



 本文探讨了在特定条件下,西瓜被切后正视图中红色瓜瓤占比的计算问题。通过建立极坐标系,分析不同角度切割下,红色区域在正视图中的面积比例,涉及特殊角度和复杂角度范围的计算。
本文探讨了在特定条件下,西瓜被切后正视图中红色瓜瓤占比的计算问题。通过建立极坐标系,分析不同角度切割下,红色区域在正视图中的面积比例,涉及特殊角度和复杂角度范围的计算。
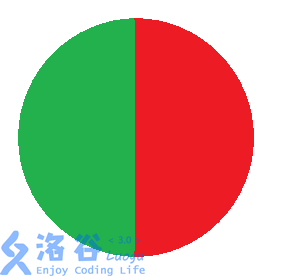
妖梦费了好大的劲为幽幽子准备了一个大西瓜,甚至和兔子铃仙打了一架。现在妖梦闲来无事,就蹲在一旁看幽幽子吃西瓜。西瓜可以看作一个标准的球体,瓜皮是绿色的,瓜瓤是红色的,瓜皮的厚度可视为0。妖梦恰好以正视的角度看着这个西瓜。幽幽子是一个吃货,妖梦一走神,自己背后的刀就不见了,而西瓜也被切掉了一块。幽幽子切西瓜时刀面始终垂直于桌面,并且切下的一块在俯视图中正好是一个以西瓜中心为顶点,半径为西瓜半径的扇形。如图所示,是一种满足条件的情况
俯视:

正视:
妖梦看着红红绿绿的西瓜,忽然陷入思考,红色的西瓜瓤占整个西瓜可视面积的百分之多少呢?但她对几何一窍不通,于是想问问幽幽子,但幽幽子正抱着切下来的西瓜大吃特吃,没有理会妖梦。于是她想让你来帮她解决这个问题。
为了方便描述问题,我们为俯视图建立一个平面极坐标系,极点在俯视图圆形(扇形)的正中央,极轴方向竖直向下。极轴所对应的角度为0度,角度逆时针依次增加,直到转一圈又回到极轴。因此角度范围是[0,360)。幽幽子会切掉西瓜从a°到b°的这一整块。
输入输出格式
输入格式:
第一行一个整数T,表示数据组数。
接下来T行每行两个整数a,b。表示切掉范围的起始角度和终止角度。若a>b,则切掉的角度为[a,360)∪[0,b]这一范围。
输出格式:
T行,每行一个实数后跟一个百分号“%”,表示被切掉一部分的西瓜的正视图(平行投影)中,红色的西瓜瓤占西瓜总可视面积的百分比。在此题中,妖梦的视野方向平行于俯视图的极轴,并且极轴射线指向妖梦。
输出的实数四舍五入保留一位小数,你的答案被判作正确,当且仅当与标准答案完全相同。
输入输出样例
2
90 270
315 45
0.0%
70.7%
说明
样例说明:
第一个样例中,切掉的西瓜恰好在背面,在妖梦的角度看起来与未切过的西瓜并无区别,因此输出0%。第二个样例中,切掉了从315°~45°这一部分,经过计算,得到答案为sqrt(2)/2,化成小数得到0.707,即70.7%
本题目共有10个测试点。
对于第1个测试点,a,b∈{0,90,180,270}。
对于第2个测试点,270<=a<=359,0<=b<=90。
对于第3,4个测试点,180<=a<=359,0<=b<=179。
对于全部测试点,0<=a,b<=359,a≠b。
1<=T<=10000
PS:本题实在太玄。。。
首先,要看懂题目的意思,题目就是说给你一个西瓜,给出俯视图,并在俯视图上向瓜心方向切2刀,每一刀的距离都是瓜的半径。要你求出,在正视图中,红色的面积是正视图
面积的多少。
出题者很友善地给出了部分特殊情况,那我们一起来分析下:
10%:
由于a,b∈{0,90,180,270},我们可以全用来特判;
20%(10%+10%):
由于270<=a<=359,0<=b<=90,说明正视图的总面积是π*r*r。那么,我们只需求出红色的总面积,具体见下;

40%(10%+10%+20%):
这种情况就开始比较复杂了,可以自己推一下;
100%:
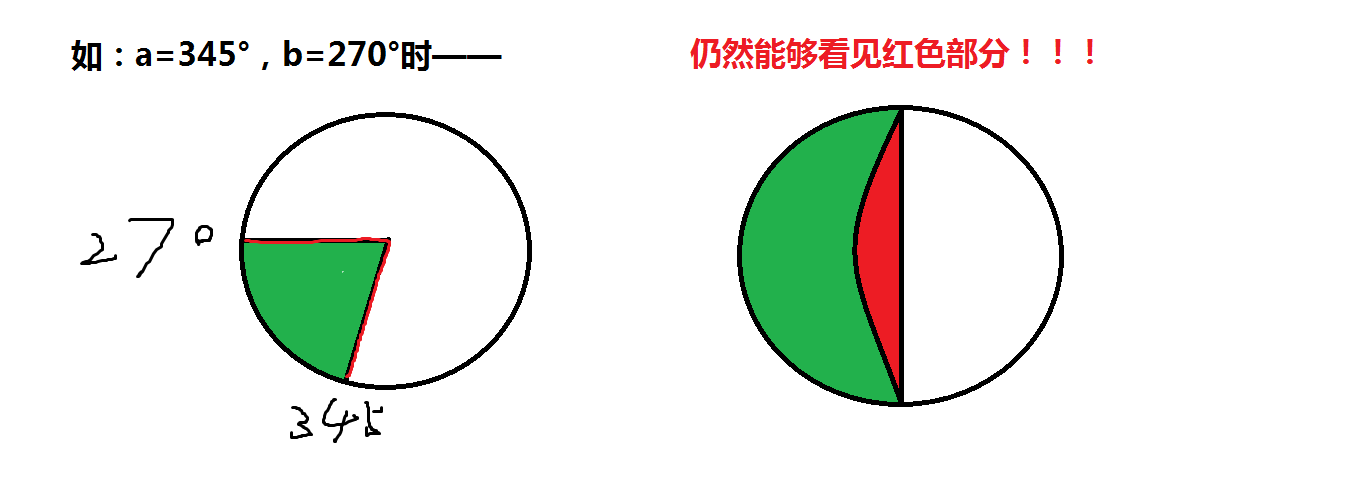
本蒟蒻仍然将每种情况都推了一遍。。。唯一要注意的是,一定要把目光放在留下来的西瓜上面,见下。
另外的:注意cmath里的sin什么的都是弧度,我们要把角度转成弧度再用,弧度=π*角度/180°。
代码如下:


1 #include<cmath>
2 #include<cstdio>
3 #include<cstring>
4 #include<algorithm>
5 using namespace std;
6 const double pi=3.14159265358980;
7 inline int read(){
8 int x=0; char ch=getchar();
9 while (ch<'0'||ch>'9') ch=getchar();
10 while (ch>='0'&ch<='9') x=x*10+ch-'0',ch=getchar();
11 return x;
12 }
13 double chg(int x){
14 return pi*x/180;
15 }
16 void situ1(int d1,int d2){
17 if (d1==0||d2==0){
18 if (d1==0){if (d2==90) puts("50.0%"); else puts("0.0%");}
19 else{if (d1==270) puts("50.0%"); else puts("0.0%");}
20 }else
21 if (d1==90||d2==90){
22 if (d1==90) puts("0.0%"); else puts("100.0%");
23 }else
24 if (d1==180||d2==180){
25 if (d1==180) puts("0.0%"); else puts("100.0%");
26 }
27 }
28 void situ2(int d1,int d2){
29 double del=chg(360-d1),ret=sin(del);
30 del=chg(d2),ret+=sin(del),ret*=100/2;
31 printf("%.1f%c\n",ret,'%');
32 }
33 void situ3(int d1,int d2){
34 if (d1<=270&&d2>=90) puts("100.0%");
35 else{
36 double del=chg(90-abs(270-d1)),ret=0,tot=0; if (d1!=180) ret=sin(del);
37 if (d1>=270) tot=1; else tot=ret;
38 del=chg(90-abs(90-d2)),ret+=sin(del);
39 if (d2<=90) tot+=1; else tot+=sin(del);
40 ret=ret/tot*100;
41 printf("%.1f%c\n",ret,'%');
42 }
43 }
44 void situelse(int d1,int d2){
45 double del=0,ret=0,tot=0;
46 if (d1<d2){
47 if (0<=d1&&d1<90){
48 if (90-d1<=d2-90) puts("0.0%");
49 else{
50 if (d2<=90) del=chg(d2),ret=sin(del),tot++;
51 if (d2>90) del=chg(180-d2),tot=ret=sin(del);
52 del=chg(d1),ret-=sin(del),tot++;
53 ret=ret/tot*100;
54 printf("%.1f%c\n",ret,'%');
55 }
56 }else
57 if (90<=d1&&d1<180) puts("0.0%"); else
58 if (180<=d1&&d1<270){
59 if (270-d1>=d2-270) puts("0.0%");
60 else{
61 del=chg(d1-180),tot=ret=sin(del),tot++;
62 del=chg(360-d2),ret-=sin(del);
63 ret=ret/tot*100;
64 printf("%.1f%c\n",ret,'%');
65 }
66 }else
67 if (270<=d1&&d1<360){
68 del=chg(360-d1),ret=sin(del),tot=2;
69 del=chg(360-d2),ret-=sin(del);
70 ret=ret/tot*100;
71 printf("%.1f%c\n",ret,'%');
72 }
73 }else{
74 if (0<d1&&d1<=90){
75 del=chg(d1),tot=sin(del);
76 del=chg(d2),ret=sin(del);
77 ret=ret/tot*100;
78 printf("%.1f%c\n",ret,'%');
79 }else
80 if (90<d1&&d1<=180){
81 if (d2>=90) puts("100.0%"); else{
82 tot=1;
83 del=chg(d2),ret=sin(del);
84 ret=ret/tot*100;
85 printf("%.1f%c\n",ret,'%');
86 }
87 }else
88 if (180<d1&&d1<=270){
89 del=chg(d1-180),ret=sin(del),tot++;
90 if (90<=d2) ret=tot=1;
91 if (0<d2&&d2<90) del=chg(d2),ret+=sin(del),tot++;
92 ret=ret/tot*100;
93 printf("%.1f%c\n",ret,'%');
94 }else
95 if (270<d1&&d1<360){
96 del=chg(360-d1),ret=sin(del),tot++;
97 if (270<d2) del=chg(360-d2),tot=sin(del);
98 if (90<=d2&&d2<180) del=chg(180-d2),ret+=sin(del),tot+=sin(del);
99 if (0<d2&&d2<90) del=chg(d2),ret+=sin(del),tot++;
100 ret=ret/tot*100;
101 printf("%.1f%c\n",ret,'%');
102 }
103 }
104 }
105 inline void _solve(){
106 int dg_s=read(),dg_t=read();
107 if (dg_s%90==0&&dg_t%90==0) situ1(dg_s,dg_t); else
108 if (270<=dg_s&&dg_s<360&&0<=dg_t&&dg_t<=90) situ2(dg_s,dg_t); else
109 if (180<=dg_s&&dg_s<360&&0<=dg_t&&dg_t<180) situ3(dg_s,dg_t); else
110 situelse(dg_s,dg_t);
111 }
112 int main(){
113 for (int T=read(); T; T--) _solve();
114 return 0;
115 }

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









