 矿井突水水流模型与逃生方案
矿井突水水流模型与逃生方案





我是Tina表姐,毕业于中国人民大学,对数学建模的热爱让我在这一领域深耕多年。我的建模思路已经帮助了百余位学习者和参赛者在数学建模的道路上取得了显著的进步和成就。现在,我将这份宝贵的经验和知识凝练成一份全面的解题思路与代码论文集合,专为本次赛题设计,旨在帮助您深入理解数学建模的每一个环节。
本次2025年高教杯全国大学生数学建模国赛C题可以做如下考虑 (部分公式和代码因为知乎排版问题显示不完整,文中代码仅有部分,完整论文格式标准,包含全部代码)
可视化

问题 1
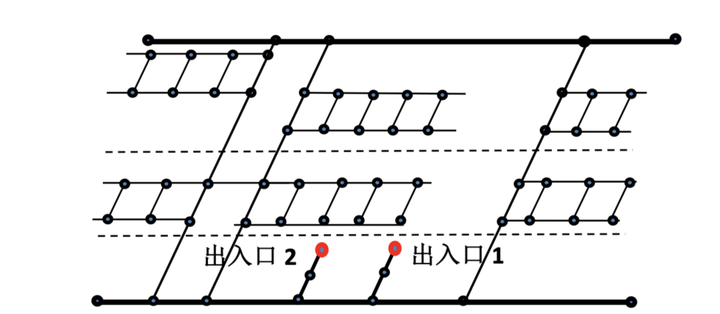
若巷道的某一点发生突水,试分析水流过程,建立突水水流在巷道的流动漫延模型。
对附件 1 和附件 2 给出的两个矿井巷道网络,分别给出网络中各巷道水流的变化情况,其中:
- 附件 1 中的突水点位置为 A1 (5349.03,4931.90,10.00)
- 附件 2 中的突水点位置为 A2 (4143.12,4376.28,6.33)
要求将结果分别保存到文件 result1-1.xlsx 和 result1-2.xlsx 中,其中需要计算:
- 端点水流到达时刻:突水水流首次流经该点的时刻
- 巷道充满水时刻:巷道中水流的水平面达到巷道最高点的时刻
这个问题的核心是建立水流在矿井巷道网络中的漫延传播模型,分析水流如何从突水点开始,沿着巷道网络向各个方向扩散的过程。
来为矿井突水水流漫延问题建立数学模型。
问题1:突水水流漫延数学模型
1. 问题分析
这是一个在三维巷道网络中的水流传播问题。需要考虑:
- 水流在重力作用下的流动
- 巷道网络的拓扑结构
- 水流在分叉点的分流规律
- 水流到达时间和充满时间的计算
2. 模型假设
- 巷道断面为矩形(宽4m,高3m)
- 水流初始水位为0.1m
- 突水量恒定为30 m³/min
- 水流在分叉点平均分流
- 水流优先向下流动(重力作用)
3. 数学模型建立
3.1 巷道网络表示
设巷道网络为有向图 G = (V, E),其中:
- V = {v₁, v₂, …, vₙ} 为端点集合
- E = {e₁, e₂, …, eₘ} 为巷道集合
每个端点 vᵢ 有坐标 (xᵢ, yᵢ, zᵢ)
3.2 巷道参数计算
对于巷道 eᵢⱼ(连接端点 vᵢ 和 vⱼ):
长度:
Lᵢⱼ = √[(xⱼ-xᵢ)² + (yⱼ-yᵢ)² + (zⱼ-zᵢ)²]
坡度:
sᵢⱼ = (zⱼ - zᵢ) / Lᵢⱼ
体积:
Vᵢⱼ = Lᵢⱼ × 4 × 3 = 12Lᵢⱼ (m³)
3.3 水流速度模型
考虑重力和坡度影响,水流速度为:
vᵢⱼ(t) = v₀ × (1 + α × sᵢⱼ)
其中:
- v₀ = 2 m/s(基准流速)
- α = 0.5(坡度影响系数)
- sᵢⱼ > 0 表示下坡,sᵢⱼ < 0 表示上坡
3.4 水流传播时间
巷道传播时间:
Tᵢⱼ = Lᵢⱼ / vᵢⱼ
端点到达时间:
从突水点开始,使用Dijkstra算法计算最短时间路径:
T(vᵢ) = min{T(path) | path from source to vᵢ}
3.5 水位变化模型
对于任意时刻 t,巷道 eᵢⱼ 中的水量:
W(eᵢⱼ, t) = ∫[T(vᵢ)]^t Q(τ) × f(eᵢⱼ, τ) dτ
其中:
- Q(t) = 30 m³/min(突水流量)
- f(eᵢⱼ, t) 为该巷道在时刻t的分流系数
水位高度:
将为问题1建立突水水流在巷道网络中的漫延模型,并用LaTeX格式表示相关数学公式。
问题1:突水水流漫延模型
1. 模型基础假设
根据题目描述,建立以下基础参数:
- 巷道矩形断面:宽度 w=4w = 4w=4 m,高度 h=3h = 3h=3 m
- 断面积:S=w×h=12S = w \times h = 12S=w×h=12 m²
- 突水流量:Q=30Q = 30Q=30 m³/min = 0.50.50.5 m³/s
- 初始水位:h0=0.1h_0 = 0.1h0=0.1 m
2. 水流传播机制
2.1 单一巷道中的水流传播
对于长度为 LLL 的巷道段,水流传播遵循以下规律:
水流前锋速度:
v=Qw×h0=0.54×0.1=1.25 m/sv = \frac{Q}{w \times h_0} = \frac{0.5}{4 \times 0.1} = 1.25 \text{ m/s}v=w×h0Q=4×0.10.5=1.25 m/s
水流到达巷道末端的时间:
tarrive=Lv=L1.25t_{arrive} = \frac{L}{v} = \frac{L}{1.25}tarrive=vL=1.25L
2.2 巷道充水过程
当水流到达巷道末端后,该巷道开始充水。充水体积为:
Vtunnel=L×w×h=L×4×3=12L m³V_{tunnel} = L \times w \times h = L \times 4 \times 3 = 12L \text{ m³}V
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1749
1749



 到【灌水乐园】发言
到【灌水乐园】发言








