






 本文深入探讨了随机网络优化理论,重点介绍了李雅普诺夫优化方法在通信与排队系统中的应用。通过双用户无线调度系统实例,讲解了在不同条件下最小化时间平均功率和最大化吞吐量的策略。文章还详细阐述了李雅普诺夫漂移的概念及其在随机优化问题中的关键作用。
本文深入探讨了随机网络优化理论,重点介绍了李雅普诺夫优化方法在通信与排队系统中的应用。通过双用户无线调度系统实例,讲解了在不同条件下最小化时间平均功率和最大化吞吐量的策略。文章还详细阐述了李雅普诺夫漂移的概念及其在随机优化问题中的关键作用。
【参考书目】Stochastic Network Optimization with Application to Communication and Queueing Systems
【作者】(美)Michael J.Neely---University of Southern California
【出版社】MORGAN&CLAYPOOL PUBLISHERS
目录
李雅普诺夫漂移(LYAPUNOV DRIFT)与李雅普诺夫优化
相关主题
- 队列稳定性理论
- 背压机制,最大权重和虚拟队列方法
- 针对非凸随机利用率最大化的对偶方法
- 对于任意采样路径的全局优化
- 近似随机调度理论
- 更新系统和马尔可夫决策系统的优化
背景知识
- 基本的概率概念
- 马尔可夫链
- 标准优化
四个基本概念
- 伸缩求和(telescoping sums)
对于任意的f(t):
在每一步控制函数的变化允许了人们可以控制函数的结束值。
- 迭代的期望(iterated expectations)
对于任意随机的变量X与Y,有:
![]()
其中外部期望是关于Y的分布,而内部期望是关于给定Y的X的条件分布
- 随机最小化期望(opportunistically minimizing an expectation)
- 简森不等式(Jensen’s inequality)
(凸)函数的期望值大于或等于期望的函数值
李雅普诺夫考虑的是随机网络(拥有随机事件、时变性及不确定性的网络)的分析与优化,主要关注通信系统和排队系统。但是,只要问题可以被转化为:在不确定参数的时间平均限制下,优化确定参数(certain quantities)的时间平均限制,就可以用李雅普诺夫优化方法。
几个简单的随机调度例子
【最基本模型】双用户无线调度系统
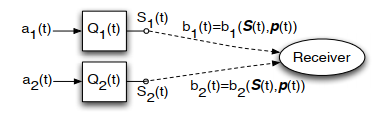
对于每个时隙(slot)t:
【假设】网络控制器可以在每个时隙转移
观察信道条件之后,再进行功率分配
![]() -----新的到达
-----新的到达
![]() -----等待传输的队列
-----等待传输的队列
![]() -----信道条件
-----信道条件
![]() -----功率分配
-----功率分配
![]() -----可能的功率分配集合
-----可能的功率分配集合
![]() -----转移率函数
-----转移率函数
![]() -----队列的动态表达式
-----队列的动态表达式
示例问题1:在稳定性条件下最小化时间平均功率
【问题规划】

![]() -----用户k在特定的功率分配下的时间平均功率消耗
-----用户k在特定的功率分配下的时间平均功率消耗
在每个时隙,不需要与到达和信道相关的概率的先验知识
![]() -----越大的V越优
-----越大的V越优
![]() -----平均队伍积压(queue backlogs)与时延的折衷
-----平均队伍积压(queue backlogs)与时延的折衷
示例问题2:在时间平均功率条件下最大化吞吐量
【假设】到达的过程可以被 一个流量控制机制控制,即何时到达也需要被决定
【问题规划】
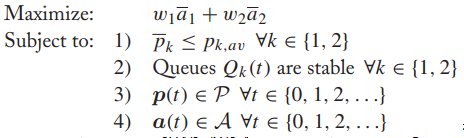
![]() -----数据准入
-----数据准入
![]() -----用户k的数据准入速率
-----用户k的数据准入速率
![]() -----正的权重,分别代表了两个用户的重要性
-----正的权重,分别代表了两个用户的重要性
![]() -----两个用户给定的平均功率限制
-----两个用户给定的平均功率限制
示例问题3:在时间平均功率条件下最大化吞吐量
【假设】吞吐量由线性函数变为凹函数
【问题规划】
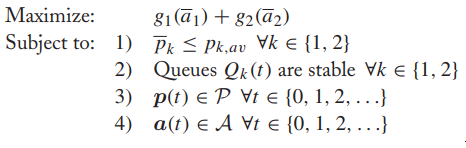
![]() -----【效用函数】在a不小于0的情况下的连续的、凹的非减函数(可以在两用户之间达到“公平”,但若其为线性,优化它的结果通常是一个为1一个为0)
-----【效用函数】在a不小于0的情况下的连续的、凹的非减函数(可以在两用户之间达到“公平”,但若其为线性,优化它的结果通常是一个为1一个为0)
![]() -----典型的效用函数形式(还有其它几种形式),前者提供的公平性经常被称为比例公平性。
-----典型的效用函数形式(还有其它几种形式),前者提供的公平性经常被称为比例公平性。
![]() -----用户1在达到了吞吐量下的效用或满意度
-----用户1在达到了吞吐量下的效用或满意度
常见的随机优化问题
考虑一个随机网络在离散的时隙间运行,它可以被描述为队列积压的集合。
![]() -----队列积压向量,K为非零的整数,K=0时表示没有队列
-----队列积压向量,K为非零的整数,K=0时表示没有队列
对于每一个时隙,控制的行为(control action)会影响队列的到达与离开,并产生一个实时的特征向量集合:

![]() -----非负整数,用于区分平等约束和两种类型的不平等约束
-----非负整数,用于区分平等约束和两种类型的不平等约束
这些特征可以是正的,也可以是负的,它们代表与时隙t上的网络相关联的惩罚或奖励,例如功耗、失真或丢包/接纳。这些特征也可由一般函数给出:
![]() -----时隙t所观察到的随机事件,如到达、信道条件等
-----时隙t所观察到的随机事件,如到达、信道条件等
![]() -----在时隙t所采用的动作,如接入、转移等
-----在时隙t所采用的动作,如接入、转移等
![]() -----依赖于w(t)
-----依赖于w(t)
![]() -----在特定控制算法下的时间平均量
-----在特定控制算法下的时间平均量
【问题规划】
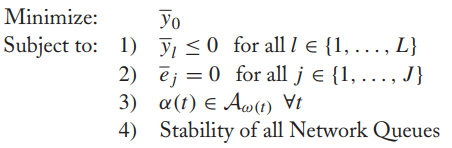
【问题规划】优化时间平均的凸函数
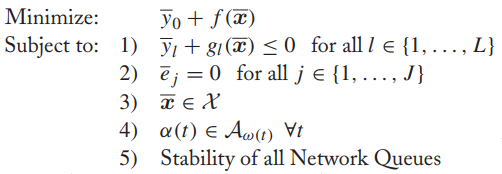
![]()
![]() -----RM封闭的凸的子集
-----RM封闭的凸的子集
![]() -----在给定控制算法下的平均时间特征向量
-----在给定控制算法下的平均时间特征向量
上述提出的两大问题,可以被叫作随机规划(stochastic programs),是静态优化理论的经典线性规划和凸规划的类似。事实证明,排队论在这类随机优化中起着核心作用。即使原始问题中没有底层队列,我们也可以引入虚拟队列(virtual queues)作为确保满足所需时间平均约束的强有力的方法。低效的控制操作会在某些队列中导致更大的积压。这些积压充当“足够的统计数据”,作为下一个控制决策的基础。这使得算法不需要知道与随机网络事件ω( t )相关联的概率。
李雅普诺夫漂移(LYAPUNOV DRIFT)与李雅普诺夫优化
STEP 1:找出要解决的问题的限制
STEP 2:构造虚构队列帮助达到这些限制
STEP 3:定义李雅普诺夫函数(Lyapunov function)来描述所有在时隙t的虚拟队列的积压的平方。(网络拥塞的标量测度)
STEP 4:定义两个时隙间李雅普诺夫函数的变化:
![]()
STEP 5:最小化每个时隙的李雅普诺夫函数的变化,又称最小化李雅普诺夫漂移:
如果目标函数可以被映射到适当的惩罚函数,则可以在每个时隙t贪婪地最小化漂移加惩罚(drift-plus-penalty):
![]()
![]() -----一个非负的控制参数
-----一个非负的控制参数

















 4955
4955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









