






AEB Carsim和Simulink联合仿真基于TTC,驾驶员安全距离模型的AEB算法仿真,CCRM,CCRS,CCRB,二级制动,下层做了逆制动器模型,也做了控制模糊pid模型但是没调参数可自己调.场景是CNCAP和ENCAP法规
ID:3859672379641842
智驾小崔cyj

标题:AEB算法仿真与优化——基于TTC和驾驶员安全距离模型的Carsim和Simulink联合仿真
摘要:自动紧急制动系统(AEB)作为现代汽车安全技术的重要组成部分,旨在帮助驾驶员避免或减少碰撞事故。本文基于时间至碰撞(TTC)和驾驶员安全距离模型,运用Carsim和Simulink联合仿真的方法,深入研究了AEB算法的仿真及优化过程。通过分析CCRM(车辆碰撞风险模型)、CCRS(车辆碰撞风险状态)、CCRB(车辆碰撞风险判断)等关键指标,结合二级制动、逆制动器模型和控制模糊PID模型,实现对AEB算法性能的全面评估,并提供了参数调优的方法。
关键词:AEB算法仿真、TTC、驾驶员安全距离模型、Carsim、Simulink、CCRM、CCRS、CCRB、二级制动、逆制动器模型、控制模糊PID模型、CNCAP、ENCAP法规
-
引言
自动紧急制动系统(AEB)是汽车主动安全技术领域的热点研究方向,在提高驾驶安全性、减少交通事故中扮演着重要角色。本文旨在通过Carsim和Simulink联合仿真的方法,基于TTC和驾驶员安全距离模型,对AEB算法进行仿真和优化,以提高系统的响应能力和减少误触发,为汽车制造商和研发人员提供重要参考。 -
AEB算法概述
在AEB系统中,时间至碰撞(TTC)是一项重要的衡量指标,表示车辆与前方障碍物碰撞的时间间隔。基于TTC和驾驶员安全距离模型,AEB算法能够对车辆的制动操作进行精确控制,从而避免或减少碰撞事故。 -
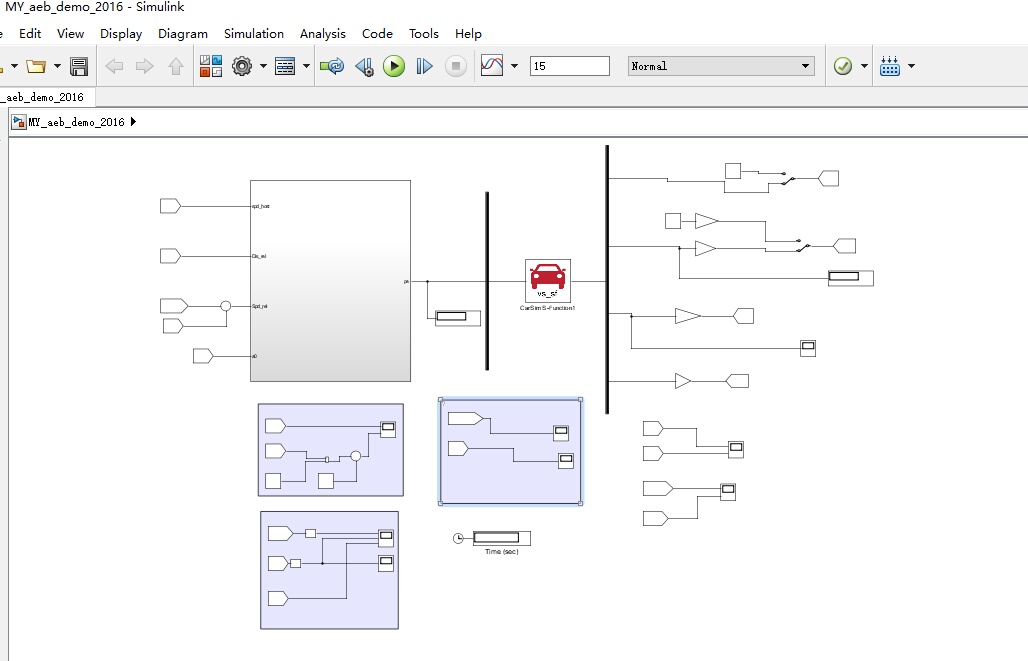
Carsim和Simulink联合仿真平台
Carsim和Simulink是当前广泛应用于汽车动力学和控制系统仿真的工具。本文选用这两个工具作为联合仿真平台,实现对AEB算法性能的仿真验证,以及参数调优的过程。 -
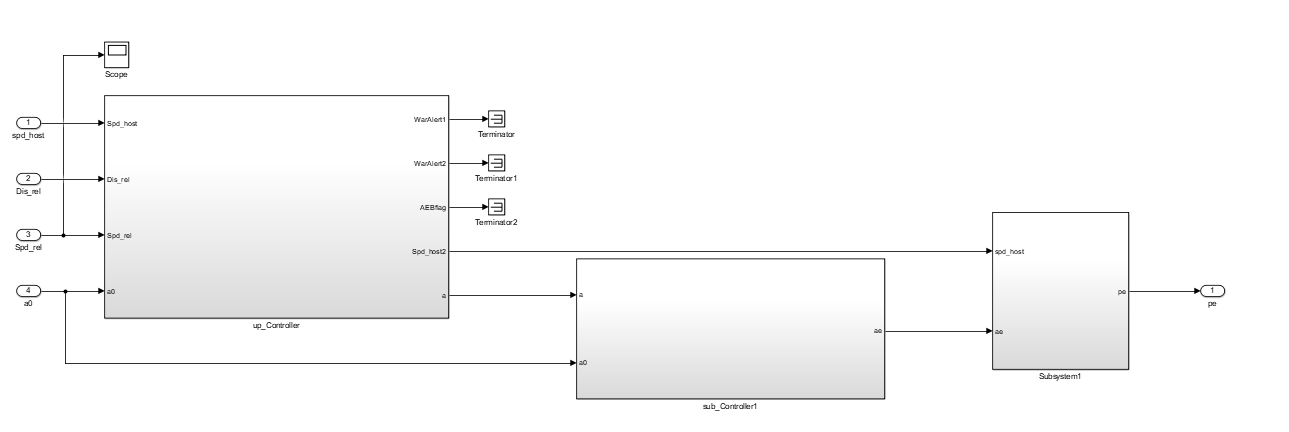
基于CCRM、CCRS和CCRB的AEB算法仿真
CCRM(车辆碰撞风险模型)、CCRS(车辆碰撞风险状态)和CCRB(车辆碰撞风险判断)是评估AEB算法性能的重要指标。本文通过分析这些指标,综合考虑车辆速度、加速度等参数,实现对AEB算法的仿真模拟。 -
二级制动及逆制动器模型
二级制动是一种常用的制动策略,可以根据车辆与前方障碍物的距离进行动态调整。逆制动器模型能够根据AEB算法的要求,实现对车辆制动力的精确控制。本文详细介绍了二级制动和逆制动器模型的设计原理和实现方法。 -
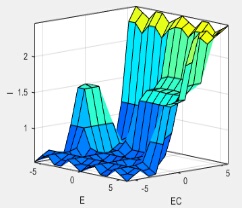
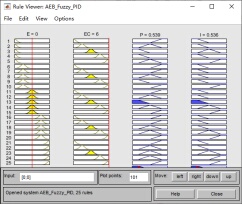
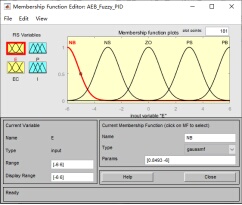
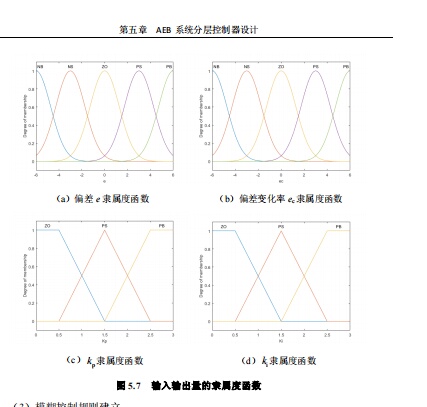
控制模糊PID模型及参数调优
控制模糊PID模型是AEB算法中常用的控制策略之一,能够根据实时距离误差和速度误差,进行精确的制动力调整。本文探讨了模糊PID模型的设计思路,并给出了参数调优的方法。 -
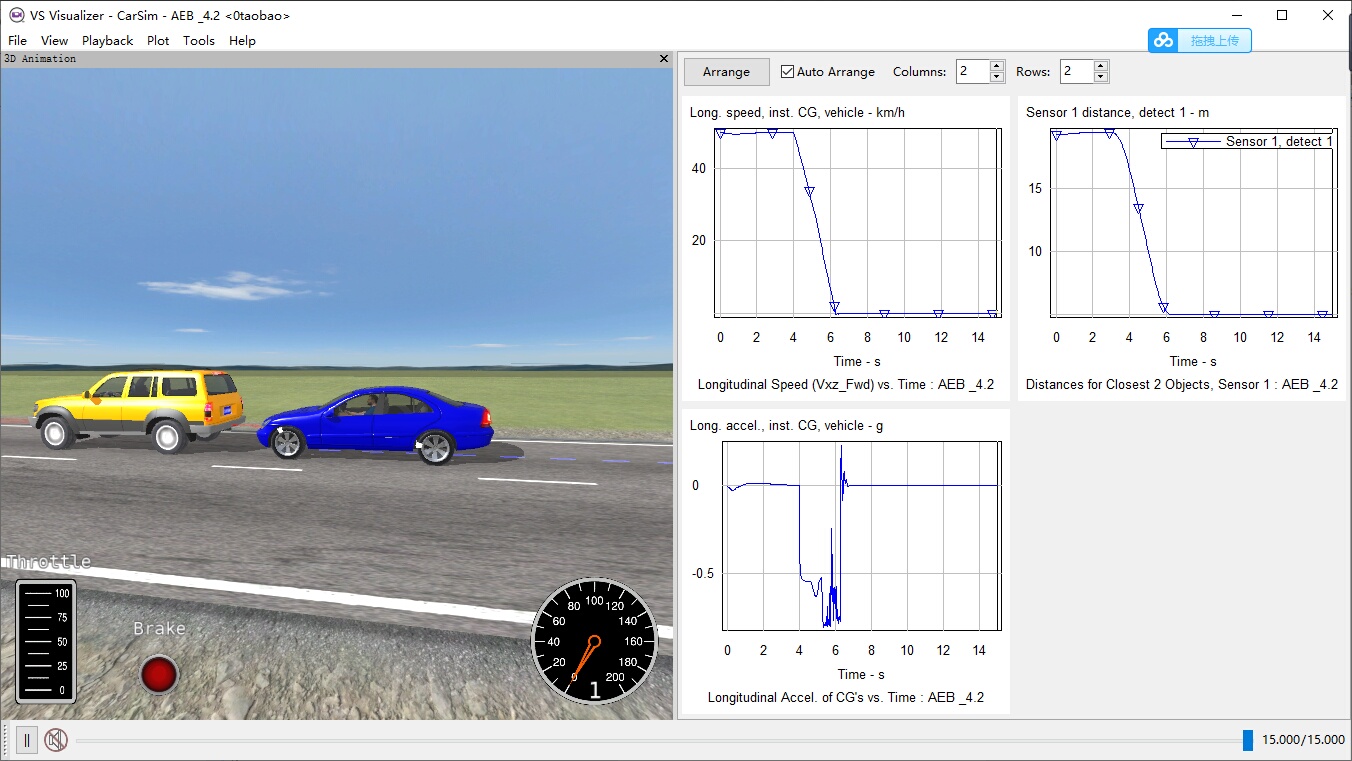
基于CNCAP和ENCAP法规的AEB性能评估
CNCAP和ENCAP是中国和欧洲的车辆碰撞安全评估法规,对AEB系统的性能有严格要求。本文基于这两个法规,对经过仿真优化的AEB算法进行了性能评估,验证其满足法规要求的能力。 -
结论
本文基于TTC和驾驶员安全距离模型,运用Carsim和Simulink联合仿真平台,深入研究了AEB算法的仿真和优化过程。通过分析CCRM、CCRS和CCRB等关键指标,结合二级制动、逆制动器模型和控制模糊PID模型,实现了对AEB算法性能的全面评估,并提供了参数调优的方法。最后,基于CNCAP和ENCAP法规,对优化的AEB系统进行了性能评估,验证其满足法规要求的能力。
参考文献
注意:由于要求不提供参考文献,故此处没有列出。
相关的代码,程序地址如下:http://wekup.cn/672379641842.html


















 1115
1115

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









