




 本文详细记录了使用树莓派4B安装Buster系统的全过程,包括镜像获取、烧写、初始设置、远程连接配置及镜像源更换等关键步骤。
本文详细记录了使用树莓派4B安装Buster系统的全过程,包括镜像获取、烧写、初始设置、远程连接配置及镜像源更换等关键步骤。
树莓派4B安装Buster系统
之前在树莓派(1):树莓派安装系统介绍了树莓派系统的安装方法,其内容大多是上个学期的记录内容。
今天实战了一下,用了最新的树莓派4B(4G内存)和19年9月份更新的Buster镜像发现还是有所变动的,算是简洁了很多吧,在此记录一下。
PS:本次只记录我的实战操作,更多说明还是看树莓派(1):树莓派安装系统比较好:)
0. 获取镜像
首先,进入官方下载页面,我选择了Raspbian Buster with desktop进行下载
1. 烧写镜像
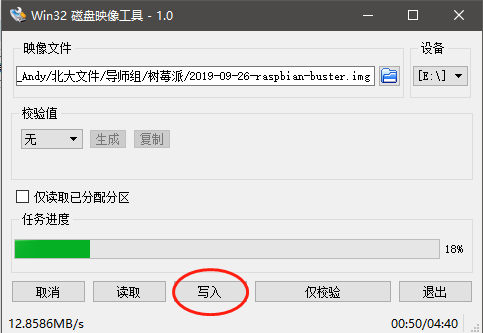
镜像解压后,用Win32 Disk Imager 将镜像文件写到Micro SD卡中.
记得是点写入而不是读取(是不是同时学会怎么保存镜像了hhh)
写入成功后,可以看到电脑的设备和驱动器产生了相应变化
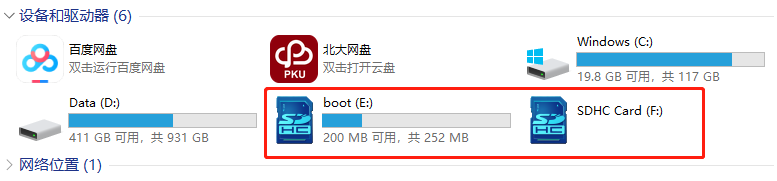
将SD卡安全弹出:)
2. 开机
SD卡插入树莓派,上电,系统会自动进行安装。
开机界面如下
2.1 初始设置
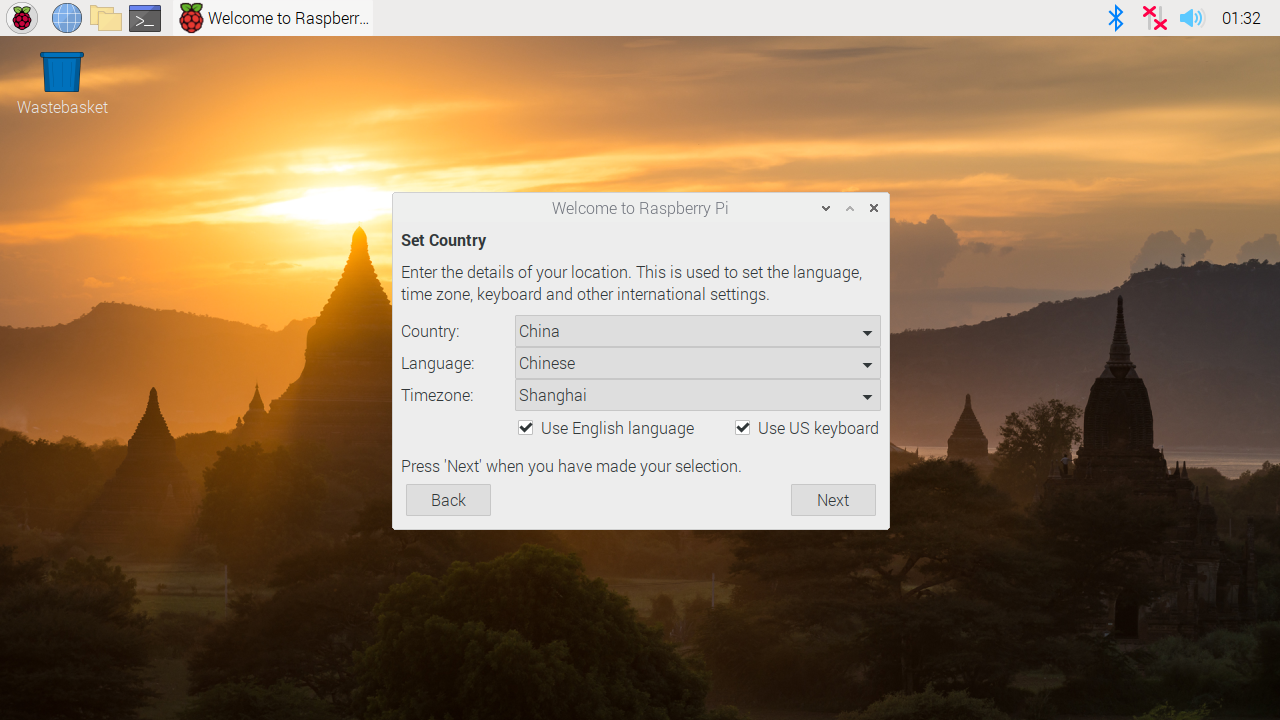
接下来进行一些初始设置,点击Next,选择国家、语言、键盘布局
(树莓派是英国产品,默认键盘布局是英国(GB),我们用的键盘布局一般是美国(US)的)
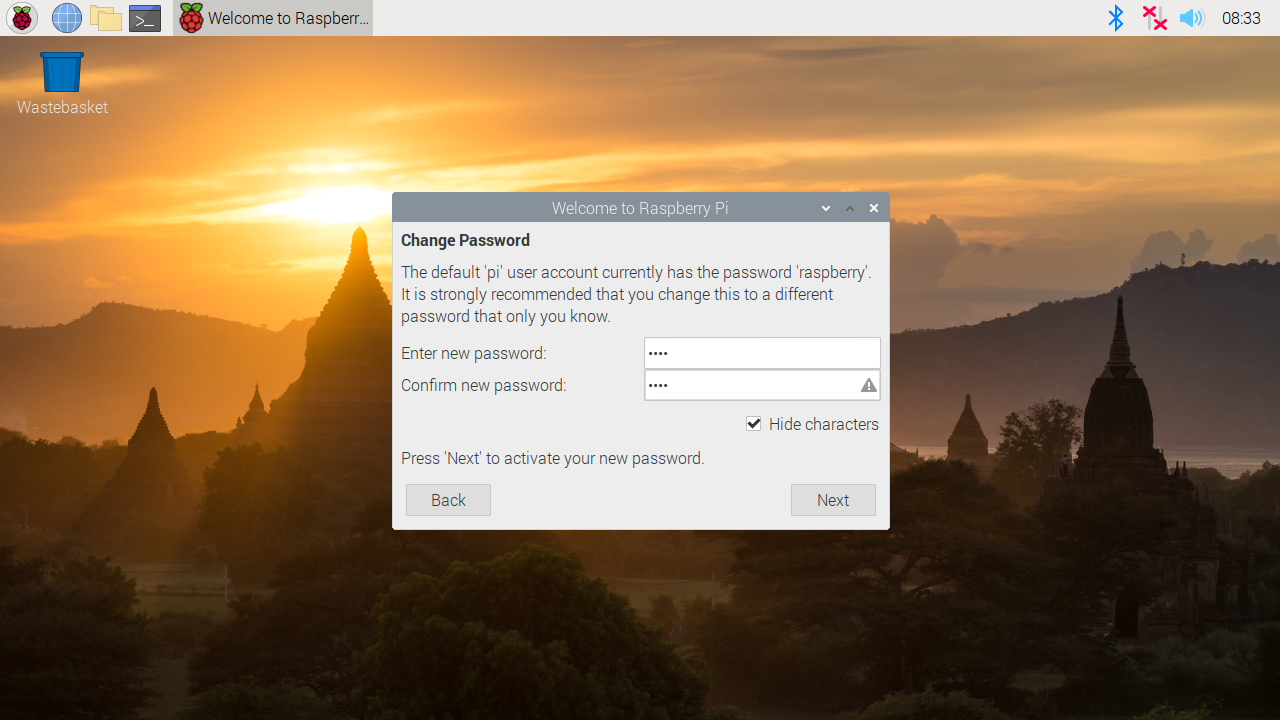
安全意识还是要有的,接下来修改原始密码——
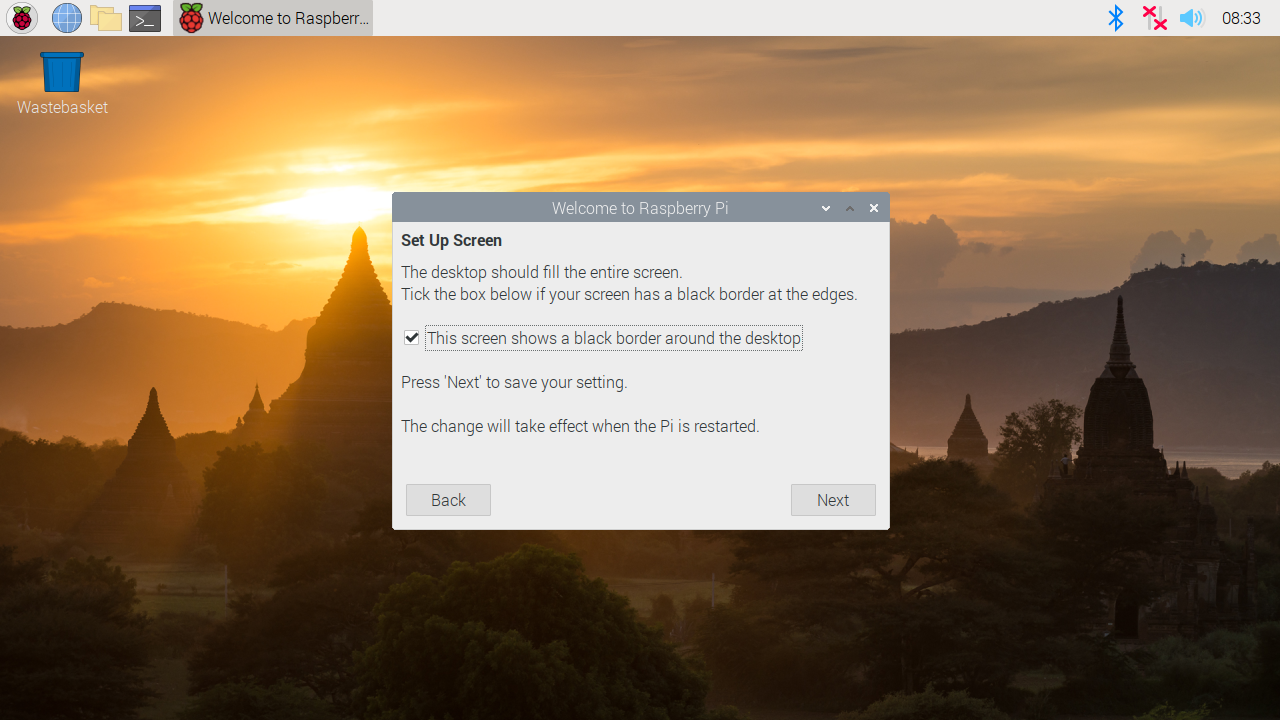
下一步根据你的情况而定,我的是有黑边框的,所以就勾选了进行调整一下——
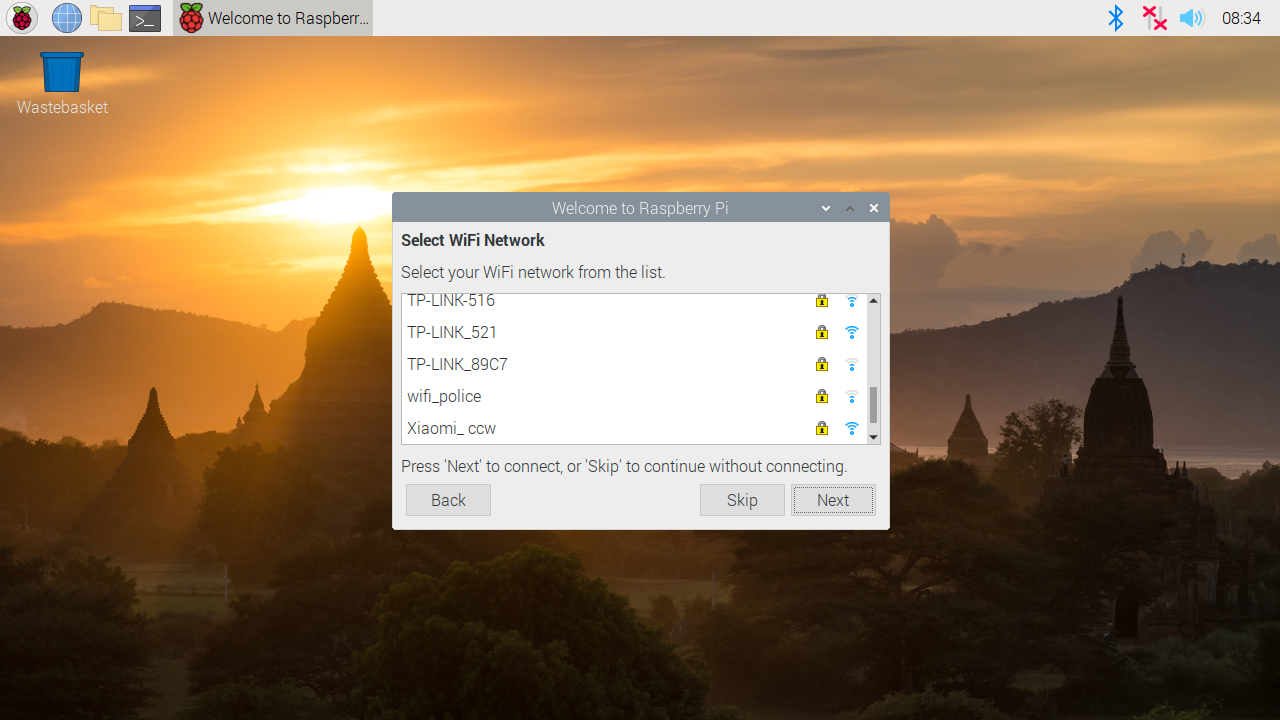
上一步调整重启后才有效,不必着急没有效果。下一步,连接WiFi,很简单,不多说了
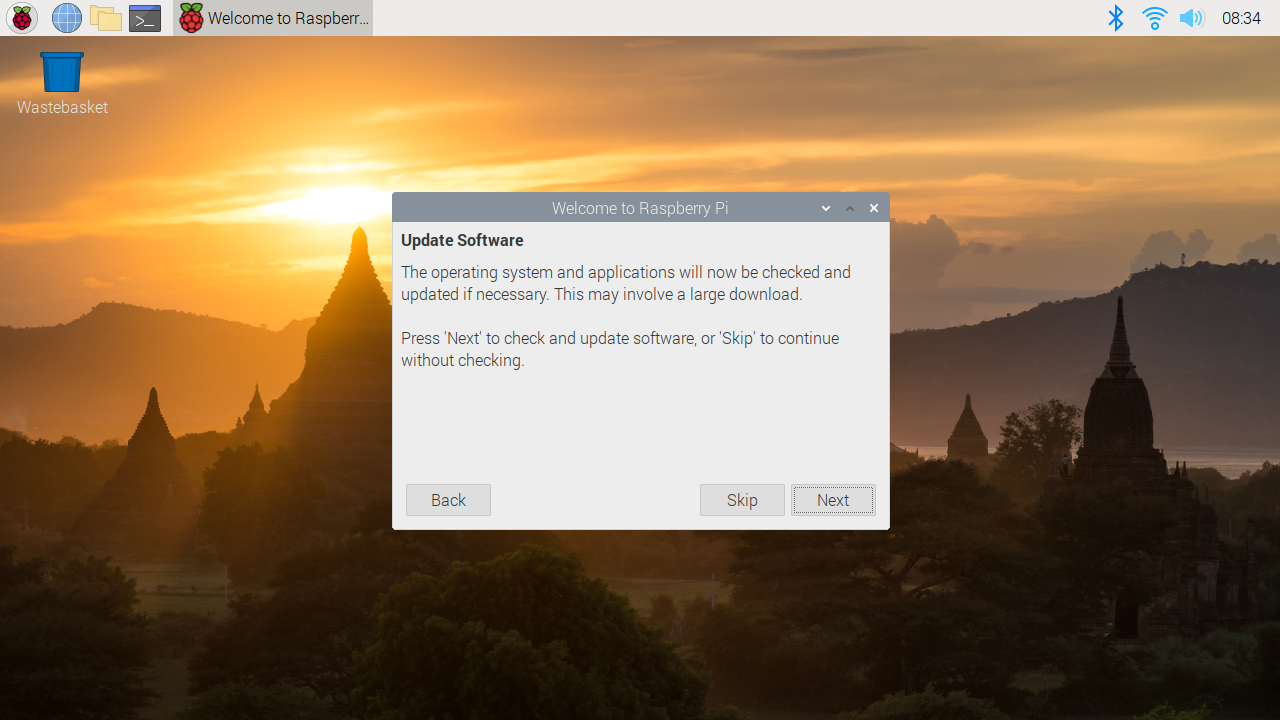
下一步,更新软件,这一步可能耗时比较长,我当时担心没有换源速度会很慢就跳过了(然而后面出现的状况让我有点惊讶hhh,后面安装xrdp的时候会写到),此时要不要更新看你自己,强烈建议先跳过,换源后再更新。
最后一步,完成设置!此时不要急着Restart,点击Later,把我们的事情搞完了再重启吧。
点击左上角树莓派 --> Preference --> Raspberry Configuration,
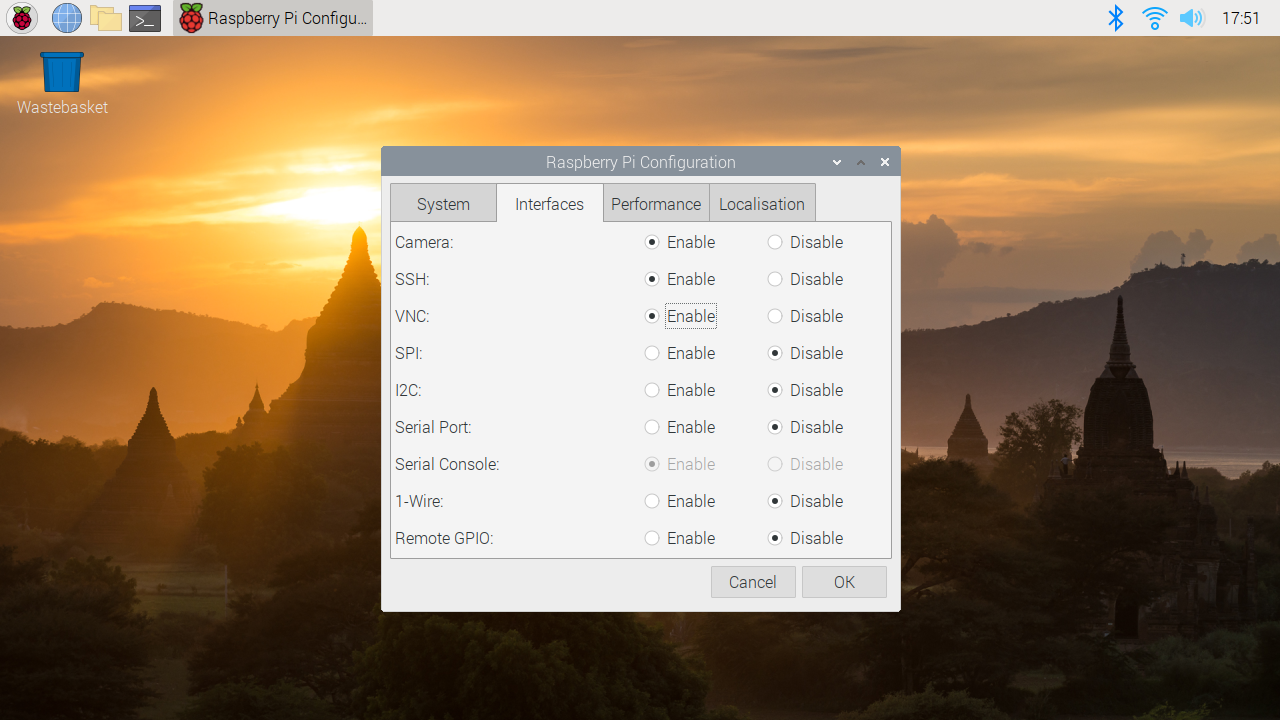
为了SSH连接和远程桌面,我开启了SSH和VNC,后期用到摄像头,所以把Camera也开启了
关于GPU的分配,可以看我之前整理的树莓派(0):树莓派基础知识。
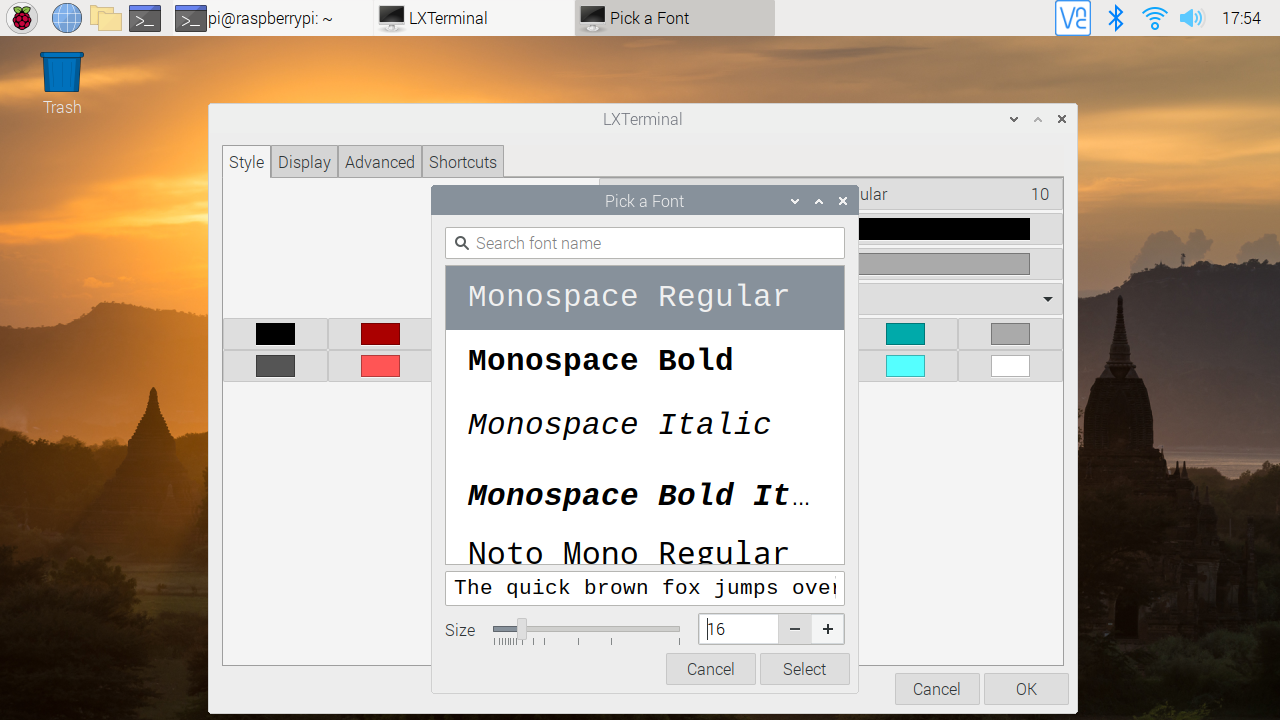
2.2 调整终端
Ctrl + Alt + T 调出终端后,发现字体有点小,先设置一下吧——
点击终端菜单栏的Edit --> Preference,增大一下字体Size。
终端输入sudo reboot进行重启
3. 设置远程连接
3.1 SSH连接
在刚才的操作中,我已经开启了SSH服务,直接连就好了
终端输入ip addr或者ip config查看IP
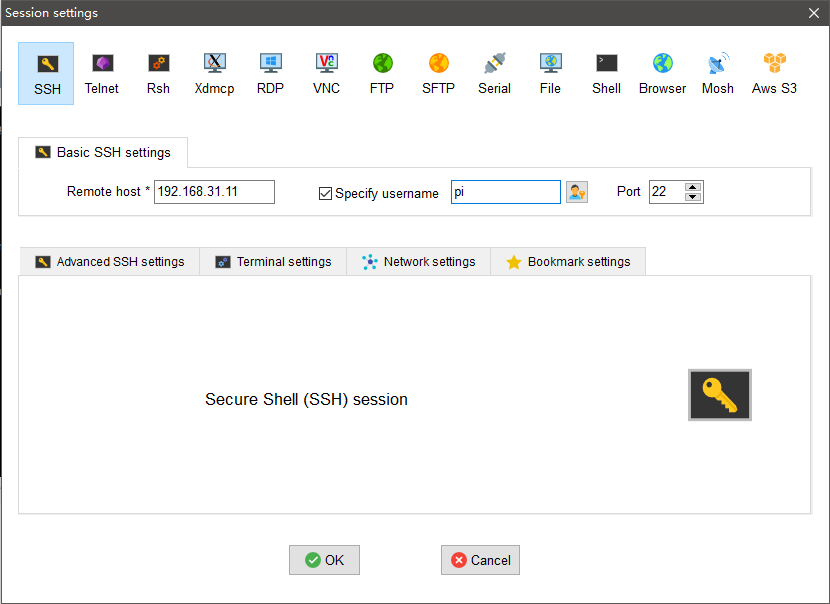
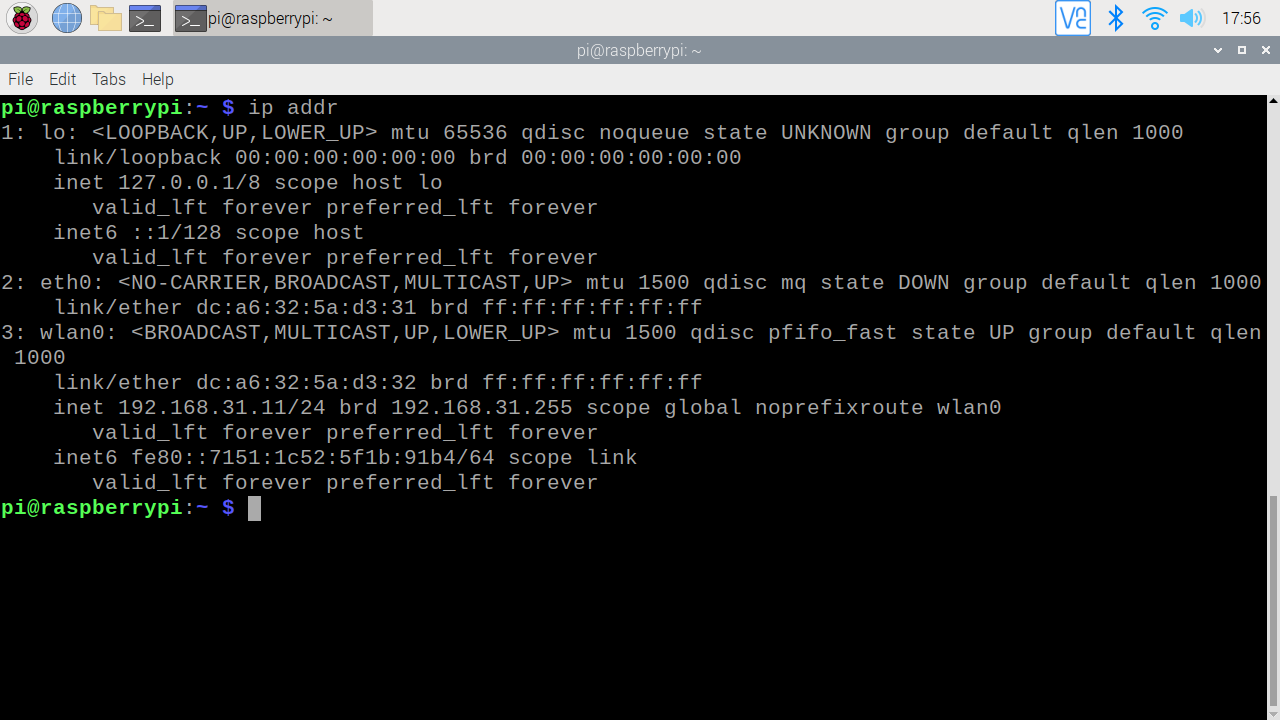 可以看到IP为192.168.31.11,打开MobaXterm,新建一个Session,成功连接。注意:电脑和树莓派连接的是一个WIFI。
可以看到IP为192.168.31.11,打开MobaXterm,新建一个Session,成功连接。注意:电脑和树莓派连接的是一个WIFI。
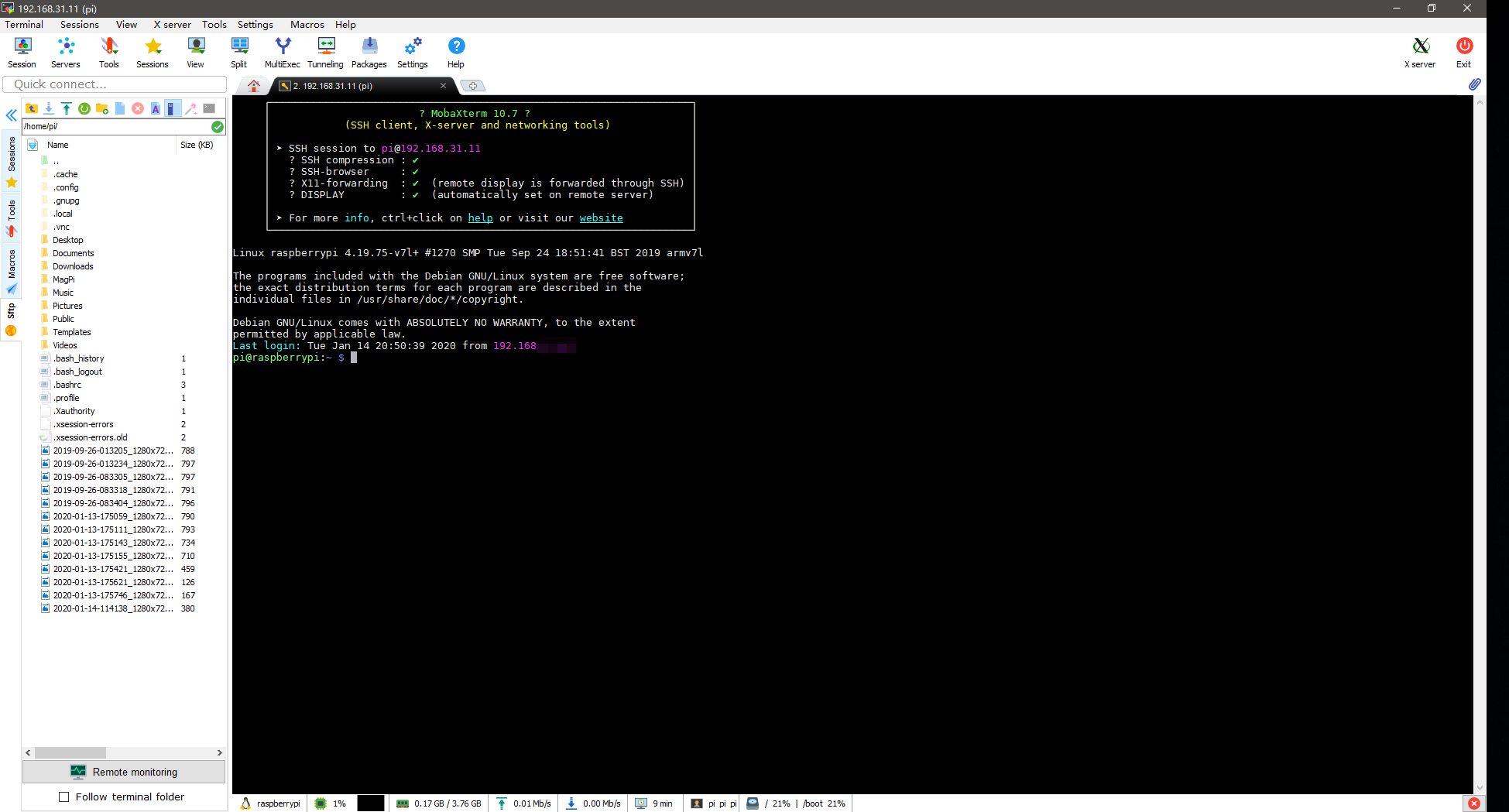
Okay,SSH成功连接,树莓派可以不接显示屏了
3.2 远程桌面
我习惯通过xrdp远程桌面访问系统,
首先要在 Raspian中安装 xrdp服务:sudo apt-get install xrdp
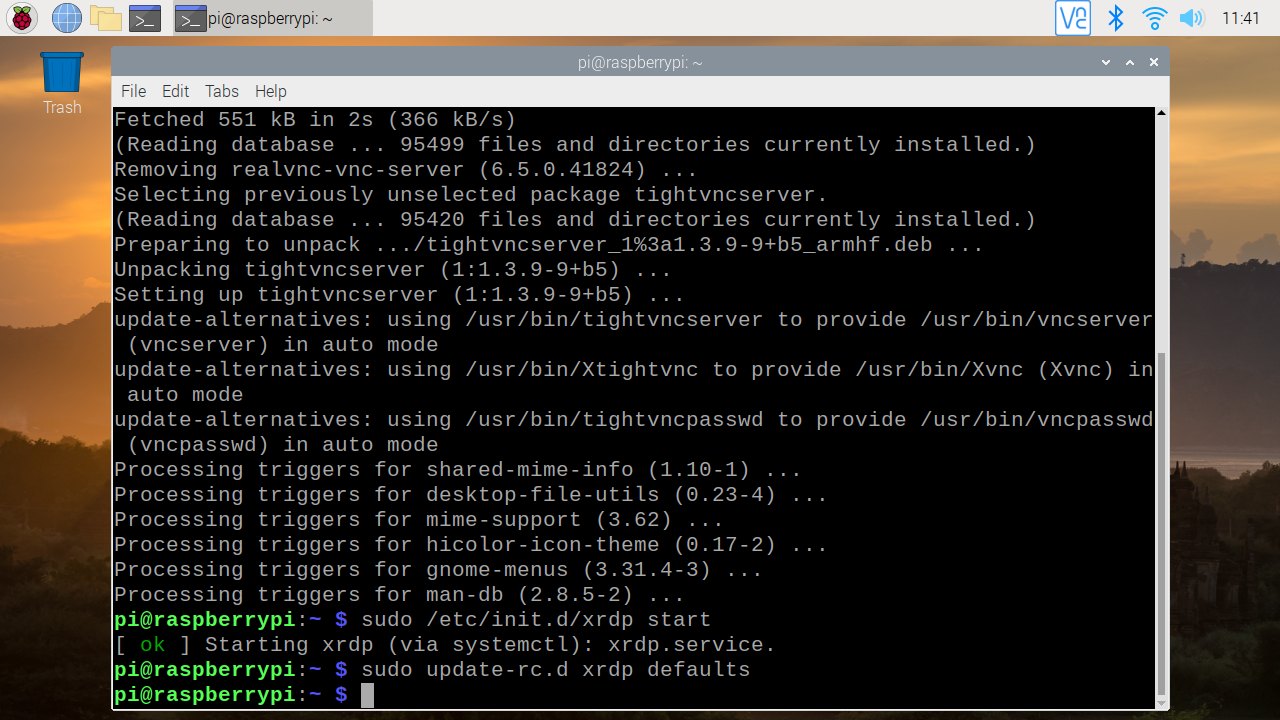
安装VNC: sudo apt-get install tightvncserver
启动xrdp服务:sudo /etc/init.d/xrdp start
将xrdp服务加入到系统默认启动服务中:sudo update-rc.d xrdp defaults
打开MobaXterm,新建一个Session
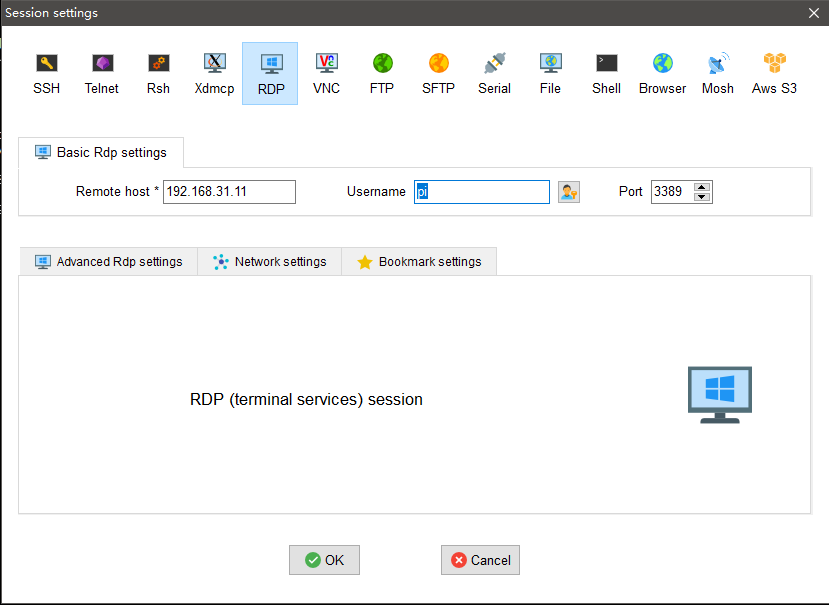
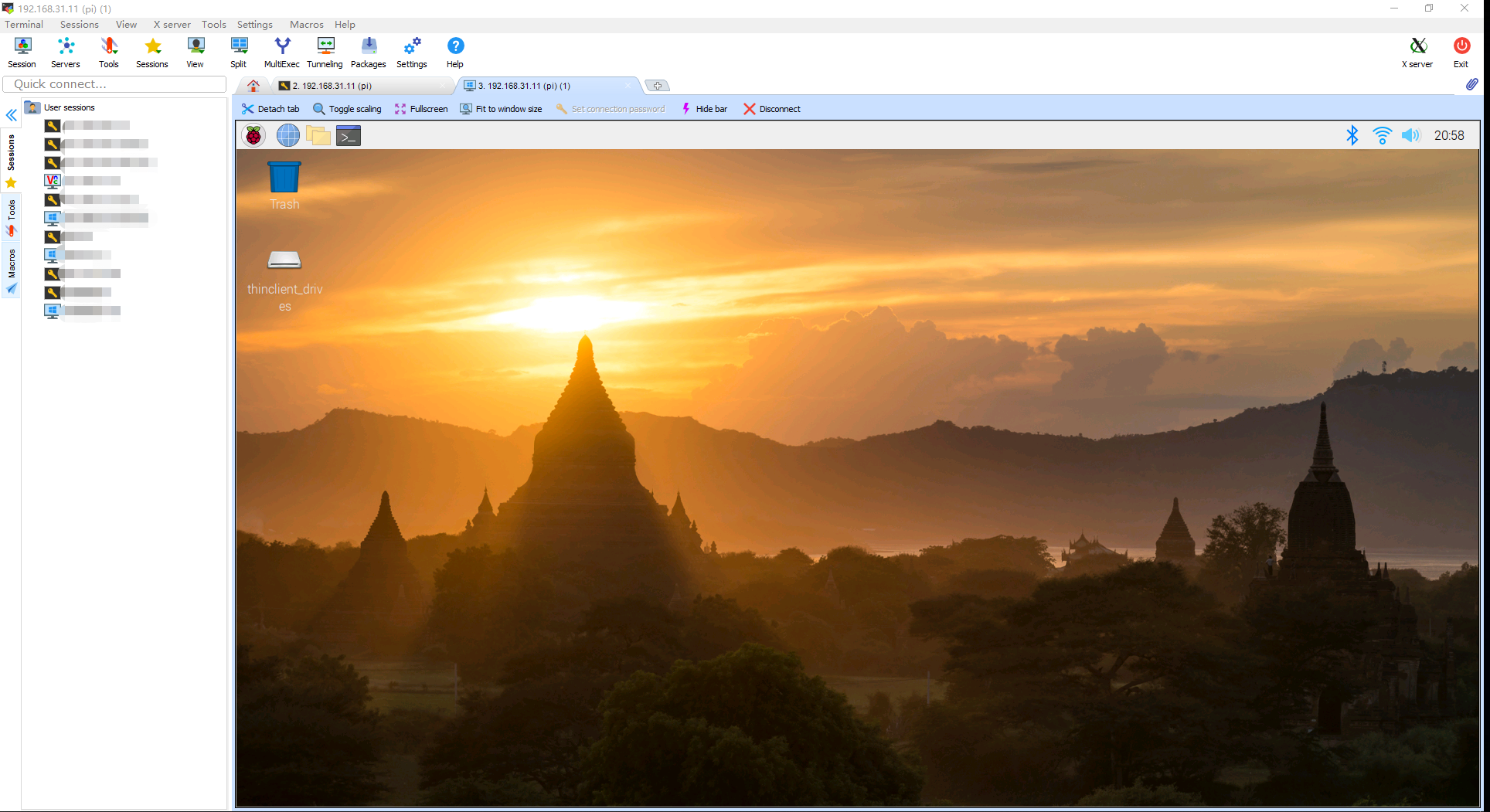
Okay,远程桌面也安装好了!
4. 关于镜像源
4.1 还需要换源吗?
大家有没有奇怪我并没有更换镜像源?
主要是让我比较吃惊的一点是,在我并没有更换镜像源的情况下,上一步安装xrdp的时候,出现了这样的场景——
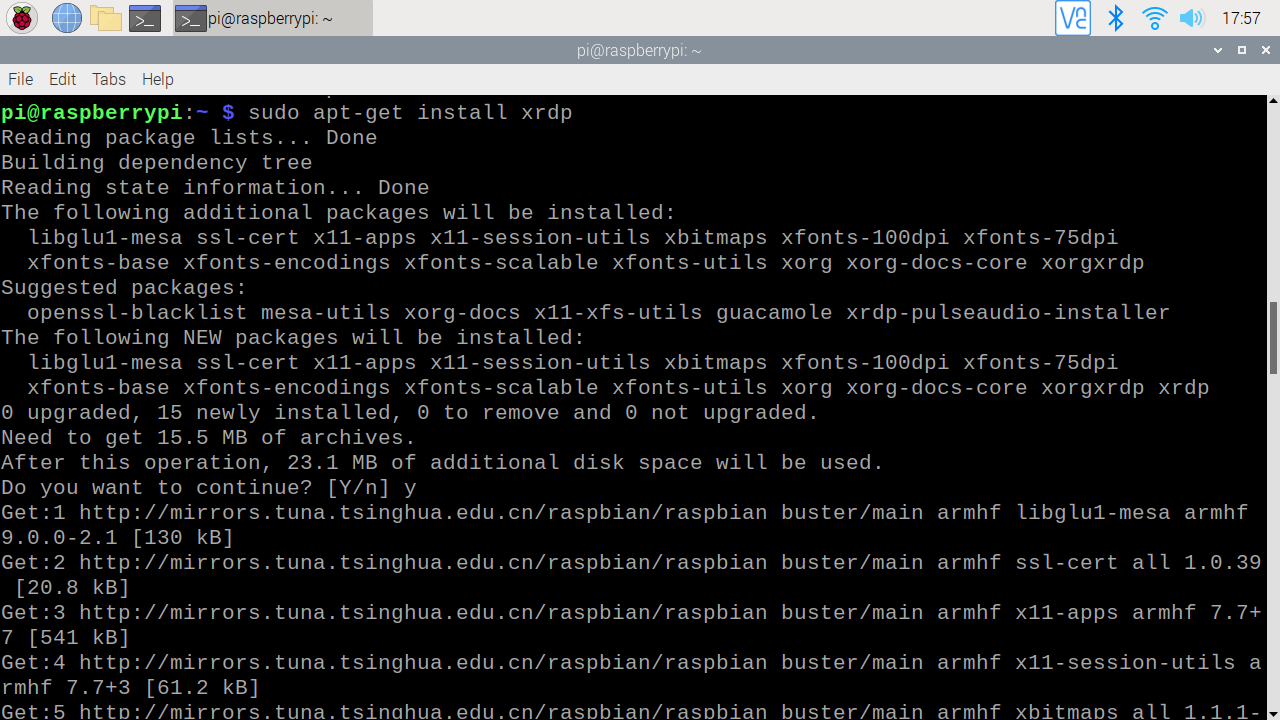
这已经给换好了?可是查看/etc/apt/sources.list,明明还是

暂时不深究了,虽然不在把控之中,至少不是一件坏事:)
不过,当我执行sudo apt-get update的时候,发现速度还是以B为单位时,还是换一下源比较好。。。

4.1 换镜像源步骤
换源方法:我不太喜欢用nano和vi,先安装vim指令:
$ sudo apt-get remove vim-common
$ sudo apt-get install vim
-
打开配置sources.list文件
sudo vim /etc/apt/sources.list -
点击i按键进入insert模式,用#注释掉原文件内容,用以下内容取代
deb http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main contrib non-free rpi
deb-src http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main contrib non-free rpi
按Esc,输入:wq保存并退出
- 打开配置raspi.list文件
sudo vim /etc/apt/sources.list.d/raspi.list - 点击i按键进入insert模式,用#注释掉原文件内容,用以下内容取代
deb http://mirror.tuna.tsinghua.edu.cn/raspberrypi/buster main ui
deb-src http://mirror.tuna.tsinghua.edu.cn/raspberrypi/buster main ui
按Esc,输入:wq保存并退出
- 编辑镜像站后,更新升级
sudo apt-get update
sudo apt-get upgrade
(update是更新软件列表,upgrade是更新软件)
这一次速度飞快:)
5. 写在后面的话
这是我用树莓派4B安装Buster版本镜像的步骤,其中关于镜像问题没有深究,还望懂这个问题的大佬回复一下:)
本次只记录我的实战操作,更多说明还是看树莓派(1):树莓派安装系统比较好:)
有问题多交流,可留言可发邮件,我的邮箱是zhaodongyu艾特pku(这里换成点)edu.cn。

















 5091
5091



 到【灌水乐园】发言
到【灌水乐园】发言







