






目录
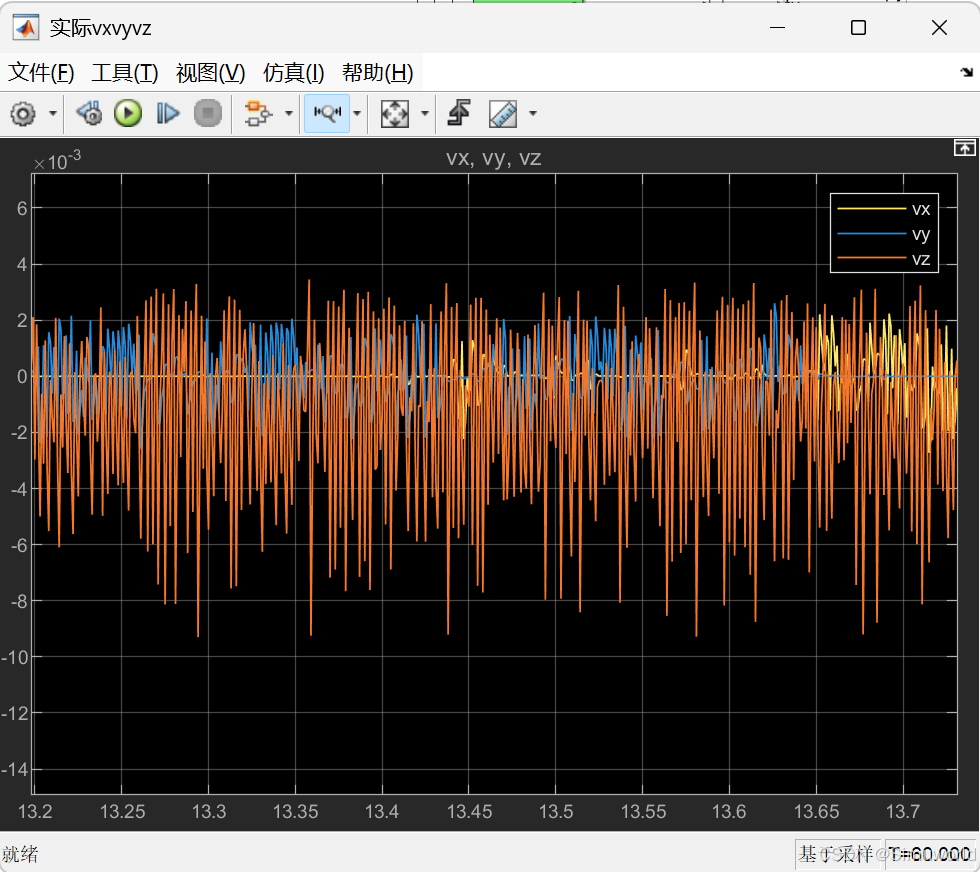
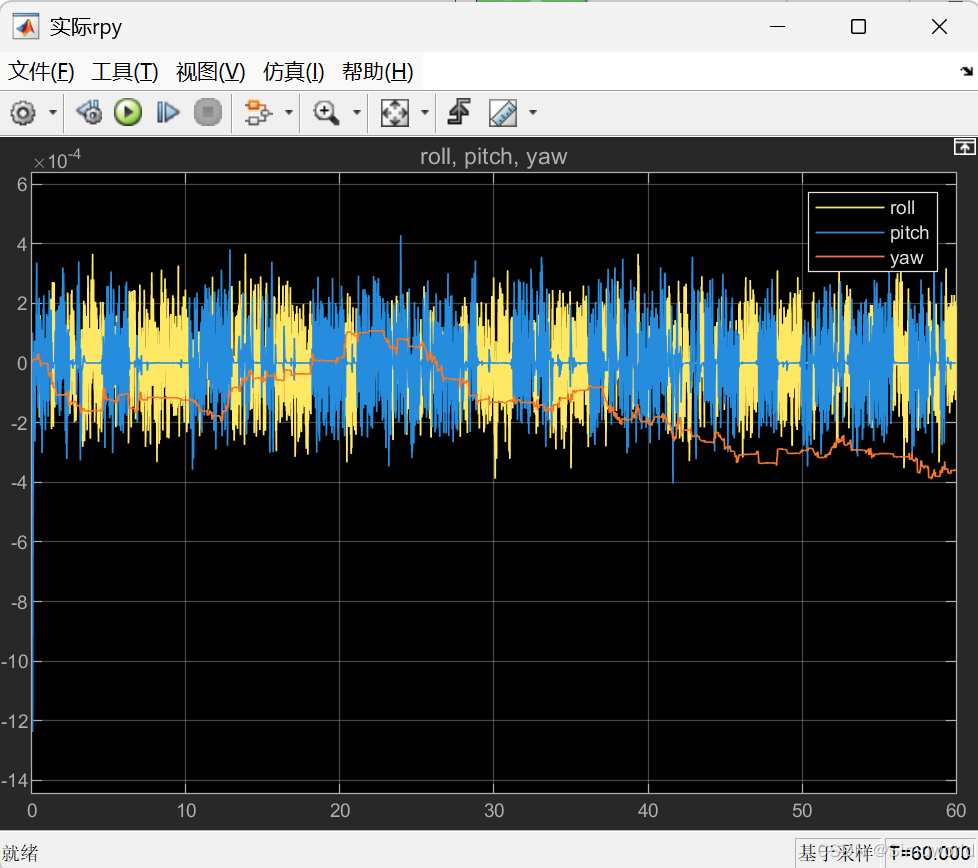
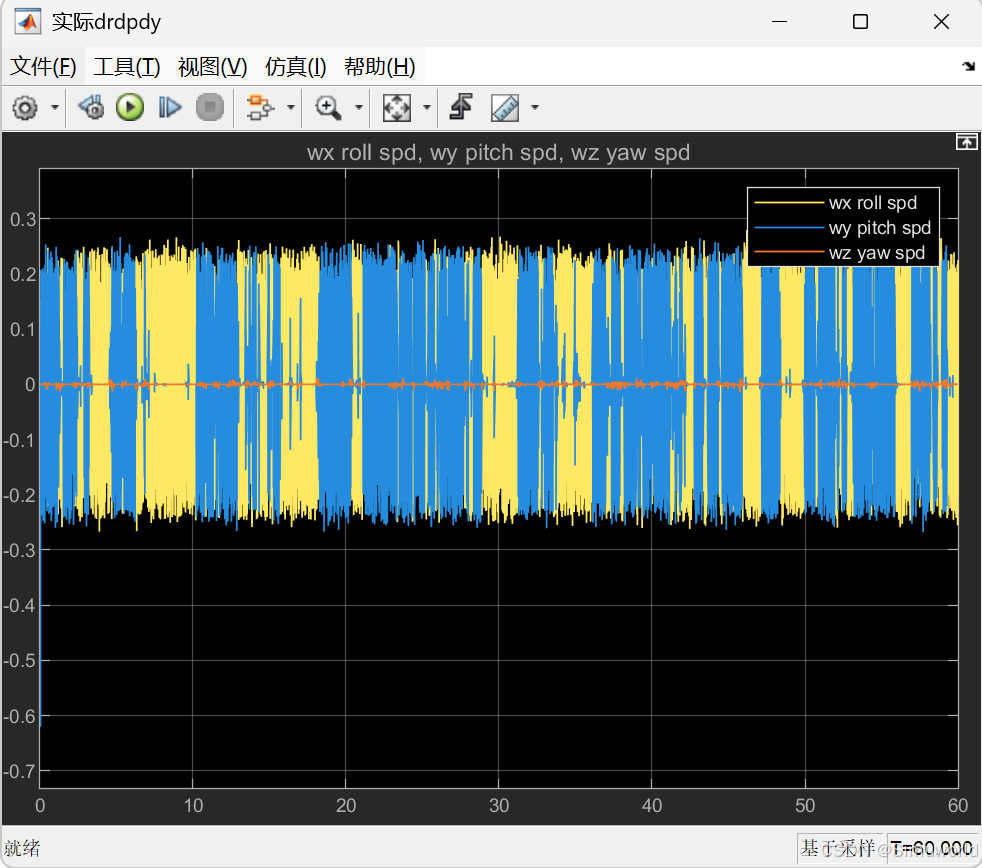
1.算法仿真效果
Matlab2024b仿真结果如下:

2.MATLAB程序
%旋转关节(RevoluteJoint)参数配置 =============%
% 旋转关节用于定义两个刚体之间的旋转自由度,此处仅配置Z轴旋转(Rz)的初始位置(Pos)
% 其他旋转轴(Rx/Ry)和移动轴(Px/Py/Pz)等未配置,说明模型中关节仅允许绕Z轴旋转
% 初始化RevoluteJoint结构体数组:先为第4个元素填充空值(占位)
% 结构体包含2个字段:Rz.Pos(Z轴旋转初始位置)、ID(关节标识,对应两个刚体的连接关系)
smiData.RevoluteJoint(4).Rz.Pos = 0.0;
smiData.RevoluteJoint(4).ID = '';
% 第1个旋转关节:定义基座与顺时针桨叶(1-2)的连接关节
smiData.RevoluteJoint(1).Rz.Pos = -89.999999999999986; % deg
smiData.RevoluteJoint(1).ID = '[base_fight_first2-3:-:55mm_paddle_clockwise - 1-2]';
% 第2个旋转关节:定义基座与顺时针桨叶(3-2)的连接关节
smiData.RevoluteJoint(2).Rz.Pos = -89.999999999999986; % deg
smiData.RevoluteJoint(2).ID = '[base_fight_first2-3:-:55mm_paddle_clockwise - 3-2]';
% 第3个旋转关节:定义基座与逆时针桨叶(2-2)的连接关节
smiData.RevoluteJoint(3).Rz.Pos = -89.999999999999986; % deg
smiData.RevoluteJoint(3).ID = '[base_fight_first2-3:-:55mm_paddle_counter_clock - 2-2]';
% 第4个旋转关节:定义基座与逆时针桨叶(4-2)的连接关节(补全初始化的空值)
smiData.RevoluteJoint(4).Rz.Pos = -89.999999999999986; % deg
smiData.RevoluteJoint(4).ID = '[base_fight_first2-3:-:55mm_paddle_counter_clock - 4-2]';
243.算法概述
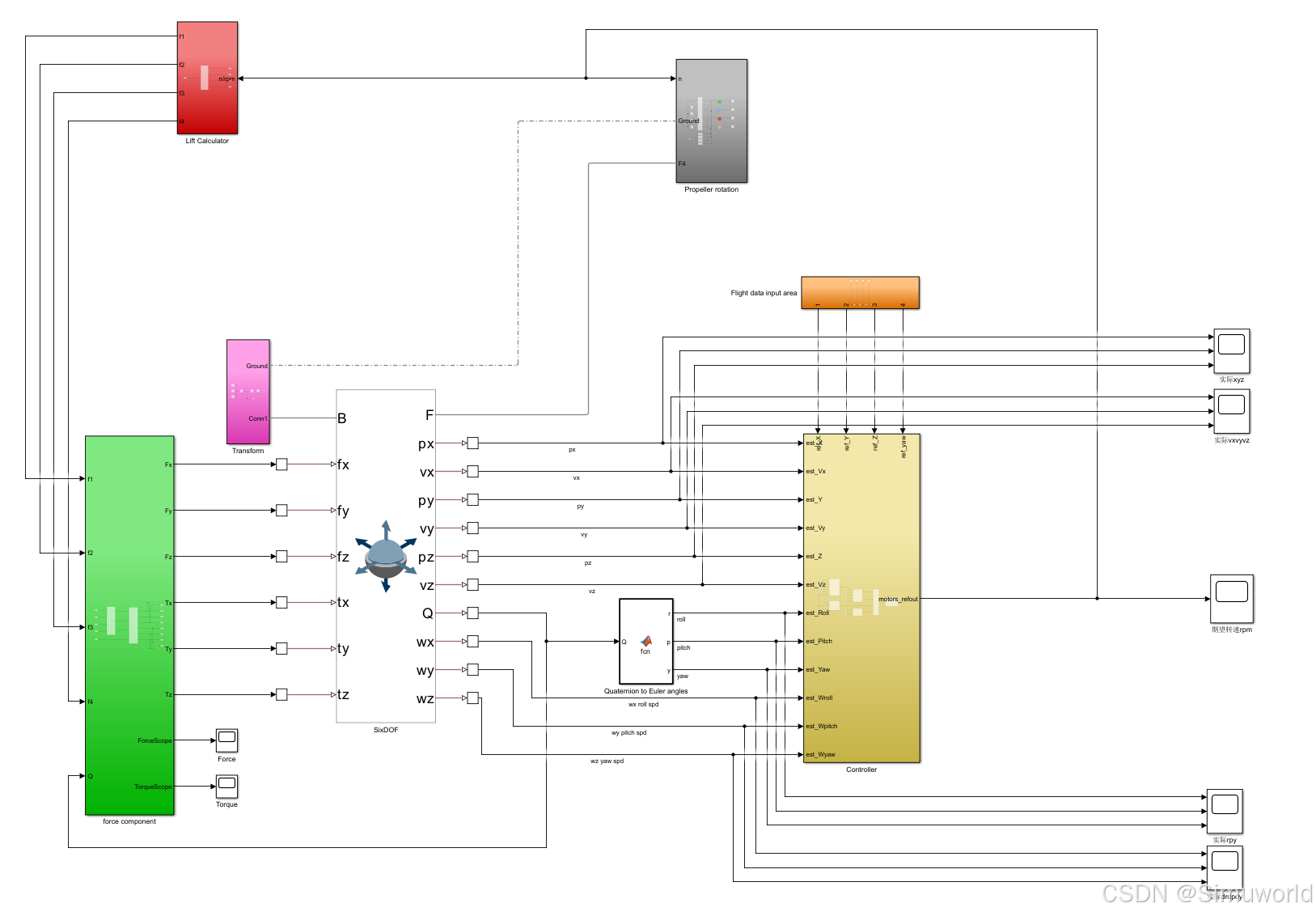
四旋翼无人机通过4个电机驱动螺旋桨产生升力,电机按“对角同向、邻角反向”布置(如图1):电机 1(前左)、3(后右)顺时针旋转,电机2(前右)、4(后左)逆时针旋转,抵消单电机旋转产生的反扭矩。其运动依赖升力差和力矩差实现6个自由度(3个位置:x/y/z;3个姿态:滚转φ/ 俯仰θ/偏航ψ)控制:
垂直运动(z 轴):4个电机升力之和变化(升力>重力时上升,反之下降);
滚转运动(φ 角):左右电机升力差产生滚转力矩(左电机升力增大、右电机减小→机身左倾);
俯仰运动(θ 角):前后电机升力差产生俯仰力矩(前电机升力增大、后电机减小→机身前倾);
偏航运动(ψ 角):反向电机阻力矩差产生偏航力矩(顺转电机阻力矩增大、反转电机减小→机身顺时针旋转);
水平运动(x/y 轴):通过滚转/俯仰改变升力在水平方向的分量(如前倾角θ→升力分解出x向分力,推动机身前进)。
控制目标是使无人机跟踪期望位置(xd,yd,zd)和期望姿态(φd,θd,ψd),核心矛盾是非线性强耦合(如 x 向运动依赖 θ 角,y 向运动依赖 φ 角)和外部扰动(风、负载变化)。PI 控制器通过 “比例项快速响应误差、积分项消除静差”,成为解决该问题的基础方案。
4.部分参考文献
[1]郝瑞阳,马文涛,陈希银.四旋翼飞控系统设计与仿真[J].福建电脑, 2024, 40(7):81-85.
5.程序内容,运行方法和源码获取
5.1 作品内容
matlab程序,Simulink模型
5.2 运行方法
1.在matlab的左侧的当前文件夹窗口;
2.运行para.m文件,再运行models.slx模型文件。
5.3 源码获取
step1.打开博客主页的左侧推广栏查看,或扫博客文章底部信息
step2.然后用电脑打开网页链接,输入文章标题搜索


















 507
507

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











