








 本文详细解析批量归一化(BN)技术,介绍其在深度学习中的重要作用。探讨BN如何解决内部协变量偏移问题,改善梯度传播,提高学习效率,并解释BN的具体实施步骤及其在卷积神经网络中的应用。
本文详细解析批量归一化(BN)技术,介绍其在深度学习中的重要作用。探讨BN如何解决内部协变量偏移问题,改善梯度传播,提高学习效率,并解释BN的具体实施步骤及其在卷积神经网络中的应用。
论文地址:Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift
BN是2015年提出的,现在已经被广泛地应用在神经网络当中。其实关于BN的方方面面在维基上有着很详细的阐述,想深入研究的同学可以看一看。
以下我只稍微讲讲我觉得比较重要的部分。
为什么要进行BN?
简单一句话,就是为了训练参数更好更有效地向前传播。
而为什么参数会出现不好传播的情况呢?主要原因是激活函数的使用。为了增加模型的非线性表达能力,在层与层之间常常加上一层激活函数。而这层激活函数的存在会使得数据分布产生变化,大部分激活函数都会有一个敏感区间,而非敏感区间的数据有可能就在多层的参数传递后丢失了。尤其是在层数特别深的情况下,未经过标准化的数据起到的作用相当有限。
这个情况有一个名词,叫内部协变量偏移( internal covariate shift),即在训练过程中每一层网络的数据分布上参数的初始化与变化(层层叠加),将会影响整个网络的学习率。BN最初提出就是为了解决这个问题,但BN与covariate shift之间的关系实际上是未经实验严格证明的。
所以,BN层的作用是把一个mini-batch内的所有数据,从不规范的分布拉到正态分布。这样做的好处是使得数据能够分布在激活函数的梯度较大的区域,因此也提高了泛化能力,可以在一定程度上解决梯度消失的问题,同时可以减少dropout的使用。
当参数更好地向前传播后,梯度的下降会更加稳定,可以使用更大的学习率来加快学习。对数据分布的不断调整也减轻了对参数初始化的依赖,利于整体调参。
如何进行BN(BN的正向传播过程)?
BN其实就是将batch内的数据实现均值为0,方差为1的正态分布。BN一般放在激活函数之前。
如下图,步骤很简单:
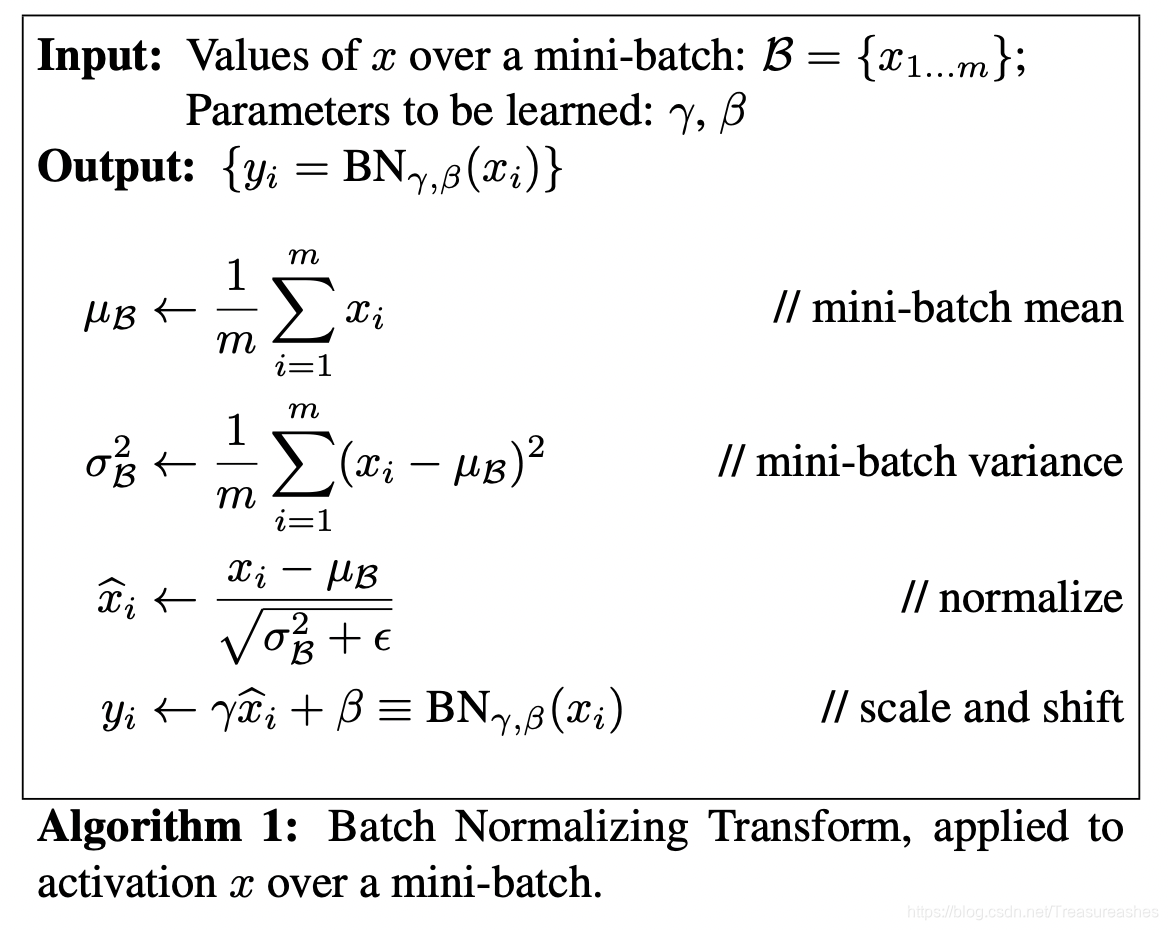
- 计算mini-batch中的均值(mini-batch mean)
- 计算mini-batch内的方差(mini-batch variance)
- 对每一个元素进行归一化(normalize)。我们知道正态分布的表达式是
,其中
是为了mini-batch的数值稳定性而加到方差中的一个常数。如果忽略它,每一个mini-batch的元素都是采样于同一个数据分布的值。
- 进行尺度缩放与偏移操作(scale and shift):其中偏移
(对应于均值)和尺度
(对应于方差)为参数,通过训练来学习的。目的是为了补偿网络的非线性表达能力。
为什么是mini-batch?
主要是由于目前主流的梯度更新方式是mini-batch gradient decent,小批的梯度下降,这种方法把数据分为若干个批,按批来更新参数,这样,一个批中的一组数据共同决定了本次梯度的方向,下降起来就不容易跑偏,减少了随机性。另一方面因为批的样本数与整个数据集相比小了很多,计算量也不是很大。
当mini-batch中只有一条数据,如何确定1.2.中的均值与方差?
可以采用训练收敛最后几批mini batch的 𝜇和𝜎的期望,作为预测阶段的𝜇和𝜎。
为什么?一开始我们就想用所有数据的均值和方差,但是对于模型训练迭代是不现实的,所以用了mini-batch的均值和方差。现在训练收敛最后几批的数据分布,可以看作是全局的数据分布,其均值和方差可以直接用当然更好。
BN的训练过程?

整个训练过程没有什么特别的,只是加上了BN层进行计算而已。但当训练结束后,每一层的BN就不是很必要了,因为它的两个参数和
已经固定,inference时BN可以用一个线性变换来替换(11行)。
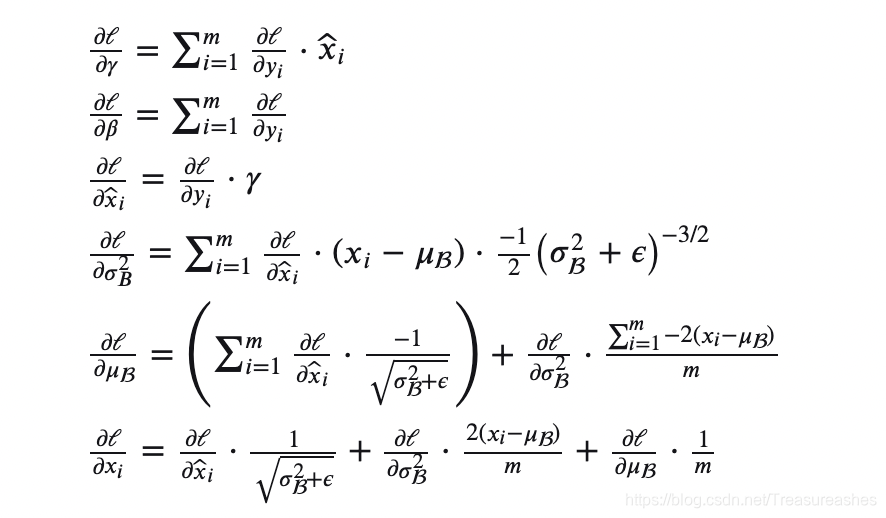
BN的反向传播?
其实这就是用传播图与链式法则求导而来,原文中没有过多解释。我试了试,推的过程不是很难,就是要注意函数之间的复合情况,画一个计算图更不容易漏掉。
卷积层如何使用BN?
一个卷积核产生1个feature map, 一个feature map 就会有1对参数和
。为了在卷积层上保持BN的性质,不仅要在mini-batch之间进行BN,也要在不同的位置的feature map之间进行BN。对于卷积层来说,不是在每个激活元之间共享参数,而是跨mini-batch的feature map 要共享一对参数。
所以此时,在算法中的从一个mini-batch(size m)的所有值集合变成了跨mini-batch的feature map(size m p q)的所有值集合。参数对的个数也从p*q*c(channel)变成了c。
如果还不是很理解,可以看这个答案:Batch Normalization in Convolutional Neural Network

















 222
222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









