



首先我们要理解:
透视投影变换,它实际上所做的事情是将摄像机点,近平面,远平面这三者组成的台体区域中的任意一点,映射成为一个长方体区域中的任意一点。如下图所示
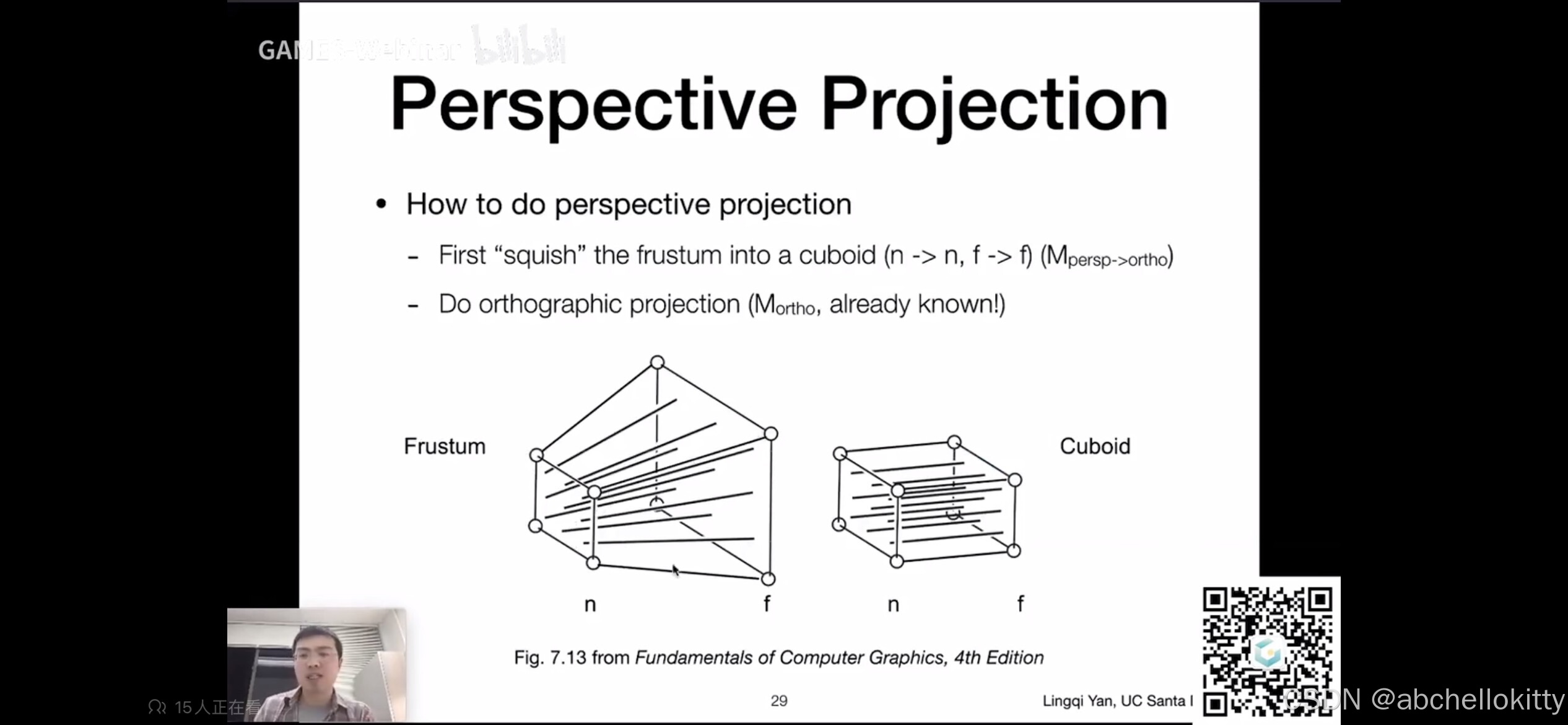
映射成为长方体以后,我们就可以仿照平行投影的做法,进一步将其转化为ndc坐标。
假设映射前和映射后的点分别为
(xe,ye,ze),(xp,yp,zp)
在这里,xp和yp直接反映了原来的那个点在投影面上的位置。所以必须严格遵守相似三角形的比例关系,即xp=-n·xe/ze,yp=-n·ye/ze。
而zp的主要目的是为了表示投影面上同一位置的两个像素点的深度关系。因此它只需要满足ze和zp是正相关的即可。并且边界情况需要对应上,即当ze=-n时,zp=-n;ze=-f时,zp=-f。
一种最容易想到的做法是让zp=ze,这样做达到了正相关的目的,并且满足边界情况。但是不能落地实现。具体的原因后面会讲。
但是直接求(xe,ye,ze,1)到(-n·xe/ze,-n·ye/ze,zp,1)的关系是困难的,因为矩阵只能表示线性关系,不能做除法,需要消掉ze对x和y结果的影响。
我们需要明白,在三维空间上,点的齐次坐标(x,y,z,1)与(x·w,y·w,z·w,w)是等价的。
为了消除x和y对于ze的依赖,可以让w=-ze。
于是我们引入了剪裁坐标(n•xe,n•ye,-zp·ze,-ze)。
我们设这样的剪裁坐标为(xc,yc,zc,wc)
那么我们现在要求取的关系就变成了到(xe,ye,ze,1)到 (xc,yc,zc,wc)的关系。
这里就可以解释为什么zp不等于ze,因为如果zp等于ze,那么zc=-ze^2,这样的关系是不能通过矩阵表示的。
但是如果zc和ze的是线性相关的,并且当ze=-n时,zp=-n;ze=-f时,zp=-f。这样的矩阵是实际存在并且能被求出来的,并且此时zp和ze仍然是正相关的,且符合边界条件。这样的变换矩阵就达到了 我们一开始所说的目的:
1.xp和yp严格遵守相似三角形比例。以确保透视投影的正确性。
2.zp和ze正相关,并且符合边界条件。以确保像素之间的深度关系。
我们已经知道:zp和ze并不是呈线性关系,接下来,我们尝试认识一下zp和ze应该是什么样的变化关系。
首先我们求取原坐标到剪裁坐标的变换矩阵M:
显然M是一个4乘4的矩阵,并且满足

由于xc=nxe,yc=nye,wc=-ze
所以我们可以先求出第1行的元素为(n,0,0,0),第2行的元素为(0,n,0,0),第4行的元素为(0,0,-1,0)
而第3行的前两个元素应该为0,因为zc和xe、ye无关。
于是我们初步得到下面的矩阵
于是A·ze+B=-zp·ze
又因为当ze=-n时,zp=-n,zc=-zp·ze=-n^2
当ze=-f时,zp=-f,zc=-zp·ze=-n^2
代入得
解得A=n+f,B=n·f
所以变换矩阵为
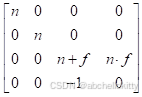
所以zc=-ze·zp=(n+f)·ze+n·f
可以得出zp和ze的关系为

于是

我们尝试探究F(ze)关于ze的单调性,可以对ze进行求导
我们按不同区间对其进行分析:
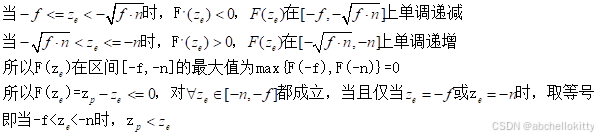
综上所示,我们得出最终结论:
在远平面和近平面中间的任意一点,其所投影的z值相比原来的z值更加趋近于远平面,远离近平面。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









