *tx_buf; /*发送缓冲区*/
void *rx_buf; /*接收缓冲区*/
unsigned len; /*缓冲区长度,tx和rx的大小(字节数)。指它们各自的大小*/
dma_addr_t tx_dma; /*tx的dma地址*/
dma_addr_t rx_dma; /*rx的dma地址*/
unsigned cs_change:1; /*当前spi_transfer发送完成之后重新片选*/
u8 bits_per_word; /*每个字长的比特数,0代表使用spi_device中的默认值8*/
u16 delay_usecs; /*发送完成一个spi_transfer后的延时时间,此次传输结束和片选改变之间的延时,之后就会启动另一个传输或者结束整个消息*/
u32 speed_hz; /*通信时钟。如果是0,使用默认值*/
#ifdef CONFIG_SPI_LOMBO
struct lombo_spi_operate_para *esop;
#endif
struct list_head transfer_list; /*用于链接到spi_message,用来连接的双向链接节点*/
};
数据准备
static inline void spi_message_init(struct spi_message *m)
{
memset(m, 0, sizeof *m);
INIT_LIST_HEAD(&m->transfers);
}
初始化spi_message:清空message,初始化transfers链表头。
static inline void
spi_message_add_tail(struct spi_transfer *t, struct spi_message *m)
{
list_add_tail(&t->transfer_list, &m->transfers);
}
将spi_transfer加入到spi_message的链表尾部。
数据传输
系统提供了两种传输方式,分别是同步和异步,所谓同步方式是指数据传输的发起者必须等待本次传输的结束,期间不能做其它事情,用代码来解释就是,调用传输的函数后,直到数据传输完成,函数才会返回。而异步方式则正好相反,数据传输的发起者无需等待传输的结束,数据传输期间还可以做其它事情,用代码来解释就是,调用传输的函数后,函数会立刻返回而不用等待数据传输完成,我们只需设置一个回调函数,传输完成后,该回调函数会被调用以通知发起者数据传送已经完成。
设备驱动程序编写
使用ICM20608作为实验设备,代码参考自正点原子。首先需要在设备树下添加pinctrl节点描述ICM20608的引脚信息,
pinctrl_ecspi3: ecspi3grp{
fsl,pins = <
MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x10b0 //片选信号
MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x10b1 //CLK信号
MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x10b1 //MOSI信号
MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x10b1 //MISO信号
>;
};
然后在ecspi3中追加ICM20608子节点
&ecspi3{
fsl,spi-num-chipselects = <1>; /* 一个片选 */
cs-gpios = <&gpio1 20 GPIO_ACTIVE_LOW>; /* 片选引脚,软件片选 */
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi3>;//设置 IO 要使用的 pinctrl 子节点
status = "okay";
/* 对应的icm20608子节点 */
spidev0: icm20608@0 {/* @后面的0表示icm20608连接到 ECSPI3 的第 0 个通道上*/
reg = <0>;//表示icm20608连接到 ECSPI3 的第 0 个通道上
compatible = "alientek,icm20608";//兼容属性
spi-max-frequency = <8000000>;/* SPI时钟频率8MHZ */
};
};
随后便可编写SPI驱动
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_irq.h>
#include <linux/gpio.h>
#include <linux/of_gpio.h>
#include <linux/string.h>
#include <linux/irq.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/interrupt.h>
#include <linux/input.h>
#include <linux/spi/spi.h>
#include <linux/delay.h>
#include "icm20608reg.h"
#define ICM20608_CNT 1
#define ICM20608_NAME "icm20608"
/* 设备结构体 */
struct icm20608_dev
{
int major;
int minor;
dev_t devid;
struct cdev cdev;
struct class *class;
struct device *device;
void *private_data;
int cs_gpio;
struct device_node *nd;
signed int gyro_x_adc; /* 陀螺仪X轴原始值 */
signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */
signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */
signed int accel_x_adc; /* 加速度计X轴原始值 */
signed int accel_y_adc; /* 加速度计Y轴原始值 */
signed int accel_z_adc; /* 加速度计Z轴原始值 */
signed int temp_adc; /* 温度原始值 */
};
static struct icm20608_dev icm20608dev;
#if 0
/* SPI读寄存器 */
static int icm20608_read_regs(struct icm20608_dev *dev, u8 reg, void *buf, int len)
{
int ret = 0;
unsigned char txdata[len];
struct spi_message m;
struct spi_transfer *t;
struct spi_device *spi = (struct spi_device *)dev->private_data;
/* 片选拉低 */
gpio_set_value(dev->cs_gpio, 0);
/* 构建spi_transfer */
t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
/* 第一步:发送要读取的地址 */
txdata[0] = reg | 0x80;
t->tx_buf = txdata;
t->len = 1;
spi_message_init(&m);
spi_message_add_tail(t, &m);
ret = spi_sync(spi, &m);
/* 第二步:读取数据 */
txdata[0] = 0xff; /* 无效的 */
t->rx_buf = buf;
t->len = len;
spi_message_init(&m);
spi_message_add_tail(t, &m);
ret = spi_sync(spi, &m);
kfree(t);
gpio_set_value(dev->cs_gpio, 1); /* 拉高片选 */
return ret;
}
/* SPI写寄存器 */
static int icm20608_write_regs(struct icm20608_dev *dev, u8 reg, u8 *buf, int len)
{
int ret = 0;
unsigned char txdata[len];
struct spi_message m;
struct spi_transfer *t;
struct spi_device *spi = (struct spi_device *)dev->private_data;
/* 片选拉低 */
gpio_set_value(dev->cs_gpio, 0);
/* 构建spi_transfer */
t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
/* 第一步:发送要读取的地址 */
txdata[0] = reg & ~0x80;
t->tx_buf = txdata;
t->len = 1;
spi_message_init(&m);
spi_message_add_tail(t, &m);
ret = spi_sync(spi, &m);
/* 第二步:读取数据 */
t->tx_buf = buf;
t->len = len;
spi_message_init(&m);
spi_message_add_tail(t, &m);
ret = spi_sync(spi, &m);
kfree(t);
gpio_set_value(dev->cs_gpio, 1); /* 拉高片选 */
return ret;
}
#endif
/* SPI读寄存器 */
static int icm20608_read_regs(struct icm20608_dev *dev, u8 reg, void *buf, int len)
{
u8 data = 0;
struct spi_device *spi = (struct spi_device *)dev->private_data;
//gpio_set_value(dev->cs_gpio, 0); /* 片选拉低 */
data = reg | 0x80;
spi_write_then_read(spi, &data, 1, buf, len);
// spi_write(spi, &data, 1); /* 发送要读取的寄存器地址 */
// spi_read(spi, buf, len); /*读取数据*/
//gpio_set_value(dev->cs_gpio, 1); /* 拉高片选 */
return 0;
}
/* SPI写寄存器 */
static int icm20608_write_regs(struct icm20608_dev *dev, u8 reg, u8 *buf, int len)
{
u8 data = 0;
u8 *txdata;
struct spi_device *spi = (struct spi_device *)dev->private_data;
txdata = kzalloc(len + 1, GFP_KERNEL);
//gpio_set_value(dev->cs_gpio, 0); /* 片选拉低 */
txdata[0] = reg & ~0x80; /* 要写的寄存器地址 */
memcpy(&txdata[1], buf, len); /* 要发送的数据拷贝到txdata里面 */
spi_write(spi, txdata, len + 1); /* 发送要写的寄存器地址 */
// spi_write(spi, &data, 1); /* 发送要写的寄存器地址 */
// spi_write(spi, buf, len); /* 发送要写的寄存器地址 */
kfree(txdata);
//gpio_set_value(dev->cs_gpio, 1); /* 拉高片选 */
return 0;
}
/*ICM20608读取单个寄存器 */
static unsigned char icm20608_read_onereg(struct icm20608_dev *dev, u8 reg)
{
u8 data = 0;
icm20608_read_regs(dev, reg, &data, 1);
return data;
}
/*ICM20608写一个寄存器 */
static void icm20608_write_onereg(struct icm20608_dev *dev, u8 reg, u8 value)
{
u8 buf = value;
icm20608_write_regs(dev, reg, &buf, 1);
}
/*
* @description : 读取ICM20608的数据,读取原始数据,包括三轴陀螺仪、
* : 三轴加速度计和内部温度。
* @param - dev : ICM20608设备
* @return : 无。
*/
void icm20608_readdata(struct icm20608_dev *dev)
{
unsigned char data[14];
icm20608_read_regs(dev, ICM20_ACCEL_XOUT_H, data, 14);
dev->accel_x_adc = (signed short)((data[0] << 8) | data[1]);
dev->accel_y_adc = (signed short)((data[2] << 8) | data[3]);
dev->accel_z_adc = (signed short)((data[4] << 8) | data[5]);
dev->temp_adc = (signed short)((data[6] << 8) | data[7]);
dev->gyro_x_adc = (signed short)((data[8] << 8) | data[9]);
dev->gyro_y_adc = (signed short)((data[10] << 8) | data[11]);
dev->gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
}
/* ICM20608初始化 */
void icm20608_reginit(struct icm20608_dev *dev)
{
u8 value = 0;
icm20608_write_onereg(dev, ICM20_PWR_MGMT_1, 0x80); /* 复位,复位后为0x40,睡眠模式 */
mdelay(50);
icm20608_write_onereg(dev, ICM20_PWR_MGMT_1, 0x01); /* 关闭睡眠,自动选择时钟 */
mdelay(50);
value = icm20608_read_onereg(dev, ICM20_WHO_AM_I);
printk("ICM20608 ID=%#X\r\n", value);
value = icm20608_read_onereg(dev, ICM20_PWR_MGMT_1);
printk("ICM20_PWR_MGMT_1=%#X\r\n", value);
icm20608_write_onereg(&icm20608dev, ICM20_SMPLRT_DIV, 0x00); /* 输出速率是内部采样率 */
icm20608_write_onereg(&icm20608dev, ICM20_GYRO_CONFIG, 0x18); /* 陀螺仪±2000dps量程 */
icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG, 0x18); /* 加速度计±16G量程 */
icm20608_write_onereg(&icm20608dev, ICM20_CONFIG, 0x04); /* 陀螺仪低通滤波BW=20Hz */
icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG2, 0x04); /* 加速度计低通滤波BW=21.2Hz */
icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_2, 0x00); /* 打开加速度计和陀螺仪所有轴 */
icm20608_write_onereg(&icm20608dev, ICM20_LP_MODE_CFG, 0x00); /* 关闭低功耗 */
icm20608_write_onereg(&icm20608dev, ICM20_FIFO_EN, 0x00); /* 关闭FIFO */
}
static int icm20608_open(struct inode *inode, struct file *filp)
{
filp->private_data = &icm20608dev; /* 设置私有数据 */
return 0;
}
ssize_t icm20608_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
signed int data[7];
long err = 0;
struct icm20608_dev *dev = (struct icm20608_dev *)filp->private_data;
icm20608_readdata(dev);
data[0] = dev->gyro_x_adc;
data[1] = dev->gyro_y_adc;
data[2] = dev->gyro_z_adc;
data[3] = dev->accel_x_adc;
data[4] = dev->accel_y_adc;
data[5] = dev->accel_z_adc;
data[6] = dev->temp_adc;
err = copy_to_user(buf, data, sizeof(data));
return 0;
}
static int icm20608_release(struct inode *inode, struct file *filp)
{
return 0;
}
static const struct file_operations icm20608_fops = {
.owner = THIS_MODULE,
.open = icm20608_open,
.read = icm20608_read,
.release = icm20608_release,
};
/*
* @description : spi 驱动的 probe 函数,当驱动与设备匹配以后此函数就会执行
* @param - spi : spi 设备
*/
static int icm20608_probe(struct spi_device *spi)
{
int ret = 0;
printk("icm20608_probe\r\n");
/* 搭建字符设备驱动框架,在/dev/下 */
/* 2,注册字符设备 */
icm20608dev.major = 0; /* 由系统分配主设备号 */
if (icm20608dev.major)
{ /* 给定主设备号 */
icm20608dev.devid = MKDEV(icm20608dev.major, 0);
ret = register_chrdev_region(icm20608dev.devid, ICM20608_CNT, ICM20608_NAME);
}
else
{ /* 没有给定主设备号 */
ret = alloc_chrdev_region(&icm20608dev.devid, 0, ICM20608_CNT, ICM20608_NAME);
icm20608dev.major = MAJOR(icm20608dev.devid);
icm20608dev.minor = MINOR(icm20608dev.devid);
}
if (ret < 0)
{
printk("icm20608 chrdev_region err!\r\n");
goto fail_devid;
}
printk("icm20608 major=%d, minor=%d\r\n", icm20608dev.major, icm20608dev.minor);
/* 3,注册字符设备 */
icm20608dev.cdev.owner = THIS_MODULE;
cdev_init(&icm20608dev.cdev, &icm20608_fops);
ret = cdev_add(&icm20608dev.cdev, icm20608dev.devid, ICM20608_CNT);
if (ret < 0)
{
goto fail_cdev;
}
/* 4,自动创建设备节点 */
icm20608dev.class = class_create(THIS_MODULE, ICM20608_NAME);
if (IS_ERR(icm20608dev.class))
{
ret = PTR_ERR(icm20608dev.class);
goto fail_class;
}
icm20608dev.device = device_create(icm20608dev.class, NULL,
icm20608dev.devid, NULL, ICM20608_NAME);
if (IS_ERR(icm20608dev.device))
{
ret = PTR_ERR(icm20608dev.device);
goto fail_device;
}
#if 0
/* 获取片选引脚 */
icm20608dev.nd = of_get_parent(spi->dev.of_node);
icm20608dev.cs_gpio = of_get_named_gpio(icm20608dev.nd, "cs-gpio", 0);
if (icm20608dev.cs_gpio < 0)
{
printk("can't get cs-gpio\r\n");
goto fail_gpio;
}
ret = gpio_request(icm20608dev.cs_gpio, "cs");
if (ret < 0)
{
printk("cs_gpio request failed!\r\n");
}
ret = gpio_direction_output(icm20608dev.cs_gpio, 1); /* 默认高电平 */
#endif
/* 初始化spi_device */
spi->mode = SPI_MODE_0;
spi_setup(spi);
/* 设置icm20608dev的私有数据为spi */
icm20608dev.private_data = spi;
/* 初始化icm20608 寄存器 */
icm20608_reginit(&icm20608dev);
return 0;
fail_gpio:
fail_device:
class_destroy(icm20608dev.class);
fail_class:
cdev_del(&icm20608dev.cdev);
fail_cdev:
unregister_chrdev_region(icm20608dev.devid, ICM20608_CNT);
fail_devid:
return ret;
}
/*
* @description : i2c 驱动的 remove 函数,移除 i2c 驱动的时候此函数会执行
* @param - spi : spi 设备
*/
static int icm20608_remove(struct spi_device *spi)
{
/* 1,删除字符设备 */
cdev_del(&icm20608dev.cdev);
/* 2,注销设备号 */
unregister_chrdev_region(icm20608dev.devid, ICM20608_CNT);
/* 3,摧毁设备 */
device_destroy(icm20608dev.class, icm20608dev.devid);
/* 4,摧毁类 */
class_destroy(icm20608dev.class);
/*5.释放片选IO */
gpio_free(icm20608dev.cs_gpio);
return 0;
}
/* 传统匹配方式 ID 列表 */
struct spi_device_id icm20608_id[] = {
{"alientek,icm20608", 0},
{}};
/* 设备树匹配列表 */
static const struct of_device_id icm20608_of_match[] = {
{
.compatible = "alientek,icm20608",
},
{}};
/* SPI 驱动结构体 */
struct spi_driver icm20608_driver = {
.probe = icm20608_probe,
.remove = icm20608_remove,
.driver = {
.name = "icm20608",
.owner = THIS_MODULE,
.of_match_table = icm20608_of_match,
},
.id_table = icm20608_id,
};
/*驱动入口函数*/
static int __init icm20608_init(void)
{
int ret = 0;
ret = spi_register_driver(&icm20608_driver);
return ret;
}
/*驱动出口函数*/
static void __exit icm20608_exit(void)
{
spi_unregister_driver(&icm20608_driver);
}
module_init(icm20608_init);
module_exit(icm20608_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("supersmart");

















 509
509

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









