






话不多说直接贴代码,yolov10和v8差不多,主要参考这篇博客yolo v8实现添加mAP75与mAP90_yolo ap75-优快云博客,然后补充修正了每个类别也能显示出map75,而不是只有全部的map75。
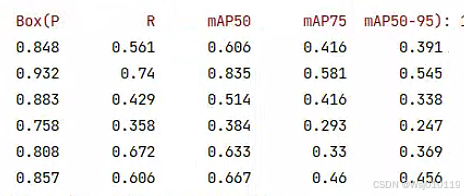
效果图如下:
修改yolov10/ultralytics/models/yolo/detect/val.py代码:
# Ultralytics YOLO , AGPL-3.0 license
import os
from pathlib import Path
import numpy as np
import torch
from ultralytics.data import build_dataloader, build_yolo_dataset, converter
from ultralytics.engine.validator import BaseValidator
from ultralytics.utils import LOGGER, ops
from ultralytics.utils.checks import check_requirements
from ultralytics.utils.metrics import ConfusionMatrix, DetMetrics, box_iou
from ultralytics.utils.plotting import output_to_target, plot_images
class DetectionValidator(BaseValidator):
"""
A class extending the BaseValidator class for validation based on a detection model.
Example:
```python
from ultralytics.models.yolo.detect import DetectionValidator
args = dict(model='yolov8n.pt', data='coco8.yaml')
validator = DetectionValidator(args=args)
validator()
```
"""
def __init__(self, dataloader=None, save_dir=None, pbar=None, args=None, _callbacks=None):
"""Initialize detection model with necessary variables and settings."""
super().__init__(dataloader, save_dir, pbar, args, _callbacks)
self.nt_per_class = None
self.is_coco = False
self.class_map = None
self.args.task = "detect"
self.metrics = DetMetrics(save_dir=self.save_dir, on_plot=self.on_plot)
self.iouv = torch.linspace(0.5, 0.95, 10) # IoU vector for mAP@0.5:0.95
self.niou = self.iouv.numel()
self.lb = [] # for autolabelling
def preprocess(self, batch):
"""Preprocesses batch of images for YOLO training."""
batch["img"] = batch["img"].to(self.device, non_blocking=True)
batch["img"] = (batch["img"].half() if self.args.half else batch["img"].float()) / 255
for k in ["batch_idx", "cls", "bboxes"]:
batch[k] = batch[k].to(self.device)
if self.args.save_hybrid:
height, width = batch["img"].shape[2:]
nb = len(batch["img"])
bboxes = batch["bboxes"] * torch.tensor((width, height, width, height), device=self.device)
self.lb = (
[
torch.cat([batch["cls"][batch["batch_idx"] == i], bboxes[batch["batch_idx"] == i]], dim=-1)
for i in range(nb)
]
if self.args.save_hybrid
else []
) # for autolabelling
return batch
def init_metrics(self, model):
"""Initialize evaluation metrics for YOLO."""
val = self.data.get(self.args.split, "") # validation path
self.is_coco = isinstance(val, str) and "coco" in val and val.endswith(f"{os.sep}val2017.txt") # is COCO
self.class_map = converter.coco80_to_coco91_class() if self.is_coco else list(range(1000))
self.args.save_json |= self.is_coco # run on final val if training COCO
self.names = model.names
self.nc = len(model.names)
self.metrics.names = self.names
self.metrics.plot = self.args.plots
self.confusion_matrix = ConfusionMatrix(nc=self.nc, conf=self.args.conf)
self.seen = 0
self.jdict = []
self.stats = dict(tp=[], conf=[], pred_cls=[], target_cls=[])
# def get_desc(self):
# """Return a formatted string summarizing class metrics of YOLO model."""
# return ("%22s" + "%11s" * 6) % ("Class", "Images", "Instances", "Box(P", "R", "mAP50", "mAP50-95)")
def get_desc(self):
"""Return a formatted string summarizing class metrics of YOLO model."""
# 为了生成一个表格标题行,用于描述YOLO模型在每个类别上的性能指标,
# 包括图像数量、实例数量、Precision、Recall、mAP50(在50% IoU 阈值下的平均精度)、
# mAP50-95(在50%-95% IoU 阈值范围内的平均精度)等。
# 生成的字符串将用于美观地显示这些指标的表格标题。
# return ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'Box(P', 'R', 'mAP50', 'mAP50-95)')
return ('%22s' + '%11s' * 7) % ('Class', 'Images', 'Instances', 'Box(P', 'R', 'mAP50', 'mAP75', 'mAP50-95)')
def postprocess(self, preds):
"""Apply Non-maximum suppression to prediction outputs."""
return ops.non_max_suppression(
preds,
self.args.conf,
self.args.iou,
labels=self.lb,
multi_label=True,
agnostic=self.args.single_cls,
max_det=self.args.max_det,
)
def _prepare_batch(self, si, batch):
"""Prepares a batch of images and annotations for validation."""
idx = batch["batch_idx"] == si
cls = batch["cls"][idx].squeeze(-1)
bbox = batch["bboxes"][idx]
ori_shape = batch["ori_shape"][si]
imgsz = batch["img"].shape[2:]
ratio_pad = batch["ratio_pad"][si]
if len(cls):
bbox = ops.xywh2xyxy(bbox) * torch.tensor(imgsz, device=self.device)[[1, 0, 1, 0]] # target boxes
ops.scale_boxes(imgsz, bbox, ori_shape, ratio_pad=ratio_pad) # native-space labels
return dict(cls=cls, bbox=bbox, ori_shape=ori_shape, imgsz=imgsz, ratio_pad=ratio_pad)
def _prepare_pred(self, pred, pbatch):
"""Prepares a batch of images and annotations for validation."""
predn = pred.clone()
ops.scale_boxes(
pbatch["imgsz"], predn[:, :4], pbatch["ori_shape"], ratio_pad=pbatch["ratio_pad"]
) # native-space pred
return predn
def update_metrics(self, preds, batch):
"""Metrics."""
for si, pred in enumerate(preds):
self.seen += 1
npr = len(pred)
stat = dict(
conf=torch.zeros(0, device=self.device),
pred_cls=torch.zeros(0, device=self.device),
tp=torch.zeros(npr, self.niou, dtype=torch.bool, device=self.device),
)
pbatch = self._prepare_batch(si, batch)
cls, bbox = pbatch.pop("cls"), pbatch.pop("bbox")
nl = len(cls)
stat["target_cls"] = cls
if npr == 0:
if nl:
for k in self.stats.keys():
self.stats[k].append(stat[k])
if self.args.plots:
self.confusion_matrix.process_batch(detections=None, gt_bboxes=bbox, gt_cls=cls)
continue
# Predictions
if self.args.single_cls:
pred[:, 5] = 0
predn = self._prepare_pred(pred, pbatch)
stat["conf"] = predn[:, 4]
stat["pred_cls"] = predn[:, 5]
# Evaluate
if nl:
stat["tp"] = self._process_batch(predn, bbox, cls)
if self.args.plots:
self.confusion_matrix.process_batch(predn, bbox, cls)
for k in self.stats.keys():
self.stats[k].append(stat[k])
# Save
if self.args.save_json:
self.pred_to_json(predn, batch["im_file"][si])
if self.args.save_txt:
file = self.save_dir / "labels" / f'{Path(batch["im_file"][si]).stem}.txt'
self.save_one_txt(predn, self.args.save_conf, pbatch["ori_shape"], file)
def finalize_metrics(self, *args, **kwargs):
"""Set final values for metrics speed and confusion matrix."""
self.metrics.speed = self.speed
self.metrics.confusion_matrix = self.confusion_matrix
def get_stats(self):
"""Returns metrics statistics and results dictionary."""
stats = {k: torch.cat(v, 0).cpu().numpy() for k, v in self.stats.items()} # to numpy
if len(stats) and stats["tp"].any():
self.metrics.process(**stats)
self.nt_per_class = np.bincount(
stats["target_cls"].astype(int), minlength=self.nc
) # number of targets per class
return self.metrics.results_dict
def print_results(self):
"""Prints training/validation set metrics per class."""
pf = "%22s" + "%11i" * 2 + "%11.3g" * len(self.metrics.keys) # print format
LOGGER.info(pf % ("all", self.seen, self.nt_per_class.sum(), *self.metrics.mean_results()))
if self.nt_per_class.sum() == 0:
LOGGER.warning(f"WARNING ⚠️ no labels found in {self.args.task} set, can not compute metrics without labels")
# Print results per class
if self.args.verbose and not self.training and self.nc > 1 and len(self.stats):
for i, c in enumerate(self.metrics.ap_class_index):
LOGGER.info(pf % (self.names[c], self.seen, self.nt_per_class[c], *self.metrics.class_result(i)))
if self.args.plots:
for normalize in True, False:
self.confusion_matrix.plot(
save_dir=self.save_dir, names=self.names.values(), normalize=normalize, on_plot=self.on_plot
)
def _process_batch(self, detections, gt_bboxes, gt_cls):
"""
Return correct prediction matrix.
Args:
detections (torch.Tensor): Tensor of shape [N, 6] representing detections.
Each detection is of the format: x1, y1, x2, y2, conf, class.
labels (torch.Tensor): Tensor of shape [M, 5] representing labels.
Each label is of the format: class, x1, y1, x2, y2.
Returns:
(torch.Tensor): Correct prediction matrix of shape [N, 10] for 10 IoU levels.
"""
iou = box_iou(gt_bboxes, detections[:, :4])
return self.match_predictions(detections[:, 5], gt_cls, iou)
def build_dataset(self, img_path, mode="val", batch=None):
"""
Build YOLO Dataset.
Args:
img_path (str): Path to the folder containing images.
mode (str): `train` mode or `val` mode, users are able to customize different augmentations for each mode.
batch (int, optional): Size of batches, this is for `rect`. Defaults to None.
"""
return build_yolo_dataset(self.args, img_path, batch, self.data, mode=mode, stride=self.stride)
def get_dataloader(self, dataset_path, batch_size):
"""Construct and return dataloader."""
dataset = self.build_dataset(dataset_path, batch=batch_size, mode="val")
return build_dataloader(dataset, batch_size, self.args.workers, shuffle=False, rank=-1) # return dataloader
def plot_val_samples(self, batch, ni):
"""Plot validation image samples."""
plot_images(
batch["img"],
batch["batch_idx"],
batch["cls"].squeeze(-1),
batch["bboxes"],
paths=batch["im_file"],
fname=self.save_dir / f"val_batch{ni}_labels.jpg",
names=self.names,
on_plot=self.on_plot,
)
def plot_predictions(self, batch, preds, ni):
"""Plots predicted bounding boxes on input images and saves the result."""
plot_images(
batch["img"],
*output_to_target(preds, max_det=self.args.max_det),
paths=batch["im_file"],
fname=self.save_dir / f"val_batch{ni}_pred.jpg",
names=self.names,
on_plot=self.on_plot,
) # pred
def save_one_txt(self, predn, save_conf, shape, file):
"""Save YOLO detections to a txt file in normalized coordinates in a specific format."""
gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
for *xyxy, conf, cls in predn.tolist():
xywh = (ops.xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
with open(file, "a") as f:
f.write(("%g " * len(line)).rstrip() % line + "\n")
def pred_to_json(self, predn, filename):
"""Serialize YOLO predictions to COCO json format."""
stem = Path(filename).stem
image_id = int(stem) if stem.isnumeric() else stem
box = ops.xyxy2xywh(predn[:, :4]) # xywh
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
for p, b in zip(predn.tolist(), box.tolist()):
self.jdict.append(
{
"image_id": image_id,
"category_id": self.class_map[int(p[5])],
"bbox": [round(x, 3) for x in b],
"score": round(p[4], 5),
}
)
# def eval_json(self, stats):
# """Evaluates YOLO output in JSON format and returns performance statistics."""
# if self.args.save_json and self.is_coco and len(self.jdict):
# anno_json = self.data["path"] / "annotations/instances_val2017.json" # annotations
# pred_json = self.save_dir / "predictions.json" # predictions
# LOGGER.info(f"\nEvaluating pycocotools mAP using {pred_json} and {anno_json}...")
# try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
# check_requirements("pycocotools>=2.0.6")
# from pycocotools.coco import COCO # noqa
# from pycocotools.cocoeval import COCOeval # noqa
#
# for x in anno_json, pred_json:
# assert x.is_file(), f"{x} file not found"
# anno = COCO(str(anno_json)) # init annotations api
# pred = anno.loadRes(str(pred_json)) # init predictions api (must pass string, not Path)
# eval = COCOeval(anno, pred, "bbox")
# if self.is_coco:
# eval.params.imgIds = [int(Path(x).stem) for x in self.dataloader.dataset.im_files] # images to eval
# eval.evaluate()
# eval.accumulate()
# eval.summarize()
# stats[self.metrics.keys[-1]], stats[self.metrics.keys[-2]], stats[self.metrics.keys[-3]] = eval.stats[:2] # update mAP50-95 and mAP50
# except Exception as e:
# LOGGER.warning(f"pycocotools unable to run: {e}")
# return stats
def eval_json(self, stats):
"""Evaluates YOLO output in JSON format and returns performance statistics."""
if self.args.save_json and self.is_coco and len(self.jdict):
anno_json = self.data['path'] / 'annotations/instances_val2017.json' # annotations
pred_json = self.save_dir / 'predictions.json' # predictions
LOGGER.info(f'\nEvaluating pycocotools mAP using {pred_json} and {anno_json}...')
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
check_requirements('pycocotools>=2.0.6')
from pycocotools.coco import COCO # noqa
from pycocotools.cocoeval import COCOeval # noqa
for x in anno_json, pred_json:
assert x.is_file(), f'{x} file not found'
anno = COCO(str(anno_json)) # init annotations api
pred = anno.loadRes(str(pred_json)) # init predictions api (must pass string, not Path)
eval = COCOeval(anno, pred, 'bbox')
if self.is_coco:
eval.params.imgIds = [int(Path(x).stem) for x in self.dataloader.dataset.im_files] # images to eval
eval.evaluate()
eval.accumulate()
eval.summarize()
# -1: mAP50-95; -2:mAP75; -3: mAP50
stats[self.metrics.keys[-1]], stats[self.metrics.keys[-2]], stats[self.metrics.keys[-3]] = eval.stats[:2] # update mAP50-95 and mAP50
except Exception as e:
LOGGER.warning(f'pycocotools unable to run: {e}')
return stats
修改yolov10/ultralytics/utils/metrics.py代码为:
# Ultralytics YOLO , AGPL-3.0 license
"""Model validation metrics."""
import math
import warnings
from pathlib import Path
import matplotlib.pyplot as plt
import numpy as np
import torch
from ultralytics.utils import LOGGER, SimpleClass, TryExcept, plt_settings
OKS_SIGMA = (
np.array([0.26, 0.25, 0.25, 0.35, 0.35, 0.79, 0.79, 0.72, 0.72, 0.62, 0.62, 1.07, 1.07, 0.87, 0.87, 0.89, 0.89])
/ 10.0
)
def bbox_ioa(box1, box2, iou=False, eps=1e-7):
"""
Calculate the intersection over box2 area given box1 and box2. Boxes are in x1y1x2y2 format.
Args:
box1 (np.ndarray): A numpy array of shape (n, 4) representing n bounding boxes.
box2 (np.ndarray): A numpy array of shape (m, 4) representing m bounding boxes.
iou (bool): Calculate the standard IoU if True else return inter_area/box2_area.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(np.ndarray): A numpy array of shape (n, m) representing the intersection over box2 area.
"""
# Get the coordinates of bounding boxes
b1_x1, b1_y1, b1_x2, b1_y2 = box1.T
b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
# Intersection area
inter_area = (np.minimum(b1_x2[:, None], b2_x2) - np.maximum(b1_x1[:, None], b2_x1)).clip(0) * (
np.minimum(b1_y2[:, None], b2_y2) - np.maximum(b1_y1[:, None], b2_y1)
).clip(0)
# Box2 area
area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1)
if iou:
box1_area = (b1_x2 - b1_x1) * (b1_y2 - b1_y1)
area = area + box1_area[:, None] - inter_area
# Intersection over box2 area
return inter_area / (area + eps)
def box_iou(box1, box2, eps=1e-7):
"""
Calculate intersection-over-union (IoU) of boxes. Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Based on https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
Args:
box1 (torch.Tensor): A tensor of shape (N, 4) representing N bounding boxes.
box2 (torch.Tensor): A tensor of shape (M, 4) representing M bounding boxes.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): An NxM tensor containing the pairwise IoU values for every element in box1 and box2.
"""
# NOTE: need float32 to get accurate iou values
box1 = torch.as_tensor(box1, dtype=torch.float32)
box2 = torch.as_tensor(box2, dtype=torch.float32)
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
(a1, a2), (b1, b2) = box1.unsqueeze(1).chunk(2, 2), box2.unsqueeze(0).chunk(2, 2)
inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp_(0).prod(2)
# IoU = inter / (area1 + area2 - inter)
return inter / ((a2 - a1).prod(2) + (b2 - b1).prod(2) - inter + eps)
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
"""
Calculate Intersection over Union (IoU) of box1(1, 4) to box2(n, 4).
Args:
box1 (torch.Tensor): A tensor representing a single bounding box with shape (1, 4).
box2 (torch.Tensor): A tensor representing n bounding boxes with shape (n, 4).
xywh (bool, optional): If True, input boxes are in (x, y, w, h) format. If False, input boxes are in
(x1, y1, x2, y2) format. Defaults to True.
GIoU (bool, optional): If True, calculate Generalized IoU. Defaults to False.
DIoU (bool, optional): If True, calculate Distance IoU. Defaults to False.
CIoU (bool, optional): If True, calculate Complete IoU. Defaults to False.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): IoU, GIoU, DIoU, or CIoU values depending on the specified flags.
"""
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * (
b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)
).clamp_(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
# IoU
iou = inter / union
if CIoU or DIoU or GIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw.pow(2) + ch.pow(2) + eps # convex diagonal squared
rho2 = (
(b2_x1 + b2_x2 - b1_x1 - b1_x2).pow(2) + (b2_y1 + b2_y2 - b1_y1 - b1_y2).pow(2)
) / 4 # center dist**2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi**2) * ((w2 / h2).atan() - (w1 / h1).atan()).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
def mask_iou(mask1, mask2, eps=1e-7):
"""
Calculate masks IoU.
Args:
mask1 (torch.Tensor): A tensor of shape (N, n) where N is the number of ground truth objects and n is the
product of image width and height.
mask2 (torch.Tensor): A tensor of shape (M, n) where M is the number of predicted objects and n is the
product of image width and height.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): A tensor of shape (N, M) representing masks IoU.
"""
intersection = torch.matmul(mask1, mask2.T).clamp_(0)
union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
return intersection / (union + eps)
def kpt_iou(kpt1, kpt2, area, sigma, eps=1e-7):
"""
Calculate Object Keypoint Similarity (OKS).
Args:
kpt1 (torch.Tensor): A tensor of shape (N, 17, 3) representing ground truth keypoints.
kpt2 (torch.Tensor): A tensor of shape (M, 17, 3) representing predicted keypoints.
area (torch.Tensor): A tensor of shape (N,) representing areas from ground truth.
sigma (list): A list containing 17 values representing keypoint scales.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): A tensor of shape (N, M) representing keypoint similarities.
"""
d = (kpt1[:, None, :, 0] - kpt2[..., 0]).pow(2) + (kpt1[:, None, :, 1] - kpt2[..., 1]).pow(2) # (N, M, 17)
sigma = torch.tensor(sigma, device=kpt1.device, dtype=kpt1.dtype) # (17, )
kpt_mask = kpt1[..., 2] != 0 # (N, 17)
e = d / (2 * sigma).pow(2) / (area[:, None, None] + eps) / 2 # from cocoeval
# e = d / ((area[None, :, None] + eps) * sigma) ** 2 / 2 # from formula
return ((-e).exp() * kpt_mask[:, None]).sum(-1) / (kpt_mask.sum(-1)[:, None] + eps)
def _get_covariance_matrix(boxes):
"""
Generating covariance matrix from obbs.
Args:
boxes (torch.Tensor): A tensor of shape (N, 5) representing rotated bounding boxes, with xywhr format.
Returns:
(torch.Tensor): Covariance metrixs corresponding to original rotated bounding boxes.
"""
# Gaussian bounding boxes, ignore the center points (the first two columns) because they are not needed here.
gbbs = torch.cat((boxes[:, 2:4].pow(2) / 12, boxes[:, 4:]), dim=-1)
a, b, c = gbbs.split(1, dim=-1)
cos = c.cos()
sin = c.sin()
cos2 = cos.pow(2)
sin2 = sin.pow(2)
return a * cos2 + b * sin2, a * sin2 + b * cos2, (a - b) * cos * sin
def probiou(obb1, obb2, CIoU=False, eps=1e-7):
"""
Calculate the prob IoU between oriented bounding boxes, https://arxiv.org/pdf/2106.06072v1.pdf.
Args:
obb1 (torch.Tensor): A tensor of shape (N, 5) representing ground truth obbs, with xywhr format.
obb2 (torch.Tensor): A tensor of shape (N, 5) representing predicted obbs, with xywhr format.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): A tensor of shape (N, ) representing obb similarities.
"""
x1, y1 = obb1[..., :2].split(1, dim=-1)
x2, y2 = obb2[..., :2].split(1, dim=-1)
a1, b1, c1 = _get_covariance_matrix(obb1)
a2, b2, c2 = _get_covariance_matrix(obb2)
t1 = (
((a1 + a2) * (y1 - y2).pow(2) + (b1 + b2) * (x1 - x2).pow(2)) / ((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2) + eps)
) * 0.25
t2 = (((c1 + c2) * (x2 - x1) * (y1 - y2)) / ((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2) + eps)) * 0.5
t3 = (
((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2))
/ (4 * ((a1 * b1 - c1.pow(2)).clamp_(0) * (a2 * b2 - c2.pow(2)).clamp_(0)).sqrt() + eps)
+ eps
).log() * 0.5
bd = (t1 + t2 + t3).clamp(eps, 100.0)
hd = (1.0 - (-bd).exp() + eps).sqrt()
iou = 1 - hd
if CIoU: # only include the wh aspect ratio part
w1, h1 = obb1[..., 2:4].split(1, dim=-1)
w2, h2 = obb2[..., 2:4].split(1, dim=-1)
v = (4 / math.pi**2) * ((w2 / h2).atan() - (w1 / h1).atan()).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - v * alpha # CIoU
return iou
def batch_probiou(obb1, obb2, eps=1e-7):
"""
Calculate the prob IoU between oriented bounding boxes, https://arxiv.org/pdf/2106.06072v1.pdf.
Args:
obb1 (torch.Tensor | np.ndarray): A tensor of shape (N, 5) representing ground truth obbs, with xywhr format.
obb2 (torch.Tensor | np.ndarray): A tensor of shape (M, 5) representing predicted obbs, with xywhr format.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): A tensor of shape (N, M) representing obb similarities.
"""
obb1 = torch.from_numpy(obb1) if isinstance(obb1, np.ndarray) else obb1
obb2 = torch.from_numpy(obb2) if isinstance(obb2, np.ndarray) else obb2
x1, y1 = obb1[..., :2].split(1, dim=-1)
x2, y2 = (x.squeeze(-1)[None] for x in obb2[..., :2].split(1, dim=-1))
a1, b1, c1 = _get_covariance_matrix(obb1)
a2, b2, c2 = (x.squeeze(-1)[None] for x in _get_covariance_matrix(obb2))
t1 = (
((a1 + a2) * (y1 - y2).pow(2) + (b1 + b2) * (x1 - x2).pow(2)) / ((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2) + eps)
) * 0.25
t2 = (((c1 + c2) * (x2 - x1) * (y1 - y2)) / ((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2) + eps)) * 0.5
t3 = (
((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2))
/ (4 * ((a1 * b1 - c1.pow(2)).clamp_(0) * (a2 * b2 - c2.pow(2)).clamp_(0)).sqrt() + eps)
+ eps
).log() * 0.5
bd = (t1 + t2 + t3).clamp(eps, 100.0)
hd = (1.0 - (-bd).exp() + eps).sqrt()
return 1 - hd
def smooth_BCE(eps=0.1):
"""
Computes smoothed positive and negative Binary Cross-Entropy targets.
This function calculates positive and negative label smoothing BCE targets based on a given epsilon value.
For implementation details, refer to https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441.
Args:
eps (float, optional): The epsilon value for label smoothing. Defaults to 0.1.
Returns:
(tuple): A tuple containing the positive and negative label smoothing BCE targets.
"""
return 1.0 - 0.5 * eps, 0.5 * eps
class ConfusionMatrix:
"""
A class for calculating and updating a confusion matrix for object detection and classification tasks.
Attributes:
task (str): The type of task, either 'detect' or 'classify'.
matrix (np.ndarray): The confusion matrix, with dimensions depending on the task.
nc (int): The number of classes.
conf (float): The confidence threshold for detections.
iou_thres (float): The Intersection over Union threshold.
"""
def __init__(self, nc, conf=0.25, iou_thres=0.45, task="detect"):
"""Initialize attributes for the YOLO model."""
self.task = task
self.matrix = np.zeros((nc + 1, nc + 1)) if self.task == "detect" else np.zeros((nc, nc))
self.nc = nc # number of classes
self.conf = 0.25 if conf in (None, 0.001) else conf # apply 0.25 if default val conf is passed
self.iou_thres = iou_thres
def process_cls_preds(self, preds, targets):
"""
Update confusion matrix for classification task.
Args:
preds (Array[N, min(nc,5)]): Predicted class labels.
targets (Array[N, 1]): Ground truth class labels.
"""
preds, targets = torch.cat(preds)[:, 0], torch.cat(targets)
for p, t in zip(preds.cpu().numpy(), targets.cpu().numpy()):
self.matrix[p][t] += 1
def process_batch(self, detections, gt_bboxes, gt_cls):
"""
Update confusion matrix for object detection task.
Args:
detections (Array[N, 6] | Array[N, 7]): Detected bounding boxes and their associated information.
Each row should contain (x1, y1, x2, y2, conf, class)
or with an additional element `angle` when it's obb.
gt_bboxes (Array[M, 4]| Array[N, 5]): Ground truth bounding boxes with xyxy/xyxyr format.
gt_cls (Array[M]): The class labels.
"""
if gt_cls.shape[0] == 0: # Check if labels is empty
if detections is not None:
detections = detections[detections[:, 4] > self.conf]
detection_classes = detections[:, 5].int()
for dc in detection_classes:
self.matrix[dc, self.nc] += 1 # false positives
return
if detections is None:
gt_classes = gt_cls.int()
for gc in gt_classes:
self.matrix[self.nc, gc] += 1 # background FN
return
detections = detections[detections[:, 4] > self.conf]
gt_classes = gt_cls.int()
detection_classes = detections[:, 5].int()
is_obb = detections.shape[1] == 7 and gt_bboxes.shape[1] == 5 # with additional `angle` dimension
iou = (
batch_probiou(gt_bboxes, torch.cat([detections[:, :4], detections[:, -1:]], dim=-1))
if is_obb
else box_iou(gt_bboxes, detections[:, :4])
)
x = torch.where(iou > self.iou_thres)
if x[0].shape[0]:
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
if x[0].shape[0] > 1:
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
else:
matches = np.zeros((0, 3))
n = matches.shape[0] > 0
m0, m1, _ = matches.transpose().astype(int)
for i, gc in enumerate(gt_classes):
j = m0 == i
if n and sum(j) == 1:
self.matrix[detection_classes[m1[j]], gc] += 1 # correct
else:
self.matrix[self.nc, gc] += 1 # true background
if n:
for i, dc in enumerate(detection_classes):
if not any(m1 == i):
self.matrix[dc, self.nc] += 1 # predicted background
def matrix(self):
"""Returns the confusion matrix."""
return self.matrix
def tp_fp(self):
"""Returns true positives and false positives."""
tp = self.matrix.diagonal() # true positives
fp = self.matrix.sum(1) - tp # false positives
# fn = self.matrix.sum(0) - tp # false negatives (missed detections)
return (tp[:-1], fp[:-1]) if self.task == "detect" else (tp, fp) # remove background class if task=detect
@TryExcept("WARNING ⚠️ ConfusionMatrix plot failure")
@plt_settings()
def plot(self, normalize=True, save_dir="", names=(), on_plot=None):
"""
Plot the confusion matrix using seaborn and save it to a file.
Args:
normalize (bool): Whether to normalize the confusion matrix.
save_dir (str): Directory where the plot will be saved.
names (tuple): Names of classes, used as labels on the plot.
on_plot (func): An optional callback to pass plots path and data when they are rendered.
"""
import seaborn as sn
array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1e-9) if normalize else 1) # normalize columns
array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
nc, nn = self.nc, len(names) # number of classes, names
sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
ticklabels = (list(names) + ["background"]) if labels else "auto"
with warnings.catch_warnings():
warnings.simplefilter("ignore") # suppress empty matrix RuntimeWarning: All-NaN slice encountered
sn.heatmap(
array,
ax=ax,
annot=nc < 30,
annot_kws={"size": 8},
cmap="Blues",
fmt=".2f" if normalize else ".0f",
square=True,
vmin=0.0,
xticklabels=ticklabels,
yticklabels=ticklabels,
).set_facecolor((1, 1, 1))
title = "Confusion Matrix" + " Normalized" * normalize
ax.set_xlabel("True")
ax.set_ylabel("Predicted")
ax.set_title(title)
plot_fname = Path(save_dir) / f'{title.lower().replace(" ", "_")}.png'
fig.savefig(plot_fname, dpi=250)
plt.close(fig)
if on_plot:
on_plot(plot_fname)
def print(self):
"""Print the confusion matrix to the console."""
for i in range(self.nc + 1):
LOGGER.info(" ".join(map(str, self.matrix[i])))
def smooth(y, f=0.05):
"""Box filter of fraction f."""
nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
p = np.ones(nf // 2) # ones padding
yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
return np.convolve(yp, np.ones(nf) / nf, mode="valid") # y-smoothed
@plt_settings()
def plot_pr_curve(px, py, ap, save_dir=Path("pr_curve.png"), names=(), on_plot=None):
"""Plots a precision-recall curve."""
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
py = np.stack(py, axis=1)
if 0 < len(names) < 21: # display per-class legend if < 21 classes
for i, y in enumerate(py.T):
ax.plot(px, y, linewidth=1, label=f"{names[i]} {ap[i, 0]:.3f}") # plot(recall, precision)
else:
ax.plot(px, py, linewidth=1, color="grey") # plot(recall, precision)
ax.plot(px, py.mean(1), linewidth=3, color="blue", label="all classes %.3f mAP@0.5" % ap[:, 0].mean())
ax.set_xlabel("Recall")
ax.set_ylabel("Precision")
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
ax.set_title("Precision-Recall Curve")
fig.savefig(save_dir, dpi=250)
plt.close(fig)
if on_plot:
on_plot(save_dir)
@plt_settings()
def plot_mc_curve(px, py, save_dir=Path("mc_curve.png"), names=(), xlabel="Confidence", ylabel="Metric", on_plot=None):
"""Plots a metric-confidence curve."""
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
if 0 < len(names) < 21: # display per-class legend if < 21 classes
for i, y in enumerate(py):
ax.plot(px, y, linewidth=1, label=f"{names[i]}") # plot(confidence, metric)
else:
ax.plot(px, py.T, linewidth=1, color="grey") # plot(confidence, metric)
y = smooth(py.mean(0), 0.05)
ax.plot(px, y, linewidth=3, color="blue", label=f"all classes {y.max():.2f} at {px[y.argmax()]:.3f}")
ax.set_xlabel(xlabel)
ax.set_ylabel(ylabel)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
ax.set_title(f"{ylabel}-Confidence Curve")
fig.savefig(save_dir, dpi=250)
plt.close(fig)
if on_plot:
on_plot(save_dir)
def compute_ap(recall, precision):
"""
Compute the average precision (AP) given the recall and precision curves.
Args:
recall (list): The recall curve.
precision (list): The precision curve.
Returns:
(float): Average precision.
(np.ndarray): Precision envelope curve.
(np.ndarray): Modified recall curve with sentinel values added at the beginning and end.
"""
# Append sentinel values to beginning and end
mrec = np.concatenate(([0.0], recall, [1.0]))
mpre = np.concatenate(([1.0], precision, [0.0]))
# Compute the precision envelope
mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
# Integrate area under curve
method = "interp" # methods: 'continuous', 'interp'
if method == "interp":
x = np.linspace(0, 1, 101) # 101-point interp (COCO)
ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
else: # 'continuous'
i = np.where(mrec[1:] != mrec[:-1])[0] # points where x-axis (recall) changes
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
return ap, mpre, mrec
def ap_per_class(
tp, conf, pred_cls, target_cls, plot=False, on_plot=None, save_dir=Path(), names=(), eps=1e-16, prefix=""
):
"""
Computes the average precision per class for object detection evaluation.
Args:
tp (np.ndarray): Binary array indicating whether the detection is correct (True) or not (False).
conf (np.ndarray): Array of confidence scores of the detections.
pred_cls (np.ndarray): Array of predicted classes of the detections.
target_cls (np.ndarray): Array of true classes of the detections.
plot (bool, optional): Whether to plot PR curves or not. Defaults to False.
on_plot (func, optional): A callback to pass plots path and data when they are rendered. Defaults to None.
save_dir (Path, optional): Directory to save the PR curves. Defaults to an empty path.
names (tuple, optional): Tuple of class names to plot PR curves. Defaults to an empty tuple.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-16.
prefix (str, optional): A prefix string for saving the plot files. Defaults to an empty string.
Returns:
(tuple): A tuple of six arrays and one array of unique classes, where:
tp (np.ndarray): True positive counts at threshold given by max F1 metric for each class.Shape: (nc,).
fp (np.ndarray): False positive counts at threshold given by max F1 metric for each class. Shape: (nc,).
p (np.ndarray): Precision values at threshold given by max F1 metric for each class. Shape: (nc,).
r (np.ndarray): Recall values at threshold given by max F1 metric for each class. Shape: (nc,).
f1 (np.ndarray): F1-score values at threshold given by max F1 metric for each class. Shape: (nc,).
ap (np.ndarray): Average precision for each class at different IoU thresholds. Shape: (nc, 10).
unique_classes (np.ndarray): An array of unique classes that have data. Shape: (nc,).
p_curve (np.ndarray): Precision curves for each class. Shape: (nc, 1000).
r_curve (np.ndarray): Recall curves for each class. Shape: (nc, 1000).
f1_curve (np.ndarray): F1-score curves for each class. Shape: (nc, 1000).
x (np.ndarray): X-axis values for the curves. Shape: (1000,).
prec_values: Precision values at mAP@0.5 for each class. Shape: (nc, 1000).
"""
# Sort by objectness
i = np.argsort(-conf)
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
# Find unique classes
unique_classes, nt = np.unique(target_cls, return_counts=True)
nc = unique_classes.shape[0] # number of classes, number of detections
# Create Precision-Recall curve and compute AP for each class
x, prec_values = np.linspace(0, 1, 1000), []
# Average precision, precision and recall curves
ap, p_curve, r_curve = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
for ci, c in enumerate(unique_classes):
i = pred_cls == c
n_l = nt[ci] # number of labels
n_p = i.sum() # number of predictions
if n_p == 0 or n_l == 0:
continue
# Accumulate FPs and TPs
fpc = (1 - tp[i]).cumsum(0)
tpc = tp[i].cumsum(0)
# Recall
recall = tpc / (n_l + eps) # recall curve
r_curve[ci] = np.interp(-x, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
# Precision
precision = tpc / (tpc + fpc) # precision curve
p_curve[ci] = np.interp(-x, -conf[i], precision[:, 0], left=1) # p at pr_score
# AP from recall-precision curve
for j in range(tp.shape[1]):
ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
if plot and j == 0:
prec_values.append(np.interp(x, mrec, mpre)) # precision at mAP@0.5
prec_values = np.array(prec_values) # (nc, 1000)
# Compute F1 (harmonic mean of precision and recall)
f1_curve = 2 * p_curve * r_curve / (p_curve + r_curve + eps)
names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
names = dict(enumerate(names)) # to dict
if plot:
plot_pr_curve(x, prec_values, ap, save_dir / f"{prefix}PR_curve.png", names, on_plot=on_plot)
plot_mc_curve(x, f1_curve, save_dir / f"{prefix}F1_curve.png", names, ylabel="F1", on_plot=on_plot)
plot_mc_curve(x, p_curve, save_dir / f"{prefix}P_curve.png", names, ylabel="Precision", on_plot=on_plot)
plot_mc_curve(x, r_curve, save_dir / f"{prefix}R_curve.png", names, ylabel="Recall", on_plot=on_plot)
i = smooth(f1_curve.mean(0), 0.1).argmax() # max F1 index
p, r, f1 = p_curve[:, i], r_curve[:, i], f1_curve[:, i] # max-F1 precision, recall, F1 values
tp = (r * nt).round() # true positives
fp = (tp / (p + eps) - tp).round() # false positives
return tp, fp, p, r, f1, ap, unique_classes.astype(int), p_curve, r_curve, f1_curve, x, prec_values
class Metric(SimpleClass):
"""
Class for computing evaluation metrics for YOLOv8 model.
Attributes:
p (list): Precision for each class. Shape: (nc,).
r (list): Recall for each class. Shape: (nc,).
f1 (list): F1 score for each class. Shape: (nc,).
all_ap (list): AP scores for all classes and all IoU thresholds. Shape: (nc, 10).
ap_class_index (list): Index of class for each AP score. Shape: (nc,).
nc (int): Number of classes.
Methods:
ap50(): AP at IoU threshold of 0.5 for all classes. Returns: List of AP scores. Shape: (nc,) or [].
ap(): AP at IoU thresholds from 0.5 to 0.95 for all classes. Returns: List of AP scores. Shape: (nc,) or [].
mp(): Mean precision of all classes. Returns: Float.
mr(): Mean recall of all classes. Returns: Float.
map50(): Mean AP at IoU threshold of 0.5 for all classes. Returns: Float.
map75(): Mean AP at IoU threshold of 0.75 for all classes. Returns: Float.
map(): Mean AP at IoU thresholds from 0.5 to 0.95 for all classes. Returns: Float.
mean_results(): Mean of results, returns mp, mr, map50, map.
class_result(i): Class-aware result, returns p[i], r[i], ap50[i], ap[i].
maps(): mAP of each class. Returns: Array of mAP scores, shape: (nc,).
fitness(): Model fitness as a weighted combination of metrics. Returns: Float.
update(results): Update metric attributes with new evaluation results.
"""
def __init__(self) -> None:
"""Initializes a Metric instance for computing evaluation metrics for the YOLOv8 model."""
self.p = [] # (nc, )
self.r = [] # (nc, )
self.f1 = [] # (nc, )
self.all_ap = [] # (nc, 10)
self.ap_class_index = [] # (nc, )
self.nc = 0
@property
def ap50(self):
"""
Returns the Average Precision (AP) at an IoU threshold of 0.5 for all classes.
Returns:
(np.ndarray, list): Array of shape (nc,) with AP50 values per class, or an empty list if not available.
"""
return self.all_ap[:, 0] if len(self.all_ap) else []
@property
def ap(self):
"""
Returns the Average Precision (AP) at an IoU threshold of 0.5-0.95 for all classes.
Returns:
(np.ndarray, list): Array of shape (nc,) with AP50-95 values per class, or an empty list if not available.
"""
return self.all_ap.mean(1) if len(self.all_ap) else []
@property
def ap75(self):
"""
Returns the Average Precision (AP) at an IoU threshold of 0.75 for all classes.
Returns:
(np.ndarray, list): Array of shape (nc,) with AP75 values per class, or an empty list if not available.
"""
return self.all_ap[:, 5] if len(self.all_ap) else []
@property
def ap90(self):
"""
Returns the Average Precision (AP) at an IoU threshold of 0.90 for all classes.
Returns:
(np.ndarray, list): Array of shape (nc,) with AP90 values per class, or an empty list if not available.
"""
return self.all_ap[:, 8] if len(self.all_ap) else []
@property
def mp(self):
"""
Returns the Mean Precision of all classes.
Returns:
(float): The mean precision of all classes.
"""
return self.p.mean() if len(self.p) else 0.0
@property
def mr(self):
"""
Returns the Mean Recall of all classes.
Returns:
(float): The mean recall of all classes.
"""
return self.r.mean() if len(self.r) else 0.0
@property
def map50(self):
"""
Returns the mean Average Precision (mAP) at an IoU threshold of 0.5.
Returns:
(float): The mAP at an IoU threshold of 0.5.
"""
return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
@property
def map75(self):
"""
Returns the mean Average Precision (mAP) at an IoU threshold of 0.75.
Returns:
(float): The mAP at an IoU threshold of 0.75.
"""
return self.all_ap[:, 5].mean() if len(self.all_ap) else 0.0
@property
def map(self):
"""
Returns the mean Average Precision (mAP) over IoU thresholds of 0.5 - 0.95 in steps of 0.05.
Returns:
(float): The mAP over IoU thresholds of 0.5 - 0.95 in steps of 0.05.
"""
return self.all_ap.mean() if len(self.all_ap) else 0.0
def mean_results(self):
"""Mean of results, return mp, mr, map50, map."""
return [self.mp, self.mr, self.map50, self.map75, self.map]
def class_result(self, i):
"""Class-aware result, return p[i], r[i], ap50[i], ap[i]."""
return self.p[i], self.r[i], self.ap50[i], self.ap75[i], self.ap[i]
@property
def maps(self):
"""MAP of each class."""
maps = np.zeros(self.nc) + self.map
for i, c in enumerate(self.ap_class_index):
maps[c] = self.ap[i]
return maps
# def fitness(self):
# """Model fitness as a weighted combination of metrics."""
# w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
# return (np.array(self.mean_results()) * w).sum()
def fitness(self):
"""Model fitness as a weighted combination of metrics."""
w = [0.0, 0.0, 0.1, 0.1, 0.8] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
return (np.array(self.mean_results()) * w).sum()
def update(self, results):
"""
Updates the evaluation metrics of the model with a new set of results.
Args:
results (tuple): A tuple containing the following evaluation metrics:
- p (list): Precision for each class. Shape: (nc,).
- r (list): Recall for each class. Shape: (nc,).
- f1 (list): F1 score for each class. Shape: (nc,).
- all_ap (list): AP scores for all classes and all IoU thresholds. Shape: (nc, 10).
- ap_class_index (list): Index of class for each AP score. Shape: (nc,).
Side Effects:
Updates the class attributes `self.p`, `self.r`, `self.f1`, `self.all_ap`, and `self.ap_class_index` based
on the values provided in the `results` tuple.
"""
(
self.p,
self.r,
self.f1,
self.all_ap,
self.ap_class_index,
self.p_curve,
self.r_curve,
self.f1_curve,
self.px,
self.prec_values,
) = results
@property
def curves(self):
"""Returns a list of curves for accessing specific metrics curves."""
return []
@property
def curves_results(self):
"""Returns a list of curves for accessing specific metrics curves."""
return [
[self.px, self.prec_values, "Recall", "Precision"],
[self.px, self.f1_curve, "Confidence", "F1"],
[self.px, self.p_curve, "Confidence", "Precision"],
[self.px, self.r_curve, "Confidence", "Recall"],
]
class DetMetrics(SimpleClass):
"""
This class is a utility class for computing detection metrics such as precision, recall, and mean average precision
(mAP) of an object detection model.
Args:
save_dir (Path): A path to the directory where the output plots will be saved. Defaults to current directory.
plot (bool): A flag that indicates whether to plot precision-recall curves for each class. Defaults to False.
on_plot (func): An optional callback to pass plots path and data when they are rendered. Defaults to None.
names (tuple of str): A tuple of strings that represents the names of the classes. Defaults to an empty tuple.
Attributes:
save_dir (Path): A path to the directory where the output plots will be saved.
plot (bool): A flag that indicates whether to plot the precision-recall curves for each class.
on_plot (func): An optional callback to pass plots path and data when they are rendered.
names (tuple of str): A tuple of strings that represents the names of the classes.
box (Metric): An instance of the Metric class for storing the results of the detection metrics.
speed (dict): A dictionary for storing the execution time of different parts of the detection process.
Methods:
process(tp, conf, pred_cls, target_cls): Updates the metric results with the latest batch of predictions.
keys: Returns a list of keys for accessing the computed detection metrics.
mean_results: Returns a list of mean values for the computed detection metrics.
class_result(i): Returns a list of values for the computed detection metrics for a specific class.
maps: Returns a dictionary of mean average precision (mAP) values for different IoU thresholds.
fitness: Computes the fitness score based on the computed detection metrics.
ap_class_index: Returns a list of class indices sorted by their average precision (AP) values.
results_dict: Returns a dictionary that maps detection metric keys to their computed values.
curves: TODO
curves_results: TODO
"""
def __init__(self, save_dir=Path("."), plot=False, on_plot=None, names=()) -> None:
"""Initialize a DetMetrics instance with a save directory, plot flag, callback function, and class names."""
self.save_dir = save_dir
self.plot = plot
self.on_plot = on_plot
self.names = names
self.box = Metric()
self.speed = {"preprocess": 0.0, "inference": 0.0, "loss": 0.0, "postprocess": 0.0}
self.task = "detect"
def process(self, tp, conf, pred_cls, target_cls):
"""Process predicted results for object detection and update metrics."""
results = ap_per_class(
tp,
conf,
pred_cls,
target_cls,
plot=self.plot,
save_dir=self.save_dir,
names=self.names,
on_plot=self.on_plot,
)[2:]
self.box.nc = len(self.names)
self.box.update(results)
# @property
# def keys(self):
# """Returns a list of keys for accessing specific metrics."""
# return ["metrics/precision(B)", "metrics/recall(B)", "metrics/mAP50(B)", "metrics/mAP50-95(B)"]
@property
def keys(self):
"""Returns a list of keys for accessing specific metrics."""
return ['metrics/precision(B)', 'metrics/recall(B)', 'metrics/mAP50(B)', 'metrics/mAP75(B)', 'metrics/mAP50-95(B)']
def mean_results(self):
"""Calculate mean of detected objects & return precision, recall, mAP50, and mAP50-95."""
return self.box.mean_results()
def class_result(self, i):
"""Return the result of evaluating the performance of an object detection model on a specific class."""
return self.box.class_result(i)
@property
def maps(self):
"""Returns mean Average Precision (mAP) scores per class."""
return self.box.maps
@property
def fitness(self):
"""Returns the fitness of box object."""
return self.box.fitness()
@property
def ap_class_index(self):
"""Returns the average precision index per class."""
return self.box.ap_class_index
@property
def results_dict(self):
"""Returns dictionary of computed performance metrics and statistics."""
return dict(zip(self.keys + ["fitness"], self.mean_results() + [self.fitness]))
@property
def curves(self):
"""Returns a list of curves for accessing specific metrics curves."""
return ["Precision-Recall(B)", "F1-Confidence(B)", "Precision-Confidence(B)", "Recall-Confidence(B)"]
@property
def curves_results(self):
"""Returns dictionary of computed performance metrics and statistics."""
return self.box.curves_results
class SegmentMetrics(SimpleClass):
"""
Calculates and aggregates detection and segmentation metrics over a given set of classes.
Args:
save_dir (Path): Path to the directory where the output plots should be saved. Default is the current directory.
plot (bool): Whether to save the detection and segmentation plots. Default is False.
on_plot (func): An optional callback to pass plots path and data when they are rendered. Defaults to None.
names (list): List of class names. Default is an empty list.
Attributes:
save_dir (Path): Path to the directory where the output plots should be saved.
plot (bool): Whether to save the detection and segmentation plots.
on_plot (func): An optional callback to pass plots path and data when they are rendered.
names (list): List of class names.
box (Metric): An instance of the Metric class to calculate box detection metrics.
seg (Metric): An instance of the Metric class to calculate mask segmentation metrics.
speed (dict): Dictionary to store the time taken in different phases of inference.
Methods:
process(tp_m, tp_b, conf, pred_cls, target_cls): Processes metrics over the given set of predictions.
mean_results(): Returns the mean of the detection and segmentation metrics over all the classes.
class_result(i): Returns the detection and segmentation metrics of class `i`.
maps: Returns the mean Average Precision (mAP) scores for IoU thresholds ranging from 0.50 to 0.95.
fitness: Returns the fitness scores, which are a single weighted combination of metrics.
ap_class_index: Returns the list of indices of classes used to compute Average Precision (AP).
results_dict: Returns the dictionary containing all the detection and segmentation metrics and fitness score.
"""
def __init__(self, save_dir=Path("."), plot=False, on_plot=None, names=()) -> None:
"""Initialize a SegmentMetrics instance with a save directory, plot flag, callback function, and class names."""
self.save_dir = save_dir
self.plot = plot
self.on_plot = on_plot
self.names = names
self.box = Metric()
self.seg = Metric()
self.speed = {"preprocess": 0.0, "inference": 0.0, "loss": 0.0, "postprocess": 0.0}
self.task = "segment"
def process(self, tp, tp_m, conf, pred_cls, target_cls):
"""
Processes the detection and segmentation metrics over the given set of predictions.
Args:
tp (list): List of True Positive boxes.
tp_m (list): List of True Positive masks.
conf (list): List of confidence scores.
pred_cls (list): List of predicted classes.
target_cls (list): List of target classes.
"""
results_mask = ap_per_class(
tp_m,
conf,
pred_cls,
target_cls,
plot=self.plot,
on_plot=self.on_plot,
save_dir=self.save_dir,
names=self.names,
prefix="Mask",
)[2:]
self.seg.nc = len(self.names)
self.seg.update(results_mask)
results_box = ap_per_class(
tp,
conf,
pred_cls,
target_cls,
plot=self.plot,
on_plot=self.on_plot,
save_dir=self.save_dir,
names=self.names,
prefix="Box",
)[2:]
self.box.nc = len(self.names)
self.box.update(results_box)
@property
def keys(self):
"""Returns a list of keys for accessing metrics."""
return [
'metrics/precision(B)', 'metrics/recall(B)', 'metrics/mAP50(B)', 'metrics/mAP75(B)', 'metrics/mAP50-95(B)',
'metrics/precision(M)', 'metrics/recall(M)', 'metrics/mAP50(M)', 'metrics/mAP75(M)', 'metrics/mAP50-95(M)']
# @property
# def keys(self):
# """Returns a list of keys for accessing metrics."""
# return [
# "metrics/precision(B)",
# "metrics/recall(B)",
# "metrics/mAP50(B)",
# "metrics/mAP50-95(B)",
# "metrics/precision(M)",
# "metrics/recall(M)",
# "metrics/mAP50(M)",
# "metrics/mAP50-95(M)",
# ]
def mean_results(self):
"""Return the mean metrics for bounding box and segmentation results."""
return self.box.mean_results() + self.seg.mean_results()
def class_result(self, i):
"""Returns classification results for a specified class index."""
return self.box.class_result(i) + self.seg.class_result(i)
@property
def maps(self):
"""Returns mAP scores for object detection and semantic segmentation models."""
return self.box.maps + self.seg.maps
@property
def fitness(self):
"""Get the fitness score for both segmentation and bounding box models."""
return self.seg.fitness() + self.box.fitness()
@property
def ap_class_index(self):
"""Boxes and masks have the same ap_class_index."""
return self.box.ap_class_index
@property
def results_dict(self):
"""Returns results of object detection model for evaluation."""
return dict(zip(self.keys + ["fitness"], self.mean_results() + [self.fitness]))
@property
def curves(self):
"""Returns a list of curves for accessing specific metrics curves."""
return [
"Precision-Recall(B)",
"F1-Confidence(B)",
"Precision-Confidence(B)",
"Recall-Confidence(B)",
"Precision-Recall(M)",
"F1-Confidence(M)",
"Precision-Confidence(M)",
"Recall-Confidence(M)",
]
@property
def curves_results(self):
"""Returns dictionary of computed performance metrics and statistics."""
return self.box.curves_results + self.seg.curves_results
class PoseMetrics(SegmentMetrics):
"""
Calculates and aggregates detection and pose metrics over a given set of classes.
Args:
save_dir (Path): Path to the directory where the output plots should be saved. Default is the current directory.
plot (bool): Whether to save the detection and segmentation plots. Default is False.
on_plot (func): An optional callback to pass plots path and data when they are rendered. Defaults to None.
names (list): List of class names. Default is an empty list.
Attributes:
save_dir (Path): Path to the directory where the output plots should be saved.
plot (bool): Whether to save the detection and segmentation plots.
on_plot (func): An optional callback to pass plots path and data when they are rendered.
names (list): List of class names.
box (Metric): An instance of the Metric class to calculate box detection metrics.
pose (Metric): An instance of the Metric class to calculate mask segmentation metrics.
speed (dict): Dictionary to store the time taken in different phases of inference.
Methods:
process(tp_m, tp_b, conf, pred_cls, target_cls): Processes metrics over the given set of predictions.
mean_results(): Returns the mean of the detection and segmentation metrics over all the classes.
class_result(i): Returns the detection and segmentation metrics of class `i`.
maps: Returns the mean Average Precision (mAP) scores for IoU thresholds ranging from 0.50 to 0.95.
fitness: Returns the fitness scores, which are a single weighted combination of metrics.
ap_class_index: Returns the list of indices of classes used to compute Average Precision (AP).
results_dict: Returns the dictionary containing all the detection and segmentation metrics and fitness score.
"""
def __init__(self, save_dir=Path("."), plot=False, on_plot=None, names=()) -> None:
"""Initialize the PoseMetrics class with directory path, class names, and plotting options."""
super().__init__(save_dir, plot, names)
self.save_dir = save_dir
self.plot = plot
self.on_plot = on_plot
self.names = names
self.box = Metric()
self.pose = Metric()
self.speed = {"preprocess": 0.0, "inference": 0.0, "loss": 0.0, "postprocess": 0.0}
self.task = "pose"
def process(self, tp, tp_p, conf, pred_cls, target_cls):
"""
Processes the detection and pose metrics over the given set of predictions.
Args:
tp (list): List of True Positive boxes.
tp_p (list): List of True Positive keypoints.
conf (list): List of confidence scores.
pred_cls (list): List of predicted classes.
target_cls (list): List of target classes.
"""
results_pose = ap_per_class(
tp_p,
conf,
pred_cls,
target_cls,
plot=self.plot,
on_plot=self.on_plot,
save_dir=self.save_dir,
names=self.names,
prefix="Pose",
)[2:]
self.pose.nc = len(self.names)
self.pose.update(results_pose)
results_box = ap_per_class(
tp,
conf,
pred_cls,
target_cls,
plot=self.plot,
on_plot=self.on_plot,
save_dir=self.save_dir,
names=self.names,
prefix="Box",
)[2:]
self.box.nc = len(self.names)
self.box.update(results_box)
@property
def keys(self):
"""Returns list of evaluation metric keys."""
return [
'metrics/precision(B)', 'metrics/recall(B)', 'metrics/mAP50(B)', 'metrics/mAP75(B)', 'metrics/mAP50-95(B)',
'metrics/precision(P)', 'metrics/recall(P)', 'metrics/mAP50(P)', 'metrics/mAP75(P)', 'metrics/mAP50-95(P)']
# @property
# def keys(self):
# """Returns list of evaluation metric keys."""
# return [
# "metrics/precision(B)",
# "metrics/recall(B)",
# "metrics/mAP50(B)",
# "metrics/mAP50-95(B)",
# "metrics/precision(P)",
# "metrics/recall(P)",
# "metrics/mAP50(P)",
# "metrics/mAP50-95(P)",
# ]
def mean_results(self):
"""Return the mean results of box and pose."""
return self.box.mean_results() + self.pose.mean_results()
def class_result(self, i):
"""Return the class-wise detection results for a specific class i."""
return self.box.class_result(i) + self.pose.class_result(i)
@property
def maps(self):
"""Returns the mean average precision (mAP) per class for both box and pose detections."""
return self.box.maps + self.pose.maps
@property
def fitness(self):
"""Computes classification metrics and speed using the `targets` and `pred` inputs."""
return self.pose.fitness() + self.box.fitness()
@property
def curves(self):
"""Returns a list of curves for accessing specific metrics curves."""
return [
"Precision-Recall(B)",
"F1-Confidence(B)",
"Precision-Confidence(B)",
"Recall-Confidence(B)",
"Precision-Recall(P)",
"F1-Confidence(P)",
"Precision-Confidence(P)",
"Recall-Confidence(P)",
]
@property
def curves_results(self):
"""Returns dictionary of computed performance metrics and statistics."""
return self.box.curves_results + self.pose.curves_results
class ClassifyMetrics(SimpleClass):
"""
Class for computing classification metrics including top-1 and top-5 accuracy.
Attributes:
top1 (float): The top-1 accuracy.
top5 (float): The top-5 accuracy.
speed (Dict[str, float]): A dictionary containing the time taken for each step in the pipeline.
Properties:
fitness (float): The fitness of the model, which is equal to top-5 accuracy.
results_dict (Dict[str, Union[float, str]]): A dictionary containing the classification metrics and fitness.
keys (List[str]): A list of keys for the results_dict.
Methods:
process(targets, pred): Processes the targets and predictions to compute classification metrics.
"""
def __init__(self) -> None:
"""Initialize a ClassifyMetrics instance."""
self.top1 = 0
self.top5 = 0
self.speed = {"preprocess": 0.0, "inference": 0.0, "loss": 0.0, "postprocess": 0.0}
self.task = "classify"
def process(self, targets, pred):
"""Target classes and predicted classes."""
pred, targets = torch.cat(pred), torch.cat(targets)
correct = (targets[:, None] == pred).float()
acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
self.top1, self.top5 = acc.mean(0).tolist()
@property
def fitness(self):
"""Returns mean of top-1 and top-5 accuracies as fitness score."""
return (self.top1 + self.top5) / 2
@property
def results_dict(self):
"""Returns a dictionary with model's performance metrics and fitness score."""
return dict(zip(self.keys + ["fitness"], [self.top1, self.top5, self.fitness]))
@property
def keys(self):
"""Returns a list of keys for the results_dict property."""
return ["metrics/accuracy_top1", "metrics/accuracy_top5"]
@property
def curves(self):
"""Returns a list of curves for accessing specific metrics curves."""
return []
@property
def curves_results(self):
"""Returns a list of curves for accessing specific metrics curves."""
return []
class OBBMetrics(SimpleClass):
def __init__(self, save_dir=Path("."), plot=False, on_plot=None, names=()) -> None:
self.save_dir = save_dir
self.plot = plot
self.on_plot = on_plot
self.names = names
self.box = Metric()
self.speed = {"preprocess": 0.0, "inference": 0.0, "loss": 0.0, "postprocess": 0.0}
def process(self, tp, conf, pred_cls, target_cls):
"""Process predicted results for object detection and update metrics."""
results = ap_per_class(
tp,
conf,
pred_cls,
target_cls,
plot=self.plot,
save_dir=self.save_dir,
names=self.names,
on_plot=self.on_plot,
)[2:]
self.box.nc = len(self.names)
self.box.update(results)
# @property
# def keys(self):
# """Returns a list of keys for accessing specific metrics."""
# return ["metrics/precision(B)", "metrics/recall(B)", "metrics/mAP50(B)", "metrics/mAP50-95(B)"]
@property
def keys(self):
"""Returns a list of keys for accessing specific metrics."""
return ['metrics/precision(B)', 'metrics/recall(B)', 'metrics/mAP50(B)', 'metrics/mAP75(B)', 'metrics/mAP50-95(B)']
def mean_results(self):
"""Calculate mean of detected objects & return precision, recall, mAP50, and mAP50-95."""
return self.box.mean_results()
def class_result(self, i):
"""Return the result of evaluating the performance of an object detection model on a specific class."""
return self.box.class_result(i)
@property
def maps(self):
"""Returns mean Average Precision (mAP) scores per class."""
return self.box.maps
@property
def fitness(self):
"""Returns the fitness of box object."""
return self.box.fitness()
@property
def ap_class_index(self):
"""Returns the average precision index per class."""
return self.box.ap_class_index
@property
def results_dict(self):
"""Returns dictionary of computed performance metrics and statistics."""
return dict(zip(self.keys + ["fitness"], self.mean_results() + [self.fitness]))
@property
def curves(self):
"""Returns a list of curves for accessing specific metrics curves."""
return []
@property
def curves_results(self):
"""Returns a list of curves for accessing specific metrics curves."""
return []

















 245
245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









