




 本文介绍如何使用SolidWorks软件及插件sw2urdfSetup导出URDF(通用机器人描述格式)模型,包括添加轴、设置链接和关节类型等步骤,最终在v-rep中成功导入。
本文介绍如何使用SolidWorks软件及插件sw2urdfSetup导出URDF(通用机器人描述格式)模型,包括添加轴、设置链接和关节类型等步骤,最终在v-rep中成功导入。
v-rep内提供简单的建模,但是复杂的则需要导入,简单的导入obj等格式这里就略过,这里说一下导入URDF模型,摘录:URDF(Universal Robot Description Format)——通用机器人描述格式,它是ROS等里边使用的一种机器人的描述文件,包含的内容有:连杆、关节,运动学和动力学参数、可视化模型、碰撞检测模型等。
我这里使用SolidWorks软件建模,SolidWorks建模后导出URDF需要下载插件:sw2urdfSetup.exe,网址:http://wiki.ros.org/sw_urdf_exporter;或者:https://github.com/ros/solidworks_urdf_exporter/releases;
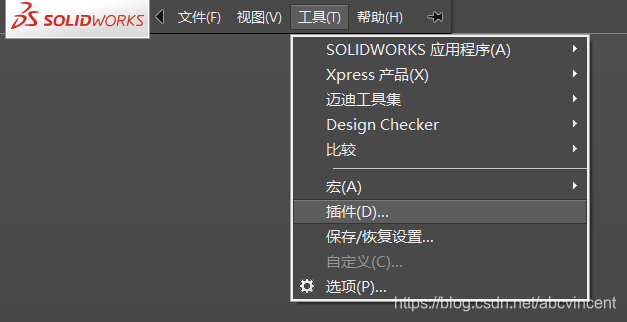
下载后直接安装,前提电脑已经安装SolidWorks,全部默认即可,安装后打开SolidWorks查看,工具-插件,如下:
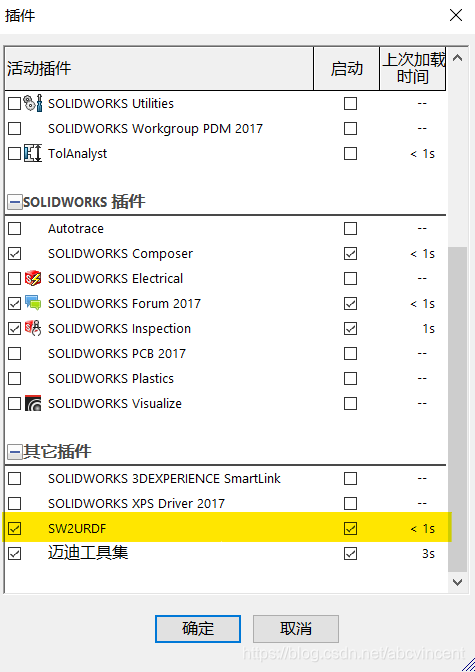
然后看到如下黄色位置,把对勾勾上:
然后就可以在SolidWorks里建模了,然后通过这个插件导出,比如我建模了一个固定四轮小车:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7154
7154

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









