



使用Arduino UNO与Node微控制器单元(MCU)的自动可移动道路隔离栏
S. Sai Sri Vastava, B. Vandana⇑, Macha Bhavana, Rashmitha Gongati
部门电子与通信工程系,KG Reddy 工程与技术学院,海得拉巴,特伦甘纳邦,印度
摘要
本文的主要目的是了解反复出现的交通拥堵问题,并向社会提出预防性措施。通过占用空间来拓宽现有道路或建设新道路的做法,只会导致额外的严重交通流量增加。政府也限制新建道路或其他交通需求,因为城市中可用于交通的空间已经耗尽。本文提出了一种新型自动可移动交通道路分隔板的设计实施,用于易发生拥堵区域的疏解策略,而非沿用拓宽道路以缓解拥堵的传统机制。因此,本文旨在构建一种自动化道路分隔板,具备移动或调整车道方向以引导车流的功能。该设计可根据特定方向的交通流量灵活增加一个或多个车道。此类交通系统机制不仅能节省时间和燃料,还能减少污染,带来环保效益。
爱思唯尔有限公司。保留所有权利。
由科学委员会负责的遴选和同行评审国际纳米电子学、纳米光子学、纳米材料、纳米生物学与纳米技术会议。
1. 引言
如今,海得拉巴、孟买、德里等大都市每天都面临着日益严重的交通和拥堵问题。针对这些问题,已有多种不同的策略方法被应用。传统道路隔离栏的困难在于道路两侧的车道数量是固定的。由于资源有限,而人口以及每户家庭的机动车数量却在不断增加,因此需要一种有效的解决方案,能够在不进一步修建道路的前提下增加车道,通过引导车辆使道路具备灵活调整的能力。这种管理方式能够根据现有车道数量更有效地利用现有资源。道路隔离栏的另一侧通常为空置或未充分利用状态,这导致汽车拥有者浪费时间,造成交通堵塞以及资源的未充分利用。为此,本项目实施了自动道路隔离栏系统,以解决交通问题。道路隔离栏是通常用于分隔来往交通的道路[1]。
本文设计并实现了一种采用Aurdino UNO与Node MCU的可移动道路隔离栏,该隔离栏可根据交通流量自动移动。在许多情况下,道路一侧的固定道路隔离栏前会出现大量车辆拥堵,而另一侧则无车辆通行。为解决此问题,采用了可移动道路隔离栏,通过自动调节或移动隔离栏的位置来调整车道,从而为交通提供额外空间。此外,在需要时可通过移动隔离栏为救护车提供交通通行。该系统实现了交通管理的自动化,提升了应急服务效率,增强了安全性,并有效缓解了拥堵和减少了燃料消耗。
本文的结构安排如下:第1节为引言,介绍了多个主要城市的道路和交通问题,并阐述了自动道路隔离栏的重要性。第2节为文献综述,讨论了采用多种技术方法的可移动道路隔离栏的现有系统设计。第3节和第4节简要介绍了proposed系统设计方法和结果,解释了使用Aurdino UNO与Node MCU的自动道路隔离栏的实施和工作原理。最后得出了结论。
2. 文献综述
日常通勤者在道路上每天出行时,都会在高峰时段面临严重的交通问题,导致到达目的地的时间延迟。为解决这一问题[2],提出了一种技术方案,即在高峰时段交通积聚之前,使用重型车辆移动道路隔离栏。该方法所采用的道路隔离栏转移机械,也被称为隔离带移动车,是一种用于移动混凝土车道隔离栏的重型车辆。这种做法能够重新分配车道,以适应当前主导方向上增加的交通流量。这些隔离栏通过钢制连接件相互连接,形成坚固但具有柔性的安全屏障。可移动隔离栏已在奥克兰、蒙特利尔、加拿大、费城、宾夕法尼亚州、纽约等城市长期投入使用。
使用这些机械时,整段分隔板会根据交通密度向左或向右移动,这反而成为该机制的一个缺点[3]。世界上第二人口密集的国家是一个快速发展中的经济体,其城市正面临日益严重的道路拥堵问题。由于住房和价格限制,基础设施建设速度远低于车辆数量的增长速度。针对孟买现状制定交通解决方案的指导方针以及相关研究[3,4]。已有多种研究提出了不同的技术方案,例如安装超声波传感器检测交通拥堵情况:当出现拥堵时,分隔板将升起并延伸;若无交通,则保持在地面水平[5]。基于此,已启动一个项目,构建三维仿真模型,将各组件集成以运行仿真,旨在减少车辆与道路隔离栏之间的拥堵[6]。随着技术的进步,各种应用不断涌现,在此背景下,提出一种基于LIDER检测方法的道路及道路边缘识别方案,用于自动驾驶车辆的道路区域识别[7]。随后,安装摄像头采集信息,并将其发送至云平台以分析交通流[8]。根据交通流情况,设计了包含可逆车道的系统,用以观察其在减轻交通负荷方面的效率、应急可逆车道的利用情况,并比较常规车道与可逆车道之间的交通状况[9]。该系统结构采用微控制器设计,可识别车辆状态,并将每辆车的信息提供给收发器[3]。通过图像处理[10],系统控制交通信号灯,从而识别车辆并捕获摄像头图像,而非依赖嵌入路面的电子传感器,除引用外,参考文献比例应低于5%。
3. Proposed 系统设计方法
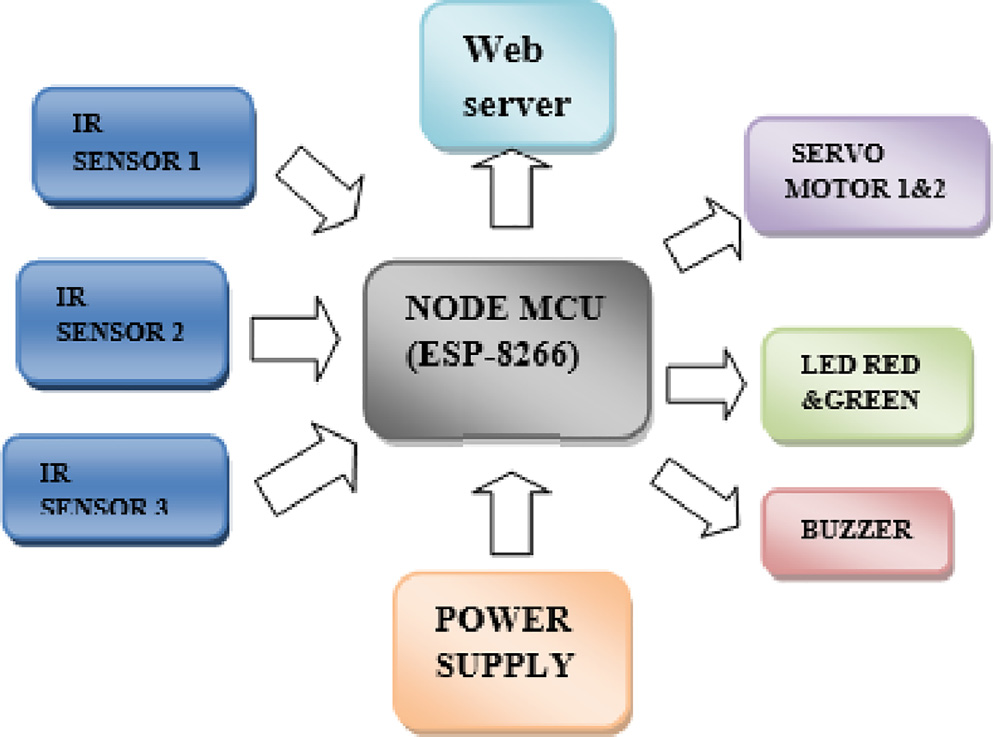
所提出的设计包括Aurdino UNO与Node MCU的接口,图中展示了图1节点微控制器单元(Node Microcontroller Unit)的接口板。该设计利用了开源软件以及围绕一种名为ESP8266的低成本片上系统(SoC)构建的硬件开发环境。ESP8266由Espressif Systems设计和制造,包含现代计算机的所有关键组件:中央处理器、内存、网络(无线网络),甚至具备现代操作系统和软件开发工具包。
它利用三个红外传感器来检测10厘米范围内的交通密度,这些传感器将数字数据传递给Arduino Uno主板和节点MCU ESP8266 WiFi模块。这些传感器连接到Arduino开发板的D2 D3 和 D4 引脚。生成的代码被烧录到开发板上,用于根据传感器输入监测交通密度。根据红外传感器的检测结果,伺服电机与传感器相连,从而按照传感器提供的密度信息移动道路隔离栏。ESP‐01 WiFi模块用于向交通控制室发送数据并相应地执行操作。所提出的系统设计采用5V直流电源,通过240V输入的适配电路,经LM2560 DC‐DC降压电路调节后输出9V直流输出,以稳定提供5V直流电源。
简单来说,所提出的系统包含以下模块:
1. 通信模块:GSM/WiFi模块。
2. 处理模块:如图1所示的Node MCU。
3. 电机驱动模块:用于根据输入控制和驱动电机。
根据交通密度,道路隔离栏向前或向后移动,以减少交通拥堵。道路隔离栏配备有红外传感器,能够感应靠近隔离栏的物体,并在车辆靠近时停止隔离栏的移动,从而发挥作用。

4. R结果与讨论
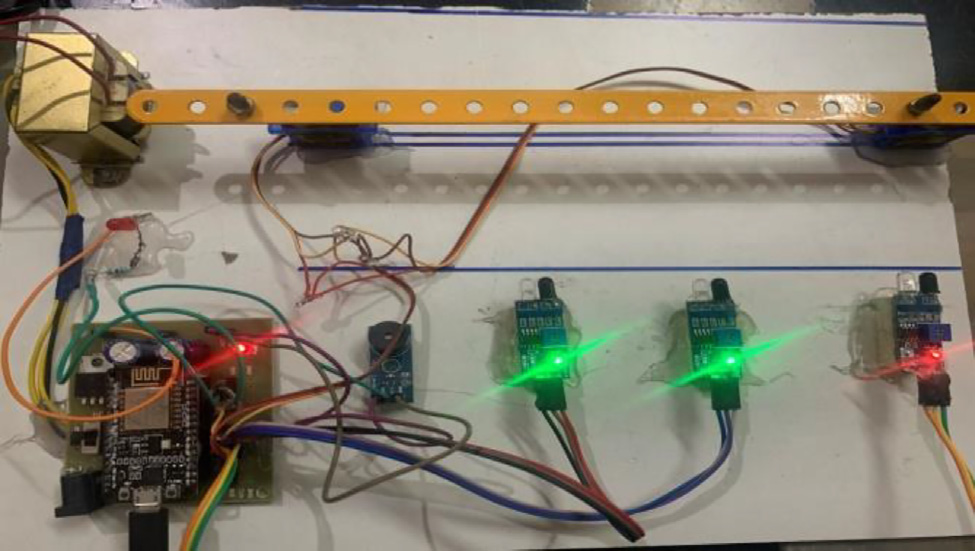
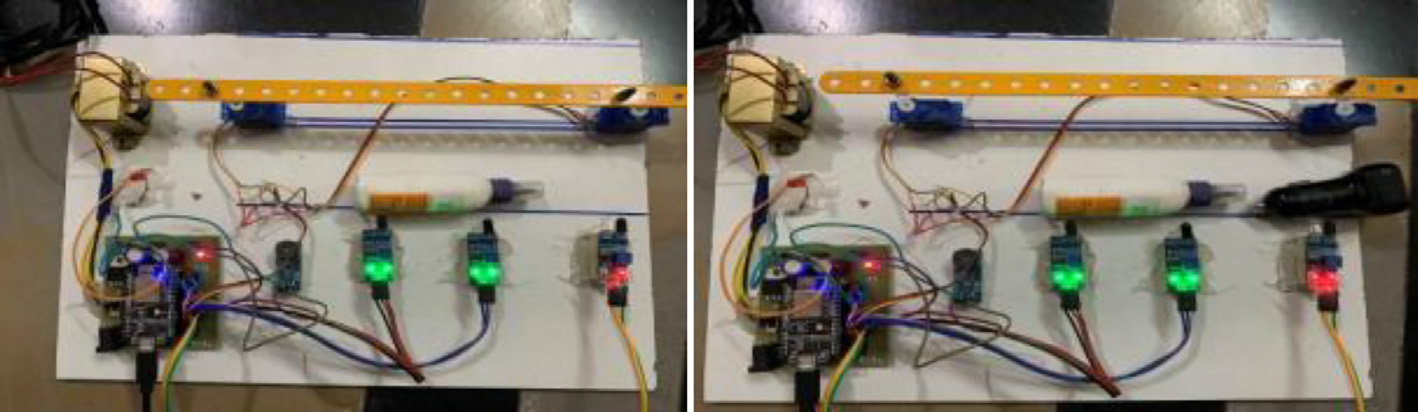
原型的工作原理考虑了莫伊纳巴德路的实时交通密度。当红外传感器被触发时,分隔板会根据交通密度移动。在图3中,模块是已连接到电源,并处于待机状态以连接到个人热点。设备未连接到个人热点时的输出。
在图4中,设备已连接到热点并处于完全功能状态。当红外传感器检测到交通密度时,分隔板会根据密度向右侧移动。当传感器1和2被触发时,分隔板略微向右侧移动;当所有三个传感器都被触发时,分隔板完全向右侧移动。
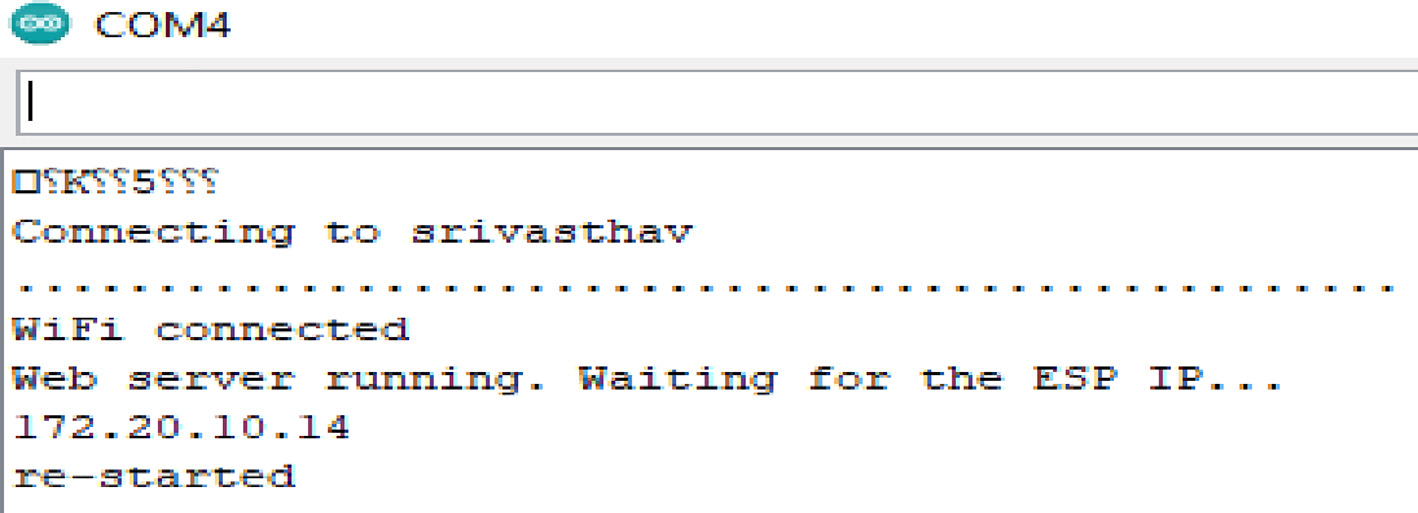
在图5中,有关触发级别的信息显示在Arduino Uno软件的串行监视器中。此处的输出严格按照触发级别显示。在图6和图7中,设备通过IP“172.20.10.14”连接到分隔板。交通密度通过任意方式监控通过IP连接的设备。由于这是一个演示模型,我们通过使用红外传感器展示单向交通的方式。传感器的数据会自动发布到网络服务器。
5. C结论
现有的系统,例如拉链式机器,类似于一辆大型卡车,其移动需要人工操作,在交通几乎停滞的情况下也不适用。proposed system通过使用网络门户手动控制道路车道分隔系统的移动,消除了现有系统的局限性。这将提供实时访问,克服拉字机机器的缺点。当道路一侧交通量较大时,该分隔板可用于移动一个或多个车道,使道路更宽以应对更多车流。该系统可实现全自动(使用 Node MCU、红外传感器 和 伺服电机),也可通过手动方式(蜂鸣器 或 指示灯)提醒出行者,从而掌握并控制交通状况。这将有助于调节车流高峰,使交通得到相应控制。
利益冲突声明
作者声明,他们不存在已知的可能影响本文所报道工作的竞争性财务利益或个人关系。

















 1520
1520

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









