




Ubuntu 20.04 + ROS1(noetic) + euroc dataset
教程不包含ROS1自身的环境构建,重点在于源码构建rtabmap + euroc
相关教程均来自官方网站以及wiki
文章目录
1、Creating a workspace for catkin
创建一个工作空间 【注:本教程假设您已经安装了catkin等内容】
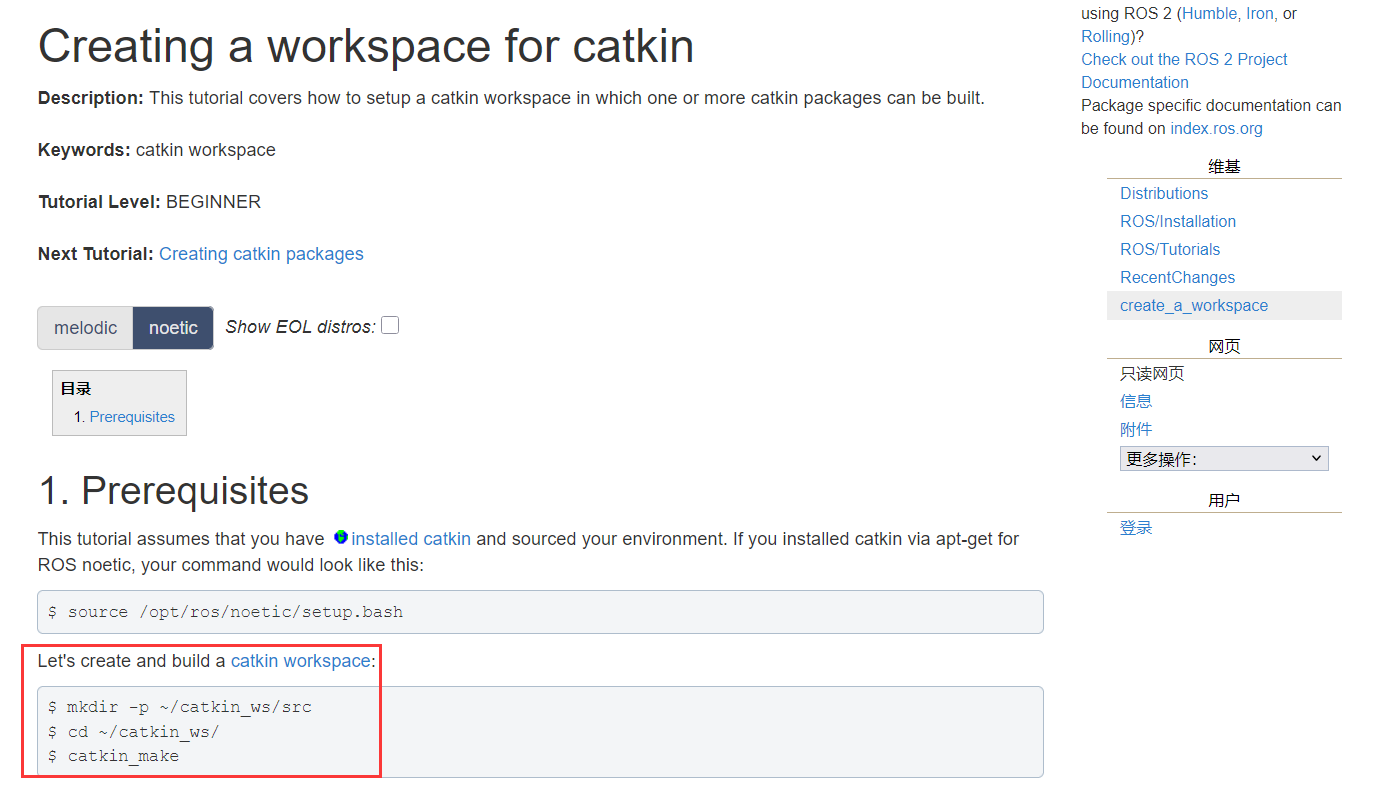
2、Create and build a catkin workspace
创建并构建catkin工作环境
mkdir -p ~/catkin_ros_map_ws/src
cd ~/catkin_ros_map_ws/
catkin_make
source devel/setup.bash
catkin_ros_map_ws 可替换成别其他文件名
选项
-p表示如果上级目录不存在,则一并创建;若目录已存在则不会报错catkin_make :编译当前工作空间内的所有 ROS 软件包
ource devel/setup.bash 加载工作空间的环境配置
3、Required dependencies
所需的依赖项
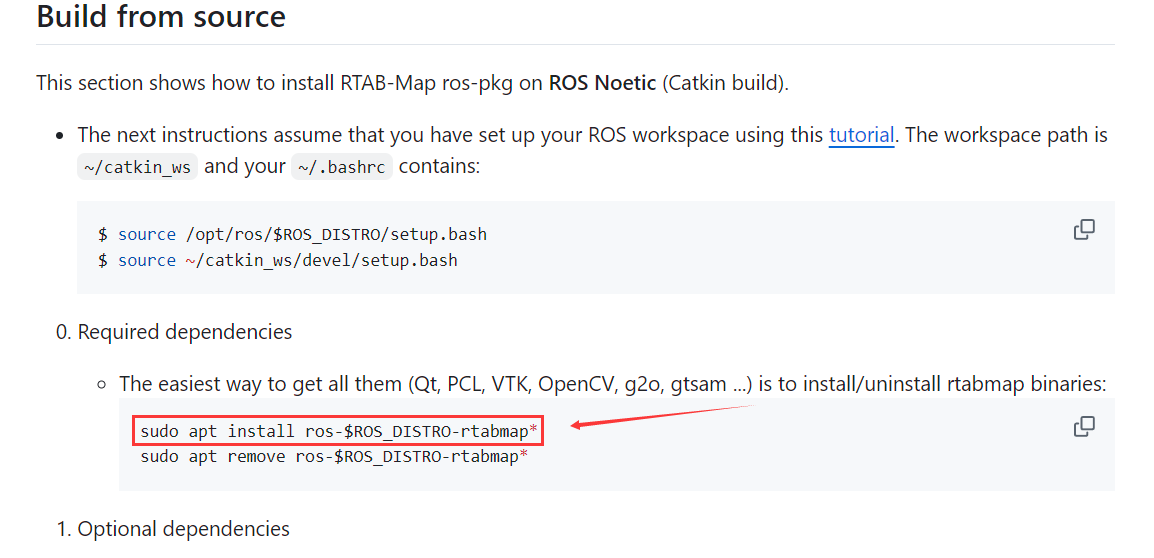
sudo apt install ros-$ROS_DISTRO-rtabmap*
4、Install RTAB-Map standalone libraries.
Do not clone in your Catkin workspace. 安装RTAB-Map独立库,注意不要在你的Catkin工作空间进行git clone,也就是说不要clone到你的mkdir -p ~/catkin_ros_map_ws/src中
cd ~
git clone https://github.com/introlab/rtabmap.git rtabmap
cd rtabmap/build
cmake ..
make -j6
sudo make install
5、Install RTAB-Map ros-pkg in your src folder of your Catkin workspace.
在Catkin工作区的src文件夹中安装RTAB-Map ros-pkg
cd ~/catkin_ros_map_ws
git clone https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros
catkin_make -j4
cd ~/catkin_ros_map_ws/
source devel/setup.bash
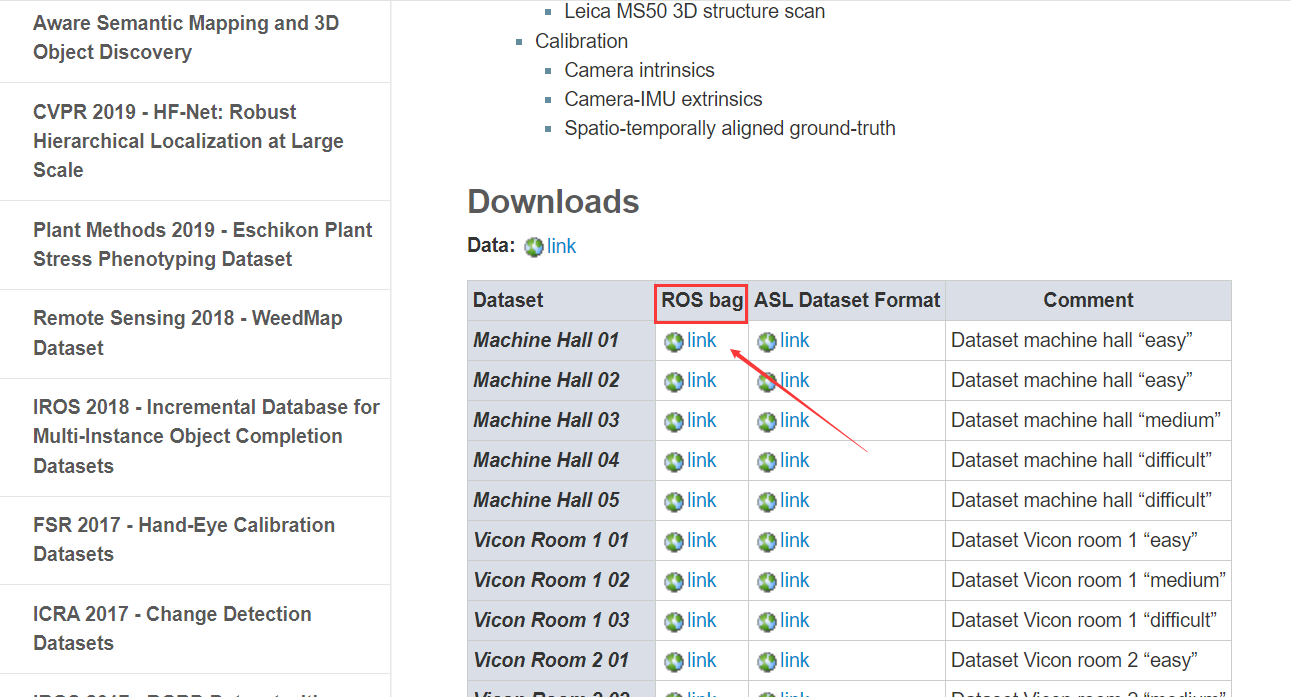
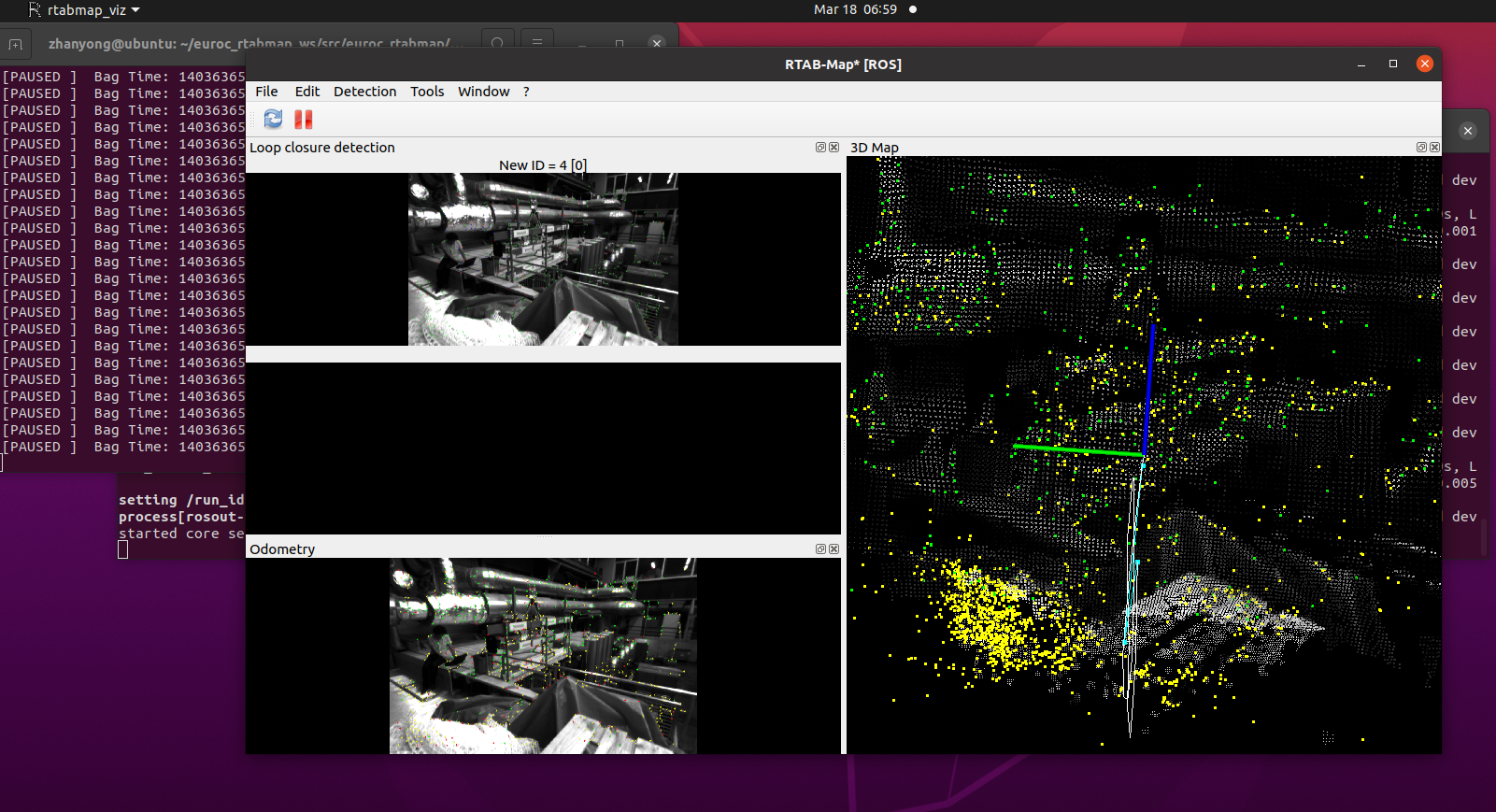
6、Download EuRoC Dataset
roscore
# 新终端
roslaunch rtabmap_examples euroc_datasets.launch
# 新终端
cd ~/euroc_rtabmap_ws/src/euroc_rtabmap/bags
rosbag play --clock MH_01_easy.bag
cd ~/euroc_rtabmap_ws/src/euroc_rtabmap/bags 这部分的内容是定位到下载的bag文件


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









