




1 临界区保护
1.1 问题引入
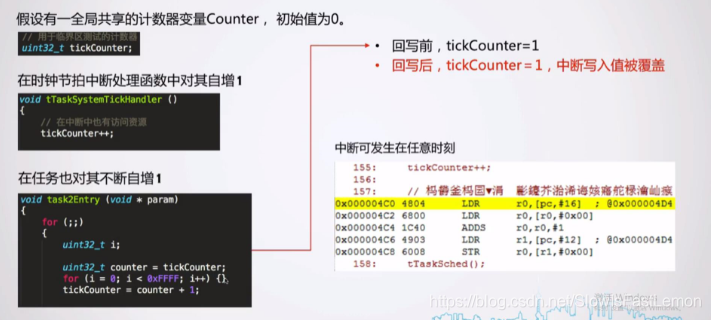
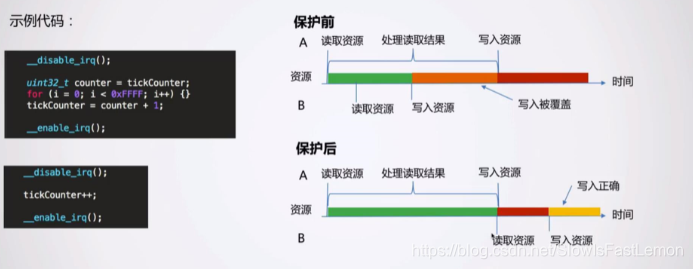
首先看一下如下问题:
原因分析:
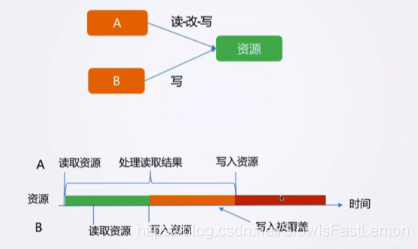
- 根本原因在于读-改-写过程中随时会被打断,再恢复运行时写,导致打断过程中其它写的效果被覆盖。
1.2 临界区概念
临界区的概念如下:
- 临界区指的是访问多个任务共享资源的一段代码。当有任务进入临界区时,其它任务必须等待直至该任务离开临界区,以确定共享资源的访问不会冲突。
由于共享资源的访问存在于任务与任务之间、任务与中断ISR之间;那么,只需要防止任务在访问共享资源时,切换至其它任务或防止中断发生即可。
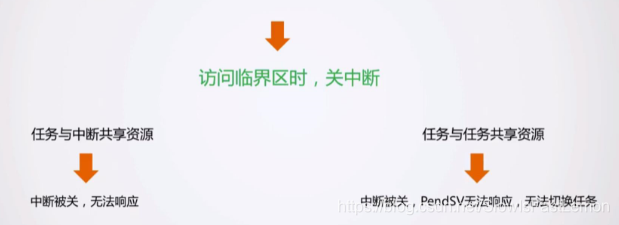
1.3 使用关中断保护临界区
我们可以使用关中断来保护临界区,如下:
但是当中断发生嵌套的时候就会出现问题:
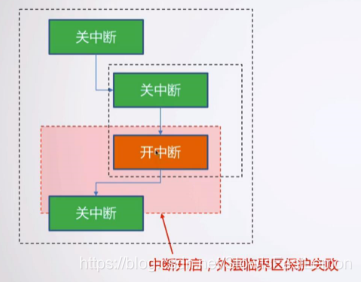
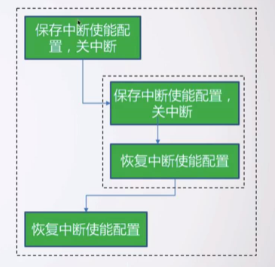
所以我们需要采用如下的解决方案:
1.4 设计实现
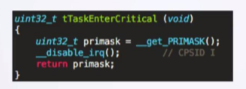
中断控制寄存器PRIMASK:

进入临界区:
退出临界区:
这里只贴一下main.c文件中的内容:
/*************************************** Copyright (c)******************************************************
** File name : main.c
** Latest modified Date : 2016-06-01
** Latest Version : 0.1
** Descriptions : 主文件,包含应用代码
**
**--------------------------------------------------------------------------------------------------------
** Created by : 01课堂 lishutong
** Created date : 2016-06-01
** Version : 1.0
** Descriptions : The original version
**
**--------------------------------------------------------------------------------------------------------
** Copyright : 版权所有,禁止用于商业用途
** Author Blog : http://ilishutong.com
**********************************************************************************************************/
#include "tinyOS.h"
#include "ARMCM3.h"
// 当前任务:记录当前是哪个任务正在运行
tTask * currentTask;
// 下一个将即运行的任务:在进行任务切换前,先设置好该值,然后任务切换过程中会从中读取下一任务信息
tTask * nextTask;
// 空闲任务
tTask * idleTask;
// 所有任务的指针数组:简单起见,只使用两个任务
tTask * taskTable[2];
// 用于临界区测试的计数器
uint32_t tickCounter;
/**********************************************************************************************************
** Function name : tTaskInit
** Descriptions : 初始化任务结构
** parameters : task 要初始化的任务结构
** parameters : entry 任务的入口函数
** parameters : param 传递给任务的运行参数
** Returned value : 无
***********************************************************************************************************/
void tTaskInit (tTask * task, void (*entry)(void *), void *param, uint32_t * stack)
{
// 为了简化代码,tinyOS无论是在启动时切换至第一个任务,还是在运行过程中在不同间任务切换
// 所执行的操作都是先保存当前任务的运行环境参数(CPU寄存器值)的堆栈中(如果已经运行运行起来的话),然后再
// 取出从下一个任务的堆栈中取出之前的运行环境参数,然后恢复到CPU寄存器
// 对于切换至之前从没有运行过的任务,我们为它配置一个“虚假的”保存现场,然后使用该现场恢复。
// 注意以下两点:
// 1、不需要用到的寄存器,直接填了寄存器号,方便在IDE调试时查看效果;
// 2、顺序不能变,要结合PendSV_Handler以及CPU对异常的处理流程来理解
*(--stack) = (unsigned long)(1<<24); // XPSR, 设置了Thumb模式,恢复到Thumb状态而非ARM状态运行
*(--stack) = (unsigned long)entry; // 程序的入口地址
*(--stack) = (unsigned long)0x14; // R14(LR), 任务不会通过return xxx结束自己,所以未用
*(--stack) = (unsigned long)0x12; // R12, 未用
*(--stack) = (unsigned long)0x3; // R3, 未用
*(--stack) = (unsigned long)0x2; // R2, 未用
*(--stack) = (unsigned long)0x1; // R1, 未用
*(--stack) = (unsigned long)param; // R0 = param, 传给任务的入口函数
*(--stack) = (unsigned long)0x11; // R11, 未用
*(--stack) = (unsigned long)0x10; // R10, 未用
*(--stack) = (unsigned long)0x9; // R9, 未用
*(--stack) = (unsigned long)0x8; // R8, 未用
*(--stack) = (unsigned long)0x7; // R7, 未用
*(--stack) = (unsigned long)0x6; // R6, 未用
*(--stack) = (unsigned long)0x5; // R5, 未用
*(--stack) = (unsigned long)0x4; // R4, 未用
task->stack = stack; // 保存最终的值
task->delayTicks = 0;
}
/**********************************************************************************************************
** Function name : tTaskSched
** Descriptions : 任务调度接口。tinyOS通过它来选择下一个具体的任务,然后切换至该任务运行。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSched ()
{
// 进入临界区,以保护在整个任务调度与切换期间,不会因为发生中断导致currentTask和nextTask可能更改
uint32_t status = tTaskEnterCritical();
// 空闲任务只有在所有其它任务都不是延时状态时才执行
// 所以,我们先检查下当前任务是否是空闲任务
if (currentTask == idleTask)
{
// 如果是的话,那么去执行task1或者task2中的任意一个
// 当然,如果某个任务还在延时状态,那么就不应该切换到他。
// 如果所有任务都在延时,那么就继续运行空闲任务,不进行任何切换了
if (taskTable[0]->delayTicks == 0)
{
nextTask = taskTable[0];
}
else if (taskTable[1]->delayTicks == 0)
{
nextTask = taskTable[1];
}
else
{
tTaskExitCritical(status);
return;
}
}
else
{
// 如果是task1或者task2的话,检查下另外一个任务
// 如果另外的任务不在延时中,就切换到该任务
// 否则,判断下当前任务是否应该进入延时状态,如果是的话,就切换到空闲任务。否则就不进行任何切换
if (currentTask == taskTable[0])
{
if (taskTable[1]->delayTicks == 0)
{
nextTask = taskTable[1];
}
else if (currentTask->delayTicks != 0)
{
nextTask = idleTask;
}
else
{
tTaskExitCritical(status);
return;
}
}
else if (currentTask == taskTable[1])
{
if (taskTable[0]->delayTicks == 0)
{
nextTask = taskTable[0];
}
else if (currentTask->delayTicks != 0)
{
nextTask = idleTask;
}
else
{
tTaskExitCritical(status);
return;
}
}
}
tTaskSwitch();
// 退出临界区
tTaskExitCritical(status);
}
/**********************************************************************************************************
** Function name : tTaskSystemTickHandler
** Descriptions : 系统时钟节拍处理。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSystemTickHandler ()
{
// 检查所有任务的delayTicks数,如果不0的话,减1。
int i;
uint32_t status = tTaskEnterCritical();
for (i = 0; i < 2; i++)
{
if (taskTable[i]->delayTicks > 0)
{
taskTable[i]->delayTicks--;
}
}
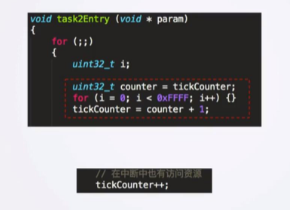
// 在中断中也有访问资源
tickCounter++;
tTaskExitCritical(status);
// 这个过程中可能有任务延时完毕(delayTicks = 0),进行一次调度。
tTaskSched();
}
/**********************************************************************************************************
** Function name : taskDelay
** Descriptions : 使当前任务进入延时状态。
** parameters : delay 延时多少个ticks
** Returned value : 无
***********************************************************************************************************/
void taskDelay (uint32_t delay) {
// 配置好当前要延时的ticks数
uint32_t status = tTaskEnterCritical();
currentTask->delayTicks = delay;
tTaskExitCritical(status);
// 然后进行任务切换,切换至另一个任务,或者空闲任务
// delayTikcs会在时钟中断中自动减1.当减至0时,会切换回来继续运行。
tTaskSched();
}
/*********************************************************************************************************
** 系统时钟节拍定时器System Tick配置
** 在我们目前的环境(模拟器)中,系统时钟节拍为12MHz
** 请务必按照本教程推荐配置,否则systemTick的值就会有变化,需要查看数据手册才了解
**********************************************************************************************************/
void tSetSysTickPeriod(uint32_t ms)
{
SysTick->LOAD = ms * SystemCoreClock / 1000 - 1;
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
SysTick->VAL = 0;
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
}
/**********************************************************************************************************
** Function name : SysTick_Handler
** Descriptions : SystemTick的中断处理函数。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void SysTick_Handler ()
{
tTaskSystemTickHandler();
}
/**********************************************************************************************************
** 应用示例
** 有两个任务,分别执行task1Entry和task2Entry。功能是分别对相应的变量进行周期性置0置1.
** 每个任务都可以占用一段时间的CPU,一旦用完了,就会被强制暂停,切换到另一个任务中去。
** 本例中有全局共享的变量criticalCounter,同时在taskDelay和tTaskSystemTickHandler中修改。
** 如果不加临界区保护,则在tTaskSystemTickHandler中对criticalCounter的修改将会丢失
**********************************************************************************************************/
int task1Flag;
void task1Entry (void * param)
{
tSetSysTickPeriod(10);
for (;;)
{
task1Flag = 1;
taskDelay(1);
task1Flag = 0;
taskDelay(1);
}
}
int task2Flag;
void task2Entry (void * param)
{
for (;;)
{
// 临界区演示的计数器
uint32_t i;
// 由于有临界区的保护,所以即便是这中间中断产生,也不会立即响应中断。
// criticalCounter的值会被正确修改。等待退出临界区时,才会响应中断,在中断中修改criticalCounter
// 最终不会导致冲突
// 进入临界区
uint32_t status = tTaskEnterCritical();
uint32_t counter = tickCounter;
for (i = 0; i < 0xFFFF; i++) {} // 故意产生长的延时,以便在此期间发生中断
tickCounter = counter + 1;
// 退出临界区
tTaskExitCritical(status);
task2Flag = 1;
taskDelay(1);
task2Flag = 0;
taskDelay(1);
}
}
// 任务1和任务2的任务结构,以及用于堆栈空间
tTask tTask1;
tTask tTask2;
tTaskStack task1Env[1024];
tTaskStack task2Env[1024];
// 用于空闲任务的任务结构和堆栈空间
tTask tTaskIdle;
tTaskStack idleTaskEnv[1024];
void idleTaskEntry (void * param) {
for (;;)
{
// 空闲任务什么都不做
}
}
int main ()
{
// 初始化任务1和任务2结构,传递运行的起始地址,想要给任意参数,以及运行堆栈空间
tTaskInit(&tTask1, task1Entry, (void *)0x11111111, &task1Env[1024]);
tTaskInit(&tTask2, task2Entry, (void *)0x22222222, &task2Env[1024]);
// 接着,将任务加入到任务表中
taskTable[0] = &tTask1;
taskTable[1] = &tTask2;
// 创建空闲任务
tTaskInit(&tTaskIdle, idleTaskEntry, (void *)0, &idleTaskEnv[1024]);
idleTask = &tTaskIdle;
// 我们期望先运行tTask1, 也就是void task1Entry (void * param)
nextTask = taskTable[0];
// 切换到nextTask, 这个函数永远不会返回
tTaskRunFirst();
return 0;
}
参考资料:

















 5630
5630

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









