






 本文探讨了旋转矩阵的性质,包括如何验证其为正交矩阵,详细介绍了罗德里格斯公式的推导和理解,并展示了四元数在旋转表示中的应用。此外,还总结了旋转矩阵、轴角、欧拉角和四元数之间的转换关系。同时,提供了从大型Eigen矩阵中提取3x3子矩阵的代码示例,并实现了多种求解线性方程组Ax=b的方法,如求逆、QR分解、最小二乘法和Jacobi迭代法。
本文探讨了旋转矩阵的性质,包括如何验证其为正交矩阵,详细介绍了罗德里格斯公式的推导和理解,并展示了四元数在旋转表示中的应用。此外,还总结了旋转矩阵、轴角、欧拉角和四元数之间的转换关系。同时,提供了从大型Eigen矩阵中提取3x3子矩阵的代码示例,并实现了多种求解线性方程组Ax=b的方法,如求逆、QR分解、最小二乘法和Jacobi迭代法。
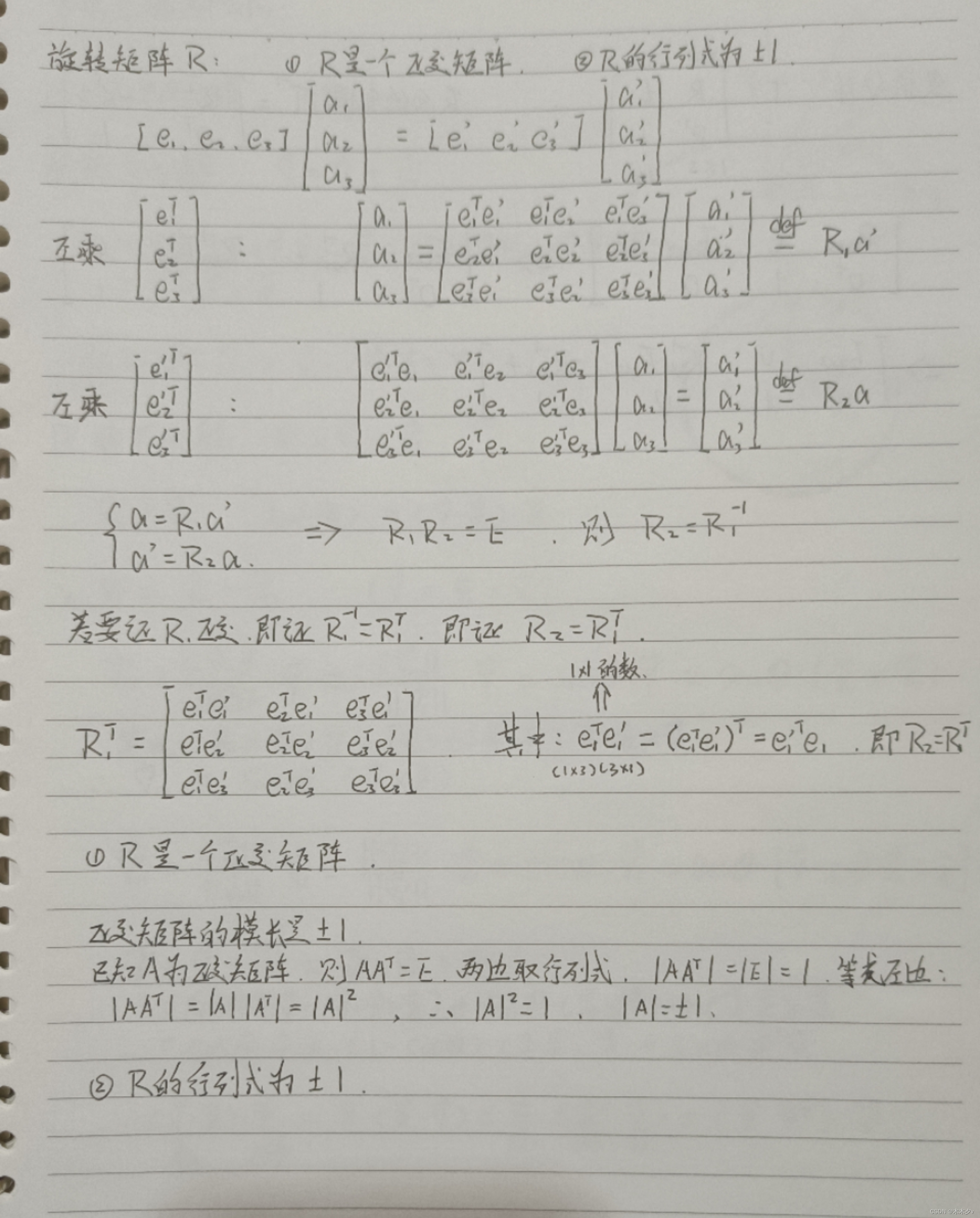
1. 验证旋转矩阵是正交矩阵。
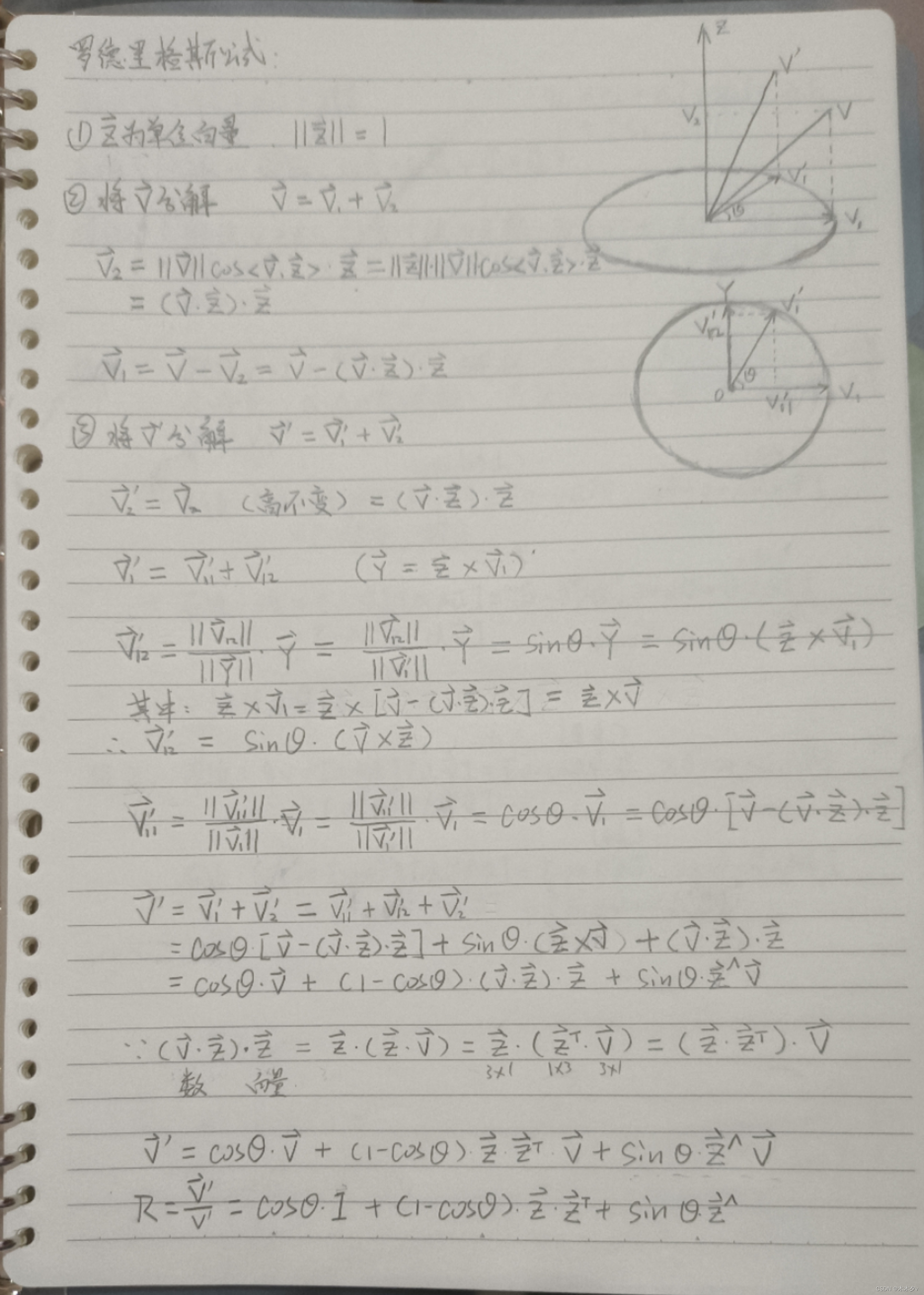
2. * 寻找罗德里格斯公式的推导过程并加以理解。
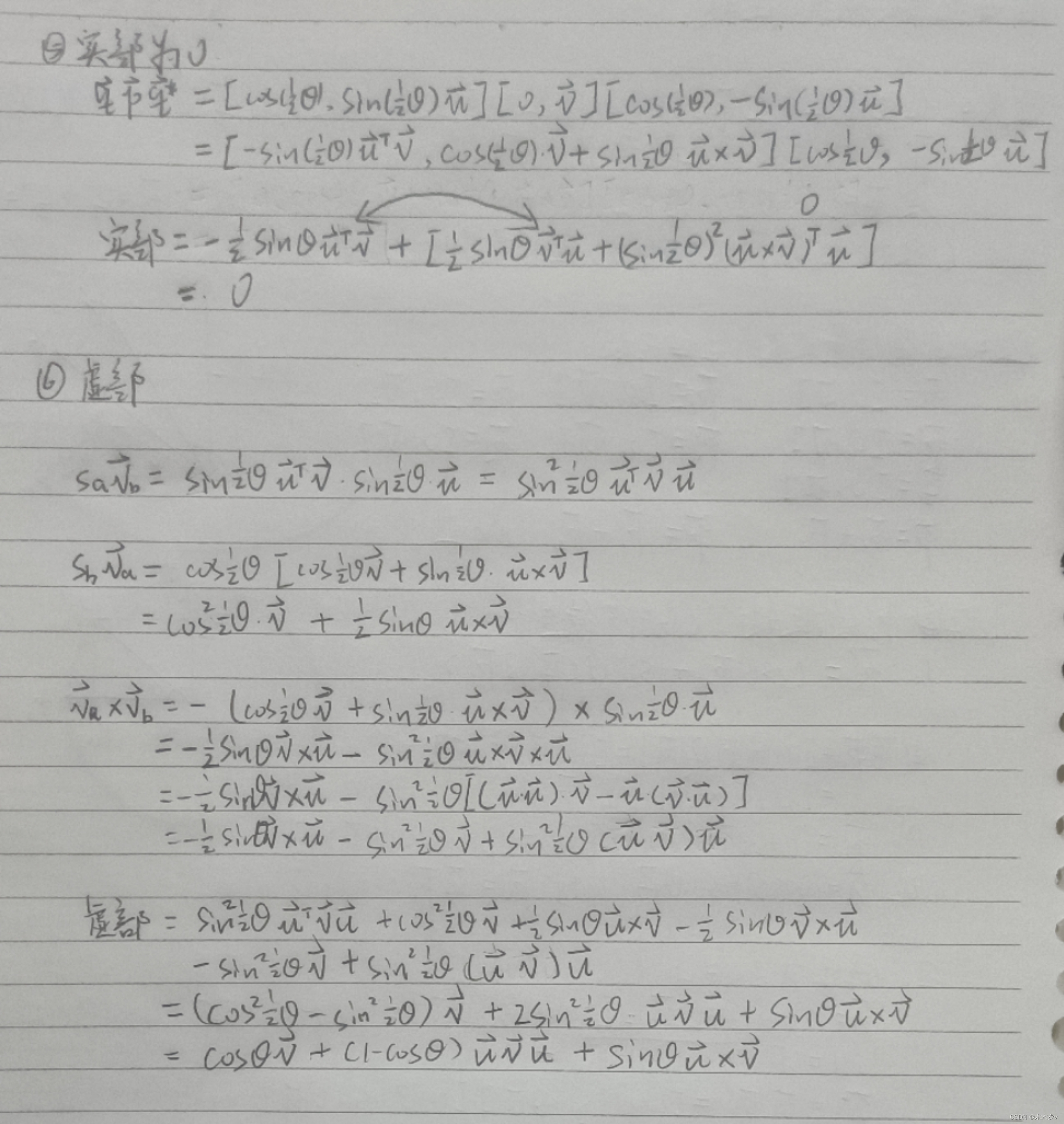
3. 验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应到一个三维空间点,见式(3.33)。
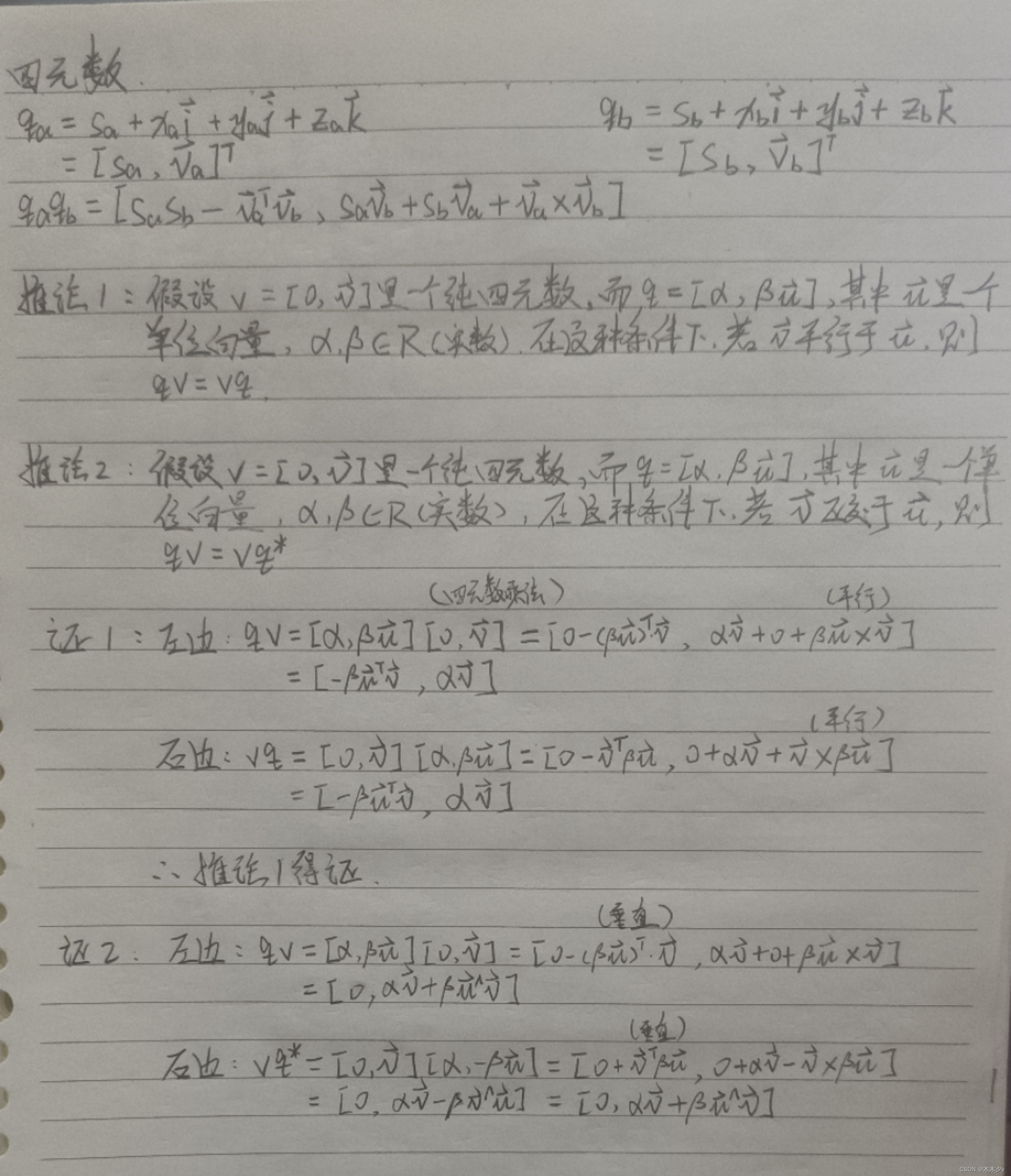
证明需要用到四元数的乘法以及乘法的两个推论,四元数乘法以及推论证明如下:
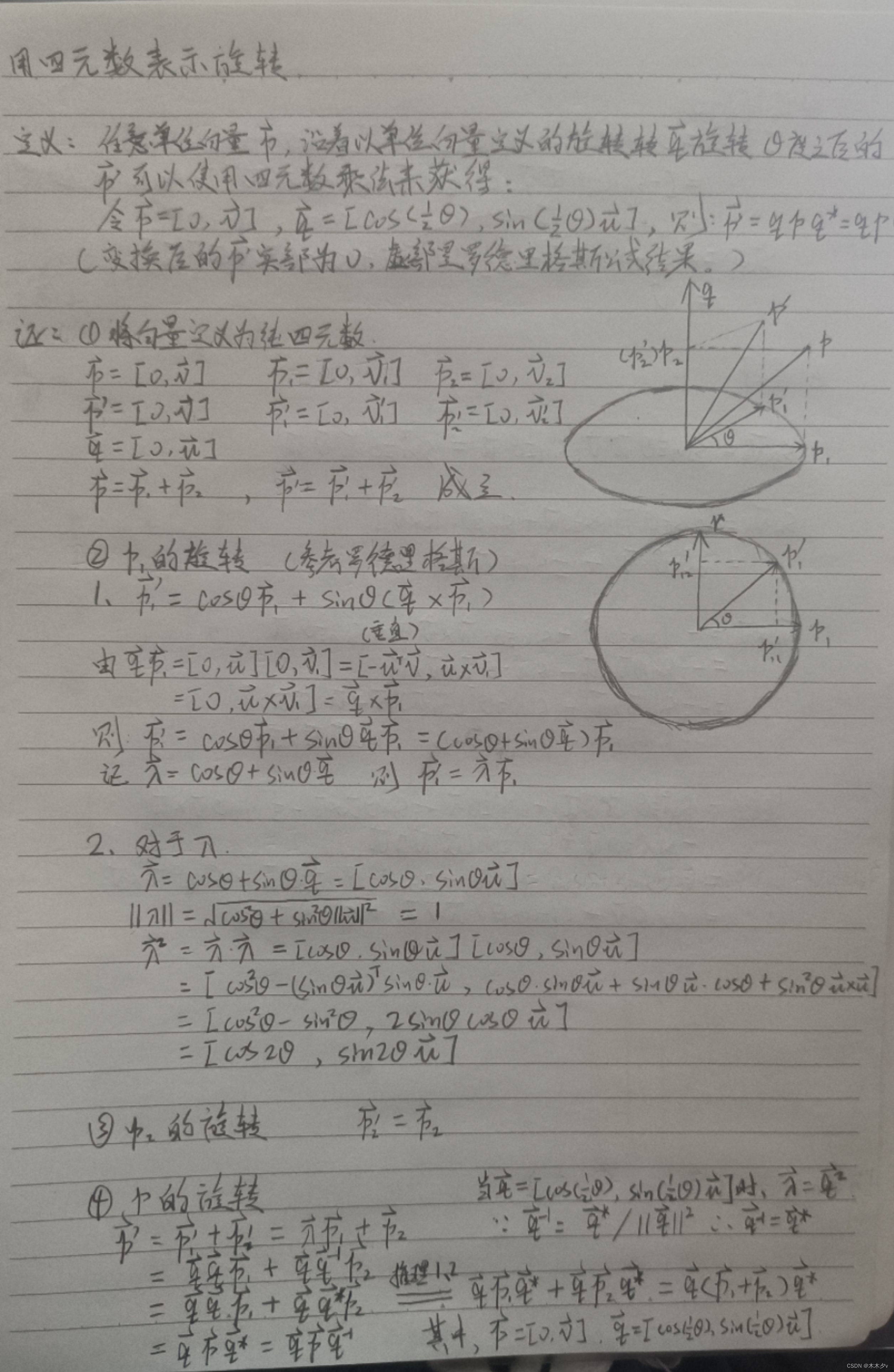
接下来证明旋转变换后结果是虚四元数,实部为0,虚部为罗德里格斯公式结果:
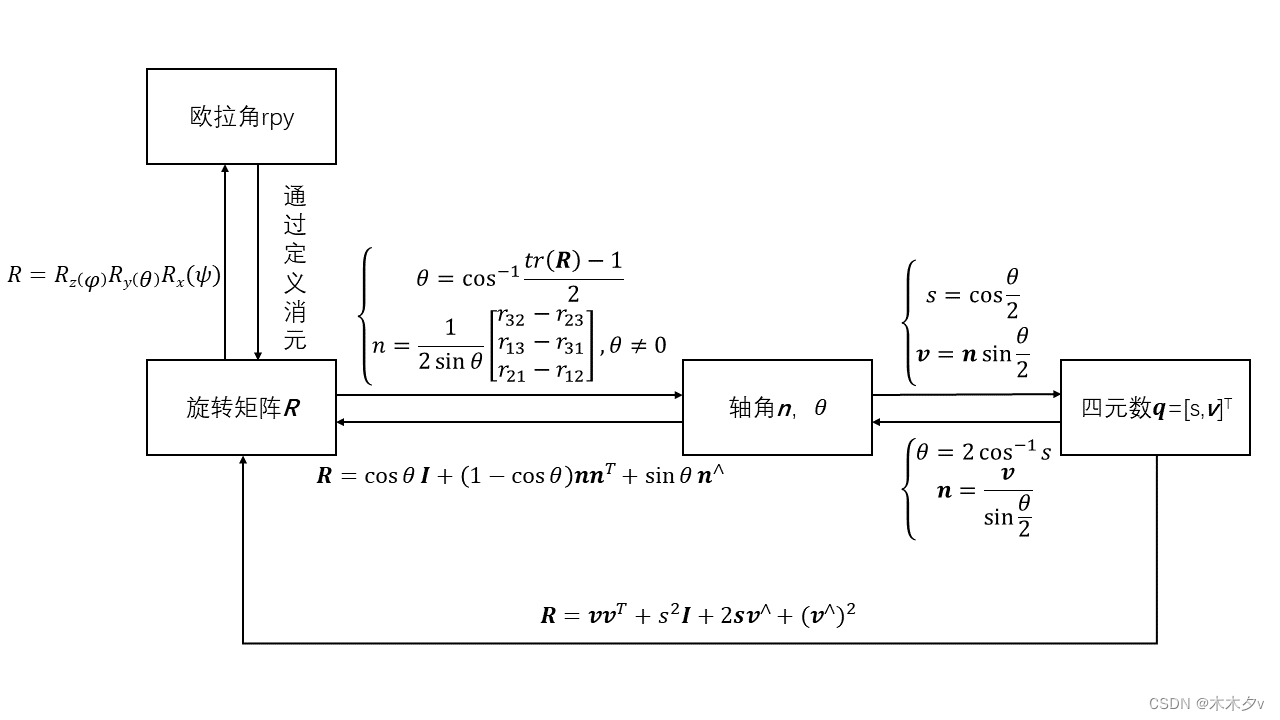
4. 画表总结旋转矩阵、轴角、欧拉角、四元数的转换关系。
5. 假设有一个大的 Eigen 矩阵,想把它的左上角 3 × 3 的块取出来,然后赋值为 。请编程实现。
。请编程实现。
#include<iostream>
//包含Eigen头文件
#include<Eigen/Core>
#include<Eigen/Geometry>
#define MATRIX_SIZE 100
using namespace std;
int main(int argc,char **argv)
{
//设置输出小数点后3位
cout.precision(3);
Eigen::Matrix<double,MATRIX_SIZE, MATRIX_SIZE> matrix_NN = Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);
Eigen::Matrix<double,3,3>matrix_33 = Eigen::MatrixXd::Random(3,3);//3x3矩阵变量
/*方法1:循环遍历矩阵的三行三列 */
/*
cout<<"提取出来的矩阵块为:"<<endl;
for(int i = 0;i < 3; i ++){
for(int j = 0 ;j < 3;j++){
matrix_33(i,j) = matrix_NN(i,j);
cout<<matrix_NN(i,j)<<" ";
}
cout<<endl;
}
matrix_33 = Eigen::Matrix3d::Identity();
cout<<"赋值后的矩阵为:"<<endl<<matrix_33<<endl;
*/
/*方法2:用.block函数 */
//提取后赋值为新的元素
matrix_33 = matrix_NN.block(0,0,3,3);
cout<<"提取出来的矩阵块为:"<<endl;
cout<< matrix_33<<endl;
matrix_33 = Eigen::Matrix3d::Identity();
cout<<"赋值后的矩阵为:"<<endl<<matrix_33;
return 0;
}
6. * 一般线程方程 Ax = b 有哪几种做法?你能在 Eigen 中实现吗?
#include<iostream>
#include<ctime>
#include <cmath>
#include <complex>
/*线性方程组Ax = b的解法(直接法(1,2,3,4,5)+迭代法(6))其中只有2 3方法不要求方程组个数与变量个数相等*/
//包含Eigen头文件
//#include <Eigen/Dense>
#include<Eigen/Core>
#include<Eigen/Geometry>
#include <Eigen/Eigenvalues>
//下面这两个宏的数值一样的时候 方法1 4 5 6才能正常工作
#define MATRIX_SIZE 3 //方程组个数
#define MATRIX_SIZE_ 3 //变量个数
//using namespace std;
typedef Eigen::Matrix<double,MATRIX_SIZE, MATRIX_SIZE_> Mat_A;
typedef Eigen::Matrix<double ,MATRIX_SIZE,1 > Mat_B;
//Jacobi迭代法的一步求和计算
double Jacobi_sum(Mat_A &A,Mat_B &x_k,int i);
//迭代不收敛的话 解向量是0
Mat_B Jacobi(Mat_A &A,Mat_B &b, int &iteration_num, double &accuracy );
int main(int argc,char **argv)
{
//设置输出小数点后3位
std::cout.precision(3);
//设置变量
Eigen::Matrix<double,MATRIX_SIZE, MATRIX_SIZE_> matrix_NN = Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE_);
Eigen::Matrix<double ,MATRIX_SIZE,1 > v_Nd = Eigen::MatrixXd::Random(MATRIX_SIZE,1);
//测试用例
matrix_NN << 10,3,1,2,-10,3,1,3,10;
v_Nd <<14,-5,14;
//设置解变量
Eigen::Matrix<double,MATRIX_SIZE_,1>x;
//时间变量
clock_t tim_stt = clock();
/*1、求逆法 很可能没有解 仅仅针对方阵才能计算*/
#if (MATRIX_SIZE == MATRIX_SIZE_)
x = matrix_NN.inverse() * v_Nd;
std::cout<<"直接法所用时间和解为:"<< 1000*(clock() - tim_stt)/(double)CLOCKS_PER_SEC
<<"MS"<< std::endl << x.transpose() << std::endl;
#else
std::cout<<"直接法不能解!(提示:直接法中方程组的个数必须与变量个数相同,需要设置MATRIX_SIZE == MATRIX_SIZE_)"<<std::endl;
#endif
/*2、QR分解解方程组 适合非方阵和方阵 当方程组有解时的出的是真解,若方程组无解得出的是近似解*/
tim_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
std::cout<<"QR分解所用时间和解为:"<<1000*(clock() - tim_stt)/(double)CLOCKS_PER_SEC
<< "MS" << std::endl << x.transpose() << std::endl;
/*3、最小二乘法 适合非方阵和方阵,方程组有解时得出真解,否则是最小二乘解(在求解过程中可以用QR分解 分解最小二成的系数矩阵) */
tim_stt = clock();
x = (matrix_NN.transpose() * matrix_NN ).inverse() * (matrix_NN.transpose() * v_Nd);
std::cout<<"最小二乘法所用时间和解为:"<< 1000*(clock() - tim_stt)/(double)CLOCKS_PER_SEC
<< "MS" << std::endl << x.transpose() << std::endl;
/*4、LU分解方法 只能为方阵(满足分解的条件才行) */
#if (MATRIX_SIZE == MATRIX_SIZE_)
tim_stt = clock();
x = matrix_NN.lu().solve(v_Nd);
std::cout<< "LU分解方法所用时间和解为:" << 1000*(clock() - tim_stt)/(double)CLOCKS_PER_SEC
<< "MS" << std::endl << x.transpose() << std::endl;
#else
std::cout<<"LU分解法不能解!(提示:直接法中方程组的个数必须与变量个数相同,需要设置MATRIX_SIZE == MATRIX_SIZE_)"<<std::endl;
#endif
/*5、Cholesky 分解方法 只能为方阵 (结果与其他的方法差好多)*/
#if (MATRIX_SIZE == MATRIX_SIZE_)
tim_stt = clock();
x = matrix_NN.llt().solve(v_Nd);
std::cout<< "Cholesky 分解方法所用时间和解为:" << 1000*(clock() - tim_stt)/(double)CLOCKS_PER_SEC
<< "MS"<< std::endl<< x.transpose()<<std::endl;
#else
std::cout<< "Cholesky法不能解!(提示:直接法中方程组的个数必须与变量个数相同,需要设置MATRIX_SIZE == MATRIX_SIZE_)"<<std::endl;
#endif
/*6、Jacobi迭代法 */
#if (MATRIX_SIZE == MATRIX_SIZE_)
int Iteration_num = 10 ;
double Accuracy =0.01;
tim_stt = clock();
x= Jacobi(matrix_NN,v_Nd,Iteration_num,Accuracy);
std::cout<< "Jacobi 迭代法所用时间和解为:" << 1000*(clock() - tim_stt)/(double)CLOCKS_PER_SEC
<< "MS"<< std::endl<< x.transpose()<<std::endl;
#else
std::cout<<"LU分解法不能解!(提示:直接法中方程组的个数必须与变量个数相同,需要设置MATRIX_SIZE == MATRIX_SIZE_)"<<std::endl;
#endif
return 0;
}
//迭代不收敛的话 解向量是0
Mat_B Jacobi(Mat_A &A,Mat_B &b, int &iteration_num, double &accuracy ) {
Mat_B x_k = Eigen::MatrixXd::Zero(MATRIX_SIZE_,1);//迭代的初始值
Mat_B x_k1; //迭代一次的解向量
int k,i; //i,k是迭代算法的循环次数的临时变量
double temp; //每迭代一次解向量的每一维变化的模值
double R=0; //迭代一次后,解向量每一维变化的模的最大值
int isFlag = 0; //迭代要求的次数后,是否满足精度要求
//判断Jacobi是否收敛
Mat_A D; //D矩阵
Mat_A L_U; //L+U
Mat_A temp2 = A; //临时矩阵获得A矩阵除去对角线后的矩阵
Mat_A B; //Jacobi算法的迭代矩阵
Eigen::MatrixXcd EV;//获取矩阵特征值
double maxev=0.0; //最大模的特征值
int flag = 0; //判断迭代算法是否收敛的标志 1表示Jacobi算法不一定能收敛到真值
std::cout<<std::endl<<"欢迎进入Jacobi迭代算法!"<<std::endl;
//對A矩陣進行分解 求取迭代矩陣 再次求取譜半徑 判斷Jacobi迭代算法是否收斂
for(int l=0 ;l < MATRIX_SIZE;l++){
D(l,l) = A(l,l);
temp2(l,l) = 0;
if(D(l,l) == 0){
std::cout<<"迭代矩阵不可求"<<std::endl;
flag =1;
break;
}
}
L_U = -temp2;
B = D.inverse()*L_U;
//求取特征值
Eigen::EigenSolver<Mat_A>es(B);
EV = es.eigenvalues();
// cout<<"迭代矩阵特征值为:"<<EV << endl;
//求取矩陣的特征值 然後獲取模最大的特徵值 即爲譜半徑
for(int index = 0;index< MATRIX_SIZE;index++){
maxev = ( maxev > __complex_abs(EV(index)) )?maxev:(__complex_abs(EV(index)));
}
std::cout<< "Jacobi迭代矩阵的谱半径为:"<< maxev<<std::endl;
//谱半径大于1 迭代法则发散
if(maxev >= 1){
std::cout<<"Jacobi迭代算法不收敛!"<<std::endl;
flag =1;
}
//迭代法收敛则进行迭代的计算
if (flag == 0 ){
std::cout<<"Jacobi迭代算法谱半径小于1,该算法收敛"<<std::endl;
std::cout<<"Jacobi迭代法迭代次数和精度: "<< std::endl << iteration_num<<" "<<accuracy<<std::endl;
//迭代计算
for( k = 0 ;k < iteration_num ; k++ ){
for(i = 0;i< MATRIX_SIZE_ ; i++){
x_k1(i) = x_k(i) + ( b(i) - Jacobi_sum(A,x_k,i) )/A(i,i);
temp = fabs( x_k1(i) - x_k(i) );
if( fabs( x_k1(i) - x_k(i) ) > R )
R = temp;
}
//判断进度是否达到精度要求 达到进度要求后 自动退出
if( R < accuracy ){
std::cout <<"Jacobi迭代算法迭代"<< k << "次达到精度要求."<< std::endl;
isFlag = 1;
break;
}
//清零R,交换迭代解
R = 0;
x_k = x_k1;
}
if( !isFlag )
std::cout << std::endl <<"迭代"<<iteration_num<<"次后仍然未达到精度要求,若不满意该解,请再次运行加大循环次数!"<< std::endl;
return x_k1;
}
//否则返回0
return x_k;
}
//Jacobi迭代法的一步求和计算
double Jacobi_sum(Mat_A &A,Mat_B &x_k,int i) {
double sum;
for(int j = 0; j< MATRIX_SIZE_;j++){
sum += A(i,j)*x_k(j);
}
return sum;
}

















 701
701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









