




相关全球定位知识
术语缩写
GNSS全球导航卫星系统
GNSS 全球导航卫星系统 Global Navigation Satellite System ,泛指所有的卫星导航系统,包括全球的、区域的和增强的等还涵盖在建和以后要建设的其他卫星导航系统。国际GNSS系统是个多系统、多层面、多模式的复杂组合系统。
全球:中国 BDS(北斗)、美国 GPS、俄罗斯 Glonass(格洛纳斯)、欧盟 Galileo(伽利略)
区域:印度区域导航卫星系统IRNSS、日本QZSS
增强系统:美国的WAAS(广域增强系统)、欧洲的EGNOS(欧洲静地导航重叠系统)和日本的MSAS(多功能运输卫星增强系统
载波、测距码、导航电文
卫星信号分为三种:载波、测距码、导航电文。
载波(Carrier):
载波是由GPS卫星发射的基本信号,它是一种高频率的电磁波,携带着大量的信息。载波信号是一种连续波形,它没有提供任何关于时间的信息,因此无法直接用于测量距离或确定位置。 GPS信号的载波频率通常在L波段(1-2 GHz)。
测距码(Pseudo-random Code):
测距码是一种短周期、高重复率的序列,每颗卫星都有独特的测距码。接收机使用测距码来测量信号的传播时间,从而计算出卫星与接收机之间的距离。测距码与载波相结合,可以实现GPS信号的精确测量和距离计算。
导航电文(Navigation Message):
导航电文是由GPS卫星发射的一种数据流,包含了卫星的精确位置、时钟偏移、卫星健康状态等信息。 导航电文以一定的速率(通常为50 bps)传输。 接收机使用导航电文来解算卫星的位置和时间信息,从而确定自身的位置。
CORS 连续运行卫星定位服务综合系统
CORS是一种基于网络的 RTK 技术扩展系统
定位分类
1、卫星定位
基本原理是通过测量卫星信号到接收器的传播时间乘以光速来确定卫星和接收器的距离,再配合三角测量法(其中三颗卫星得到三维,第四颗卫星同步时间)得到接收器的三维位置(经度、纬度、高度)。
GPS定位过程主要可以分为以下几个阶段:
信号捕获:接收器搜索并捕获卫星信号。这个阶段可能需要一些时间,特别是在冷启动的情况下,即接收器没有最近的位置信息或星历数据时。
信号跟踪:接收器锁定卫星信号并持续跟踪。
伪距测量:接收器测量卫星信号到达的时间,从而计算出伪距。
定位计算:接收器使用伪距和卫星的位置信息来计算自己的位置。
2、基站定位
基站定位是一种利用移动通信基站(如手机网络基站)信号的强度和位置信息来确定移动设备位置的定位方法。(无法定位海拔)
差分定位DGPS
1、按处理方式:
位置差分:
位置差分适用于 基准站和用户站观测同一组卫星,用户与基准站间距离在100km以内的情况。安装在基准站上的GNSS接收机观测4颗卫星后便可进行三维定位,解算出基准站的坐标。由于存在着轨道误差、时钟误差、SA影响、大气影响、多径效应以及其他误差,解算出的坐标与基准站的已知坐标是不一样的存在误差。基准站利用数据链将此改正数发送出去,由用户站接收,并且对其解算的用户站坐标进行改正。
伪距差分 —— RTD技术(Real Time Differential)实时动态码相位差分技术
工作方法 根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,属于码差分技术。
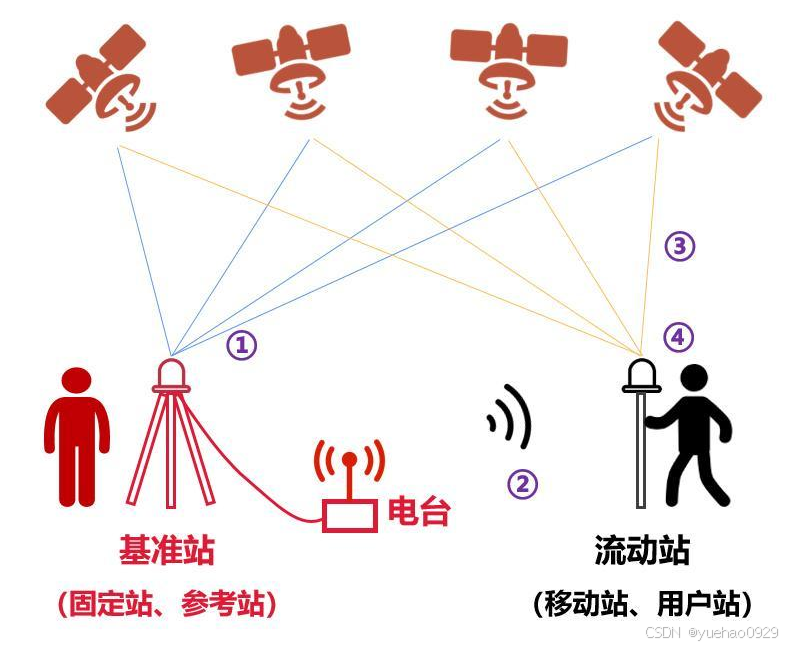
载波相位差分 —— RTK(Real - time kinematic)实时动态差分法
传统RTK工作模式,只有一个基准站。基准站将 测量数据 与 已知的位置数据进行计算得出载波相位观测值,然后将 载波相位观测值 通过电台发送给用户设备(流动站)。将其与自身接收到的卫星信号进行比较。通过计算差异,可以校正自身的位置,实现高精度的定位信息。
网络NRTK工作模式,在一个较大的区域内,均匀分散设置多个基准站(3个或以上),构成一个基准站网。多个基准站组成的基准站网,它们将数据发给中央服务器。利用各个参考站的观测信息,通过建立精确的误差模型来修正距离相关误差,在用户站附近产生一个物理上不存在的虚拟参考站VRS,计算得出更加精确的数据传给用户设备(流动站)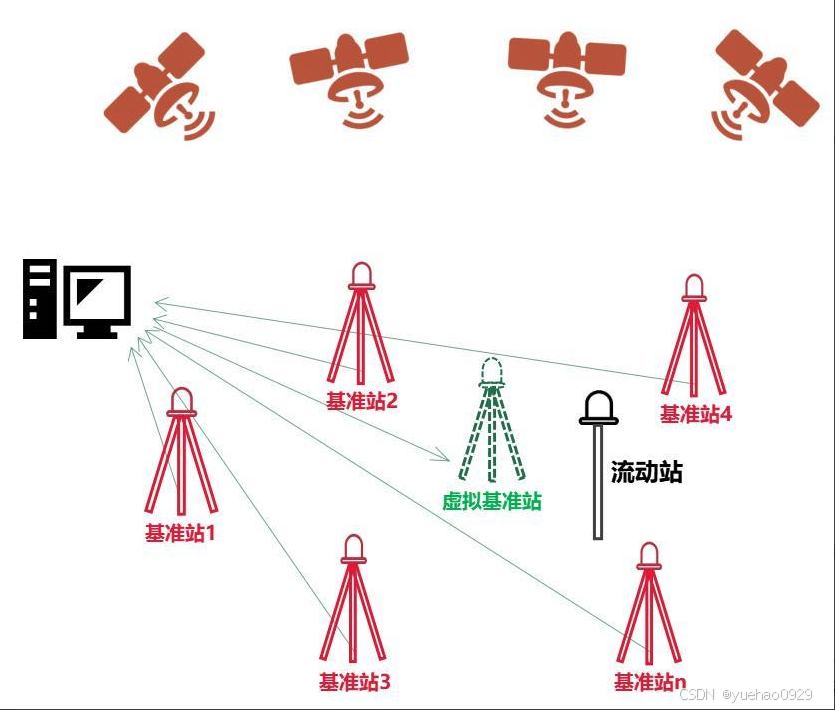
PPK事后动态载波相位差分技术 Post Processed Kinematic
一种与RTK相对应的定位技术,这是一种利用载波相位观测值进行事后处理的动态相对定位技术,而RTK是实时的。 因为是进行事后处理,所以用户无需配备数据通信链(可以节省流量费用了),观测更方便、自由,适合于无需实时获取定位结果的应用领域。
PPP 精密单点定位 Precise Point Positioning
PPP通过全球分布的约100个基准站,解算高精度卫星星历产品、修正用户轨道、钟差误差等,即可获得静态毫米至厘米级,动态厘米至分米级的定位服务。但和RTK瞬时厘 米级相比,PPP需要近30分钟才能实现精密定位的初始化,且信号失锁后的重新初始化时间与首次初始化时间几乎一样长,因而限制了其在实时应用中的普及。RTK、PPK、RTD属于相对定位的范畴,PPP属于绝对定位的范畴。
经纬度
E / W / S / N (东经 / 西经 / 南纬 / 北纬)
| 格式 | 显示 | 具体 |
|---|---|---|
| 度 | ( ddd.ddddd °) | 十进制小数部分(5位) 百度地图,谷歌地图,手机自带gps经纬度输出 |
| 度 . 分 | (ddd°mm.mmm’ ) | 十进制小数部分(3位),引自 GPGGA 语句 |
| 度 . 分 . 秒 | (ddd°mm’ss’’) | 谷歌地图 |
综合问题
1、gps信号和4g信号相互影响
1.3.2网络RTK技术(Network RTK)
RTK是一种利用GPS载波相位观测值进行实时动态相对定位的技术。进行RTK测量时,至少需配备2台GPS接收机,一台安装在基准站上,另一台在基准站附近进行实时相对定位,进而根据基准站的坐标求得自己的三维坐标。随着流动站与基准站之间的距离的增加,各种误差的空间相关性将迅速下降,因此在RTK测量中流动站和基准站之间的距离一般只能在15km以内。
通常把在一个区域内建立多个(一般为三个或三个以上)的GPS参考站,对该区域构成网状覆盖,并以这些基准站中的一个或多个为基准计算和发播GPS改正信息,从而对该地区内的GPS用户进行实时改正的定位方式称为GPS网络RTK,又称为多基准站RTK。
采用网络RTK技术时,需要在一个较大的区域内大体均匀地布设若干个基准站,基准站间的距离可扩大至50-100km,显然流动站到最近的基准站的距离可能大于15km,因此我们利用在流动站周围的几个基准站的观测值和已知的站坐标在解算,这样用户仍有可能获得厘米级的定位精度。
利用多基站网络RTK技术建立的连续运行参考站(Continuously Operating Reference Stations),缩写为CORS)已成为城市GNSS应用的发展热点之一。


















 4289
4289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









