




参考提案:JVET-K1002
一、
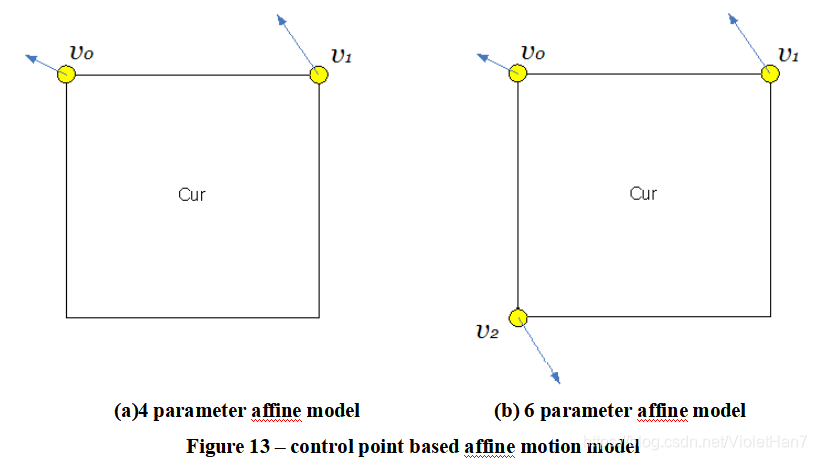
在HEVC中,运动补偿预测(MCP)仅采用平移运动模型。而在现实世界中,有很多种运动,比如放大/缩小、旋转、透视等不规则运动。在VTM中,采用了基于块的仿射变换运动补偿预测方法。如图13所示,通过两个控制点(4参数)或三个控制点运动向量(CPMV)(6参数)来描述块的仿射运动场(MF)。
对于4参数仿射运动模型,推导出块中样本位置(x, y)的运动向量为:

对于6参数仿射运动模型,推导出块中样本位置(x, y)的运动向量为:

式中(v0x, v0y)为左上角控制点的运动矢量,(v1x, v1y)为右上角控制点的运动矢量,(v2x, v2y)为左下角控制点的运动矢量。
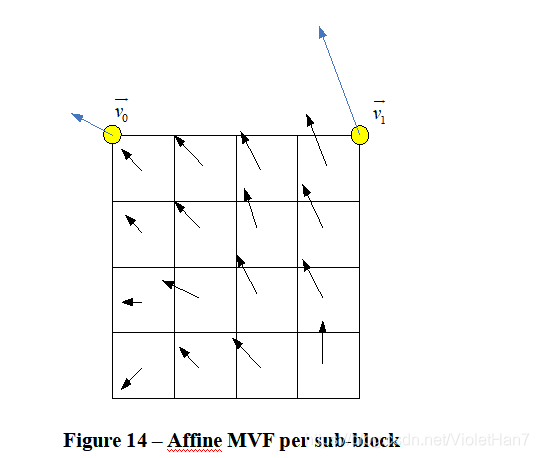
为了简化运动补偿预测,采用了基于块的仿射变换预测方法。获得每个4×4子块的运动矢量,每个子块的运动矢量中心的样本,如图14所示,根据上面的计算方程,四舍五入到1/16精度。然后应用运动补偿插值滤波器,利用导出的运动矢量对每个子块进行预测。
二、
在VTM中,有两种仿射运动模式:AF_IN
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1280
1280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









