




内容涵盖空间数据获取方法、空间采集与组织,从空间数据的基本概念、分类到地理数据库的设计与创建。学习如何使用ArcGIS Pro和Python进行空间数据的管理,确保数据采集和组织的高效性和准确性。聚焦于空间数据的转换与处理,包括数据格式转换、数据融合和裁剪等操作。通过实际操作,掌握如何利用ArcGIS Pro和Python进行高效的数据处理,全面掌握各种空间数据类型的处理方法,为实际工作中的空间数据处理提供有力支持。
专题一 数据处理环境简介
方案一:ArcGIS Pro:使用ArcGIS Pro的图形用户界面(GUI)完成数据处理任务,操作简单直观,适合初学者和快速处理小规模数据
方案二:Python:使用Python脚本结合ArcPy库进行数据处理,能够自动化处理大规模数据,提高效率,并且可扩展性强,适合对数据处理流程有一定了解的用户

专题二 空间数据采集与组织
1、空间数据的基本概念
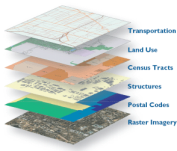
2、空间数据的分类:矢量数据、栅格数据、点云数据、多维数据
3、空间数据来源
4、地理数据库概述:地理数据库用于存储、管理和分析空间数据,常见类型包括文件型数据库(如Shapefile)和关系型数据库(如PostGIS)
5、地理数据库的设计与创建
专题三 空间数据转换与处理
1、数据转换
实操:使用ArcGIS Pro进行格式转换
实操:使用Python进行数据转换
2、地理处理工具简介
3、数据处理
实操:使用ArcGIS Pro进行数据处理
实操:使用Python进行数据处理

专题四 统计数据获取及处理
1、统计数据通常是通过问卷调查、普查、统计报告等方式获得的数值型数据
2、主要来源包括政府统计部门、研究机构、行业报告等
3、统计数据的处理与应用
实操:使用ArcGIS Pro进行统计数据空间化
实操:使用Python进行统计数据处理

专题五 GPS数据处理
1、GPS系统概述: GPS(全球定位系统)由卫星、地面控制系统和用户设备三部分组成,用于确定地理位置
2、GPS数据的采集与处理
实操:使用ArcGIS Pro导入GPS数据
实操:使用Python处理GPS数据
专题六 矢量数据获取及处理
1、矢量数据概述:矢量数据使用几何形状表示地理特征,常见格式包括Shapefile、GeoJSON等。
2、获取矢量数据:可以通过多种方式完成,包括从官方网站下载、利用API获取、从开放数据平台获取等。
3、矢量数据的采集与处理
实操:从网络获取行政区划数据以及预处理

专题七 栅格数据获取及处理
1、栅格数据概述:栅格数据由像元组成,每个像元包含一个或多个属性值,常见格式包括TIFF、GeoTIFF等。
2、栅格数据的采集与处理
实操:从网络获取栅格数据以及预处理
专题八 遥感云平台数据获取与处理
1、遥感云平台提供了高效的遥感数据获取、处理和分析功能,常见云平台包介绍
2、数据获取方式
3、遥感云平台数据类型
遥感影像数据: 包括多光谱、高光谱、合成孔径雷达(SAR)等类型的遥感影像数据
地表覆盖/土地利用数据: 通过遥感影像分类得到的地表覆盖类型和土地利用信息
植被指数数据: 如植被指数(NDVI)、归一化水体指数(NDWI)等,用于植被监测和环境评估
地表温度数据: 通过热红外遥感获取的地表温度数据,用于热岛效应、水文模型等应用
气象数据: 如气象卫星获取的降水数据、云量数据等,用于气候分析和预测
实操:使用ArcGIS Pro处理遥感云平台数据
专题九 点云数据获取及处理
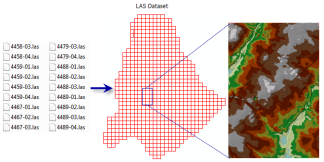
1、点云数据是由大量的三维点构成,主要通过LIDAR等技术获取,用于表示地形、建筑物等三维特征
2、获取点云数据
1)数据格式转换:根据需要,将点云数据转换成常见的格式,如LAS、LAZ等格式
2)数据过滤和去噪:对点云数据进行过滤和去噪,去除不需要的点或者噪声点,提高数据质量。可以使用各种滤波算法,如统计滤波、高斯滤波等进行数据去噪
3)数据配准和拼接:如果存在多个点云数据集,需要将它们进行配准和拼接,以获得完整的地区覆盖范围
4)数据提取和分析:根据具体需求,提取点云数据中的特定信息,如地形特征、建筑物等。可以利用GIS软件或者点云处理软件进行数据提取和分析
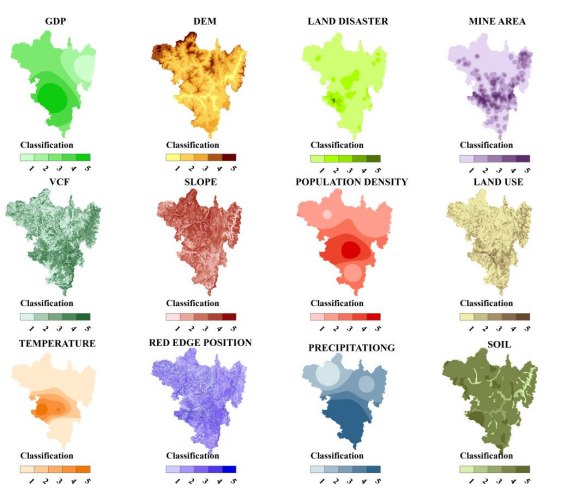
专题十 多维数据获取及处理
1、多多维数据是指具有多个维度(如时间、空间、高度等)的数据集合,常见于气象、地球科学、遥感等领域。多维数据具有复杂的数据结构和丰富的信息内容,在科学研究和实际应用中具有重要价值
2、数据获取方式
实操:在ArcGISPro中处理多维数据
实操:在 ArcGIS Pro 中利用模型构建器批处理多维数据
★ 点 击 下 方 关 注,获取海量教程和资源!
↓↓↓

















 1451
1451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









