






 本文详细介绍了如何绑定两台主机,包括查看和记录IP及主机名,编辑hosts文件,重启网络服务。接着,安装chrony和openssh-server,并验证SSH服务。最后,设置了ROS环境变量,进行了turtlesim的多机器人通信测试,展示了ROS在多机器人系统中的应用。
本文详细介绍了如何绑定两台主机,包括查看和记录IP及主机名,编辑hosts文件,重启网络服务。接着,安装chrony和openssh-server,并验证SSH服务。最后,设置了ROS环境变量,进行了turtlesim的多机器人通信测试,展示了ROS在多机器人系统中的应用。
记录绑定两台主机
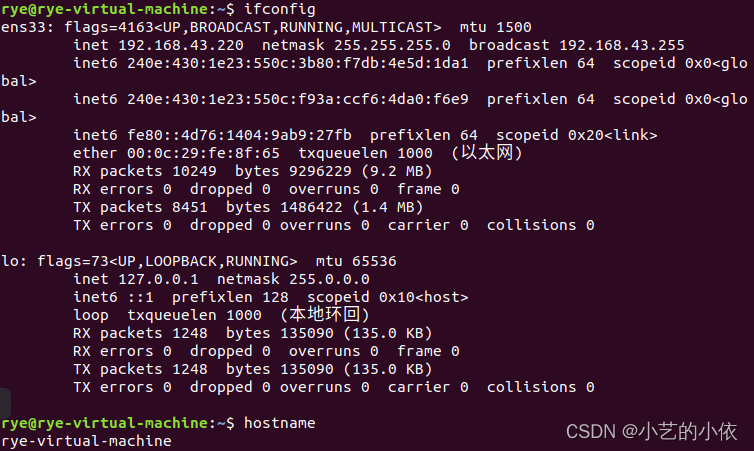
打开终端,输入命令查看主机的ip和主机名称,并记录(此处若ifconfig找不到命令,可以根据提示输入sudo apt install net-tools)
ifconfig
hostname
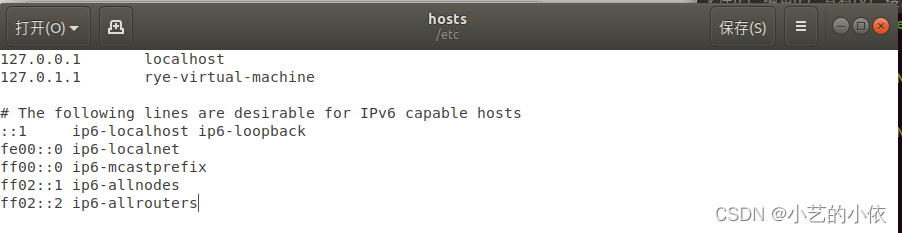
两台主机分别添加对方的ip地址和主机名到hosts文件中。这里可以直接使用vim或者sudo gedit打开文件(这里个人推荐使用gedit)
vim /ect/hosts
sudo gedit /etc/hosts
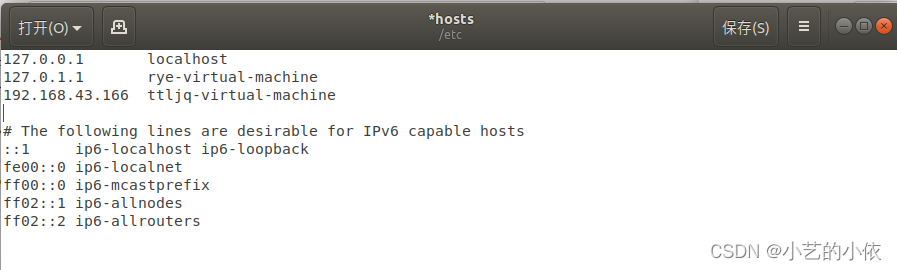
在第三行加入ip主机地址和主机名hostname然后保存退出
接下来重启网络
sudo /etc/init.d/networking restart
下载两个包
下载同步包和ssh服务器
sudo apt-get install chrony
sudo apt-get install openssh-server
检查启动
ps -e|grep ssh
ping 192.168.43.166

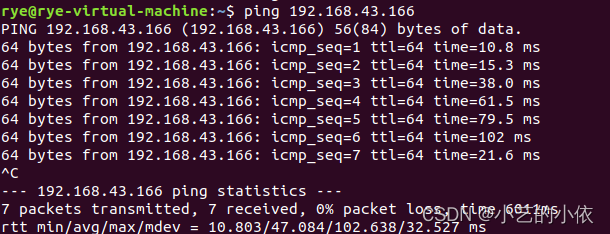
成功
配置主机
export ROS_HOSTNAME=rye-virtual-machine
export ROS_MASTER_URI=http://rye-virtual-machine:11311
多机器人通信测试
重启一下终端,然后老规矩,多开几个终端
roscore
rosrun turtlesim turtlesim_nod
从机输入以下
rostopic list
rosrun turtlesim turtle_teleop_key
效果
成!再见~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









