




[文献阅读]基于地磁矢量的改进迭代最近轮廓点匹配导航算法
论文信息
论文题目:Improved Iterative Closest Contour Point Matching Navigation Algorithm Based on Geomagnetic Vector
作者:Yuan Ren 12, Lihui Wang123, Kunjie Lin2, Hongtao Ma4 and Mingzhu Ma2
Electronics 2022, 11(5), 796; 原文链接
Submission received: 26 January 2022 / Revised: 19 February 2022 / Accepted: 1 March 2022 / Published: 3 March 2022
(This article belongs to the Special Issue Recent Advances in Intelligent Transportation Systems)
Abstract
现存问题:
- 基于迭代最近轮廓点(ICCP)算法的地磁匹配辅助定位系统可以抑制惯性导航系统的累积误差,实现车辆的精确定位。然而ICCP算法对航向误差敏感并在地磁特征相似区域容易出现匹配错误,影响了定位的准确性和效率。
改进方案:
- 本文提出了一种基于地磁矢量的改进ICCP算法。该算法结合了蚁群算法以优化大概率范围内的搜索策略,并使用地磁三维矢量特征和Hausdorff距离作为目标函数进行多次迭代,从而提高匹配效率和精度。
改进效果:
- 仿真结果表明,与传统ICCP算法相比,改进后的算法将匹配轨迹的定位误差、航向误差和匹配时间分别减少了69.6%、44.0%和39.0%。
Introduction
根据文章的Introduction部分,当前地磁匹配算法存在以下主要问题:
-
误差累积问题:惯性导航系统(INS)的测量误差会随时间累积,导致导航精度下降,因此需要地磁导航的辅助校正。然而,现有算法的精度在特定条件下(如地磁特征相似区域)容易受到影响。
-
航向误差敏感:基于迭代最近轮廓点(ICCP)的匹配算法对航向误差较为敏感。在存在航向偏差的情况下,算法容易产生匹配误差,从而影响导航的准确性。
-
匹配错误问题:在地磁特征相似的区域(如地磁强度变化不明显的区域),ICCP算法难以准确区分匹配点,导致低匹配精度或匹配错误。
-
复杂度高:ICCP算法采用全局最优搜索来实现匹配,其复杂度较高,计算效率较低,尤其是在搜索大范围匹配点时,计算资源消耗较大。
这些问题限制了地磁匹配算法在复杂环境中的应用,因此需要改进搜索策略和匹配方法以提升其效率和准确性。
因此,本文提出了一种蚁群优化(ACO)算法,以改进高概率范围内的搜索区域和搜索过程,从而提高匹配效率。为了改善算法在总地磁强度特征变化不显著区域的匹配错误现象,结合地磁场的矢量特性,算法使用三维地磁强度作为改进匹配算法的目标函数,从而更全面地描述匹配过程中相似度,显著降低了匹配结果的定位误差和航向误差,有效提升了算法的匹配效率和精度。
Materials and Methods
Navigation Algorithm for Geomagnetic Matching
地磁匹配导航算法的基本框图如图1所示。预先规划的行驶区域地磁场匹配特征量被绘制成参考地图,并存储在计算机的数据库中。然后,当载体经过该区域时,载体上的地磁测量装置实时测量这些点的匹配特征量,从而获得实时地图。通过将测量数据与参考地图进行匹配,确定载体的实时位置,并补偿惯性导航系统的累积误差,从而实现高精度的自主导航。

这张图展示了地磁匹配导航算法的基本流程,具体步骤如下:
-
地磁检测模块:使用磁力计进行数据测量,通过数据处理得到地磁测量数据,作为后续导航匹配的输入。
-
地磁数据库模块:地磁模型提供基准信息,经过数据提取处理后,生成用于匹配的参考地图数据。
-
地磁匹配算法:将地磁检测模块提供的实时测量数据与数据库中的基准信息进行匹配,以确定当前载体的位置。
-
集成导航滤波器:将地磁匹配算法生成的位置数据与惯性导航系统(INS)数据进行融合,校正惯性导航系统的累积误差。
-
输出位置结果:经过集成导航滤波后的位置数据作为最终的导航输出,用于实现高精度的自主定位。
此流程确保实时地磁测量数据与参考地图匹配,补偿惯性导航系统的误差,从而实现高精度定位。
ICCP算法通过迭代最近点来实现测量图像与模型之间的匹配,并以欧几里得距离的平方最小化作为目标函数,从而获得测量轨迹与真实轨迹之间的最佳匹配,以校正测量轨迹。

算法的原理如图2所示,其中 C i C_i Ci( i = 1 , 2 , 3... N i = 1, 2, 3... N i=1,2,3...N)为磁场轮廓, P i P_i Pi( i = 0 , 1 , 2 , 3... N i = 0, 1, 2, 3... N i=0,1,2,3...N)为惯性导航指示的轨迹序列, Y i Y_i Yi( i = 1 , 2 , 3... N i = 1, 2, 3... N i=1,2,3...N)为匹配目标序列, X i X_i Xi( i = 1 , 2 , 3... N i = 1, 2, 3... N i=1,2,3...N)为实际轨迹序列。通过刚性变换最小化目标函数的欧几里得距离,算法在目标函数变换小于阈值或达到最大迭代次数时结束。
地磁ICCP匹配算法基于以下两个假设。
假设1:地磁传感器没有测量误差。
在实际应用中,传感器不可避免地存在误差,无法满足假设1。
假设2:载体的真实位置位于与测量的磁场值对应的轮廓上。
当车辆行驶区域中没有可选择的自适应区域时,由于刚性变换的影响,ICCP算法容易受到惯性导航系统累积误差的影响。随着导航时间的增加,每个测量点的定位误差也会增加,惯性导航指示的轨迹逐渐偏离真实轨迹。在这些情况下,如果假设2不成立,使用ICCP算法进行迭代变换的匹配误差将持续增加。
Vector Improved Algorithm for ICCP Matching
为满足ICCP匹配算法的假设2,对传统ICCP算法进行了两方面的改进。
- 首先,设计了蚁群优化(ACO)算法,以改进在高概率范围内的搜索策略。
- 其次,考虑到匹配区域的地磁总特征非常相似,ICCP算法容易出现匹配精度低或匹配错误的问题。通过使用地磁三维特征来改进目标函数,将其定义为匹配指标。
Improvement of Search Area
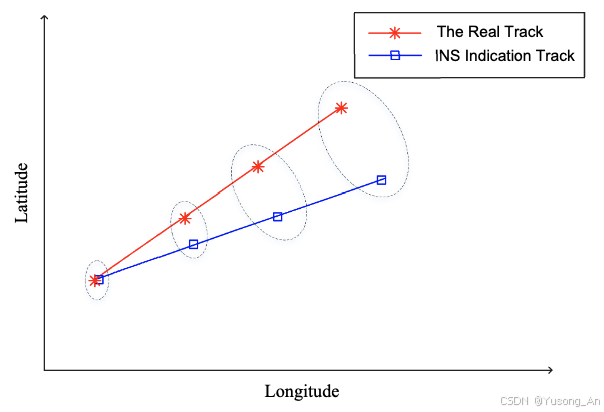
ICCP算法是一种在全局范围内寻找最优对齐的方法。由于在整个地图上搜索轮廓线上的最近点,因此其效率相对较低。考虑到惯性导航系统(INS)的累积误差,在惯性导航指示的轨迹附近添加了误差的上下限,以限制搜索范围,使得真实轨迹更有可能落在待匹配的区域内。建立的搜索模型如图3所示,黑色虚线椭圆区域是基于AUV指示坐标的误差椭圆。
假设惯性导航系统(INS)的定位误差服从标准正态分布, σ x 2 \sigma^2_x σx2、 σ y 2 \sigma^2_y σy2和 σ x y \sigma_{xy} σxy分别是东向位置方差、北向位置方差和位置协方差, σ ^ 0 \hat{\sigma}_0 σ^0是定位误差的标准差。误差椭圆的计算公式如下:
a = σ ^ 0 σ x 2 + σ y 2 + ( σ x 2 − σ y 2 ) 2 + 4 σ x y 2 2 a = \hat{\sigma}_0 \sqrt{\frac{\sigma^2_x + \sigma^2_y + \sqrt{(\sigma^2_x - \sigma^2_y)^2 + 4\sigma^2_{xy}}}{2}} a=σ^02σx2+σy2+(σx2−σy2)2+4σxy2
公式(1)解释
- 误差椭圆:这是一个用于表示定位误差分布的椭圆,长半轴和短半轴表示误差的范围。
- 符号说明:
- σ x 2 \sigma_x^2 σx2:东向位置方差,表示东向误差的分布范围。
- σ y 2 \sigma_y^2 σy2:北向位置方差,表示北向误差的分布范围。
- σ x y \sigma_{xy} σxy:位置协方差,表示东向和北向误差之间的相关性。
- σ ^ 0 \hat{\sigma}_0 σ^0:误差的标准差,用于缩放椭圆的大小。
- 公式计算过程
- 内部平方和: σ x 2 + σ y 2 \sigma^2_x + \sigma^2_y σx2+σy2 计算了东向和北向误差方差的总和。
- 内部平方差和协方差: ( σ x 2 − σ y 2 ) 2 + 4 σ x y 2 (\sigma^2_x - \sigma^2_y)^2 + 4\sigma^2_{xy} (σx2−σy2)2+4σxy2 这一部分结合了东西方和南北方误差的差异及它们的相关性。
- 平方根运算:对上述和的结果开平方,得到一个包含协方差信息的调整值。
- 长半轴计算:最终,将计算结果乘以 σ ^ 0 \hat{\sigma}_0 σ^0 的平方根,得到误差椭圆的长半轴 a a a,即椭圆最大方向的误差范围。
- 公式意义
- 文中的公式 (1) 用于计算误差椭圆的长半轴 a a a。
- 最终用于确定误差椭圆的形状和方向,以便更精确地估计INS的定位误差范围。
b = σ ^ 0 σ x 2 + σ y 2 − ( σ x 2 − σ y 2 ) 2 + 4 σ x y 2 2 b = \hat{\sigma}_0 \sqrt{\frac{\sigma^2_x + \sigma^2_y - \sqrt{(\sigma^2_x - \sigma^2_y)^2 + 4\sigma^2_{xy}}}{2}} b=σ^02σx2+σy2−(σx2−σy2)2+4σxy2
公式(2)解释
-
误差椭圆:误差椭圆的短半轴 b b b 表示在定位误差椭圆中与长半轴垂直的方向误差范围。该半轴用于衡量误差在另一主方向上的分布。
-
符号说明:
- σ x 2 \sigma_x^2 σx2:东向位置方差,表示东向误差的分布范围。
- σ y 2 \sigma_y^2 σy2:北向位置方差,表示北向误差的分布范围。
- σ x y \sigma_{xy} σxy:位置协方差,表示东向和北向误差之间的相关性。
- σ ^ 0 \hat{\sigma}_0 σ^0:定位误差的标准差,用于缩放椭圆的大小。
-
公式计算过程
- 内部平方和: σ x 2 + σ y 2 \sigma^2_x + \sigma^2_y σx2+σy2 计算东向和北向误差方差的总和。
- 内部平方差和协方差: ( σ x 2 − σ y 2 ) 2 + 4 σ x y 2 (\sigma^2_x - \sigma^2_y)^2 + 4\sigma^2_{xy} (σx2−σy2)2+4σxy2 这一部分结合了东西方向和南北方向误差的差异及它们的相关性。
- 平方根运算:对上述和的结果取平方根,得到一个包含协方差信息的调整值。
- 短半轴计算:将计算结果乘以 σ ^ 0 \hat{\sigma}_0 σ^0 的平方根,从而得到误差椭圆的短半轴 b b b,表示椭圆次主方向上的误差范围。
-
公式意义
- 文中的公式 (2) 用于计算误差椭圆的短半轴 b b b。
- 最终用于确定误差椭圆的形状和方向,以便更精确地估计INS的定位误差范围。
ϕ = π 2 − 1 2 arctan 2 σ x y σ x 2 − σ y 2 \phi = \frac{\pi}{2} - \frac{1}{2} \arctan \frac{2\sigma_{xy}}{\sigma_x^2 - \sigma_y^2} ϕ=2π−21arctanσx2−σy22σxy
公式(3)解释
-
误差椭圆方向:误差椭圆的长半轴方向与真北方向的夹角 ϕ \phi ϕ 表示误差分布的主方向。此角度用于确定误差椭圆在地理坐标系中的方向。
-
符号说明:
- σ x 2 \sigma_x^2 σx2:东向位置方差,表示东向误差的分布范围。
- σ y 2 \sigma_y^2 σy2:北向位置方差,表示北向误差的分布范围。
- σ x y \sigma_{xy} σxy:位置协方差,表示东向和北向误差之间的相关性。
-
公式计算过程
- 协方差比值: 2 σ x y σ x 2 − σ y 2 \frac{2\sigma_{xy}}{\sigma_x^2 - \sigma_y^2} σ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 882
882

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









