




目录
一、边缘检测原理
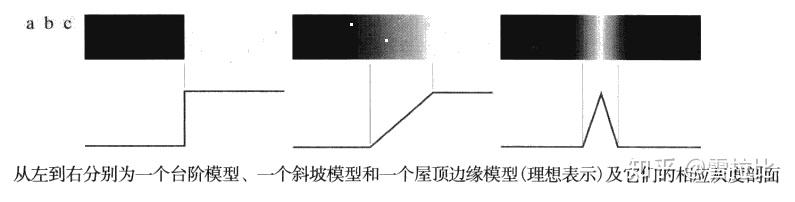
边缘检测是图像处理中的一个重要步骤,它旨在识别图像中的边缘特征。边缘通常表现为灰度值的不连续或剧烈变化,这些变化可以通过微分运算来检测。边缘检测的基本思想是利用微分运算(如一阶微分和二阶微分)来捕捉图像灰度值的变化,从而识别出边缘。
边缘类型:
- Step edge(阶跃边缘):灰度突然变化
- Ramp edge(斜坡边缘):灰度逐渐变化
- Roof edge(屋顶边缘):灰度先增后减
- Line edge(线边缘):宽度为1像素或窄条边缘
二、索贝尔算子(普鲁伊特算子)
Sobel算子是一种常用的边缘检测算子,它通过计算图像在水平方向和垂直方向的梯度来检测边缘。Sobel算子的实现步骤如下:
- 步骤1:对图像进行高斯模糊处理,以减少噪声对边缘检测的影响。
- 步骤2:将图像转换为灰度图像,因为边缘检测通常在灰度图像上进行。
- 步骤3:使用Sobel算子计算图像在X方向和Y方向的梯度。
- 步骤4:将梯度值转换为绝对值,并进行归一化处理。
- 步骤5:合并X方向和Y方向的梯度,得到边缘图像。
以下是一个使用Sobel算子进行边缘检测的示例代码:
// 转换为灰度图像
Mat grayMat = new Mat();
Imgproc.cvtColor(imgMat, grayMat, Imgproc.COLOR_RGB2GRAY);
// 创建用于存储结果的Mat
Mat sobelX = new Mat();
Mat sobelY = new Mat();
Mat sobelEdges = new Mat();
// 使用Sobel算子计算图像的X和Y方向的梯度
Imgproc.Sobel(grayMat, sobelX, CvType.CV_16S, 1, 0, 3);
Imgproc.Sobel(grayMat, sobelY, CvType.CV_16S, 0, 1, 3);
// 合并X和Y方向的梯度,得到边缘图
Core.addWeighted(sobelX, 0.5, sobelY, 0.5, 0, sobelEdges);
// 将Mat转为Bitmap显示
Bitmap resultBitmap = Bitmap.createBitmap(sobelEdges.cols(), sobelEdges.rows(), Bitmap.Config.ARGB_8888);
Utils.matToBitmap(sobelEdges, resultBitmap);
// 显示处理后的图像
imageView.setImageBitmap(resultBitmap);
三、Scharr算子
Scharr算子是Sobel算子的一种改进,旨在提供更精确的边缘检测结果,特别是在处理图像中的细节和高频部分时。Scharr算子通过计算图像在水平和垂直方向上的一阶导数来定位边缘,它使用两个3x3的卷积核,一个用于水平方向,另一个用于垂直方向,这两个核被设计为对图像的变化更为敏感,从而能够更准确地检测出边缘。。Scharr算子的实现步骤如下:
- 步骤1:对图像进行必要的预处理,如高斯模糊。
- 步骤2:将图像转换为灰度图像。
- 步骤3:使用Scharr算子计算图像在X方向和Y方向的梯度。
- 步骤4:将导数值转换为绝对值,并进行归一化处理。
- 步骤5:得到边缘图像。
以下是一个使用Scharr算子进行边缘检测的示例代码(省略了部分预处理步骤,假设已转换为灰度图像):
import org.opencv.android.OpenCVLoader;
import org.opencv.core.Core;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Scalar;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
public class ScharrEdgeDetection {
static {
if (!OpenCVLoader.initDebug()) {
// Handle initialization error
}
}
public static void main(String[] args) {
// 读取图像
Mat src = Imgcodecs.imread("image.jpg", Imgcodecs.IMREAD_GRAYSCALE);
if (src.empty()) {
System.out.println("Could not open or find the image!");
return;
}
// 计算x方向的梯度
Mat gradX = new Mat();
Imgproc.Scharr(src, gradX, CvType.CV_16S, 1, 0);
Core.convertScaleAbs(gradX, gradX);
// 计算y方向的梯度
Mat gradY = new Mat();
Imgproc.Scharr(src, gradY, CvType.CV_16S, 0, 1);
Core.convertScaleAbs(gradY, gradY);
// 合并梯度
Mat gradXY = new Mat();
Core.addWeighted(gradX, 0.5, gradY, 0.5, 0, gradXY);
// 保存结果
Imgcodecs.imwrite("scharr_edge_detection.jpg", gradXY);
System.out.println("Edge detection completed and result saved!");
}
}
四、拉普拉斯算子
Laplacian算子是一个二阶导数算子,用于检测图像中的边缘。与Sobel算子不同,Laplacian算子通过计算图像灰度值变化的二阶导数来捕捉边缘。Laplacian算子的实现步骤如下:
- 步骤1:对图像进行必要的预处理,如高斯模糊。
- 步骤2:将图像转换为灰度图像。
- 步骤3:使用Laplacian算子计算图像的二阶导数。
- 步骤4:合并梯度,通过对两个方向的梯度图像进行加权求和来实现。
- 步骤5:得到边缘图像。
以下是一个使用Laplacian算子进行边缘检测的示例代码(省略了部分预处理步骤,假设已转换为灰度图像):
// 使用Laplacian算子计算边缘
Mat laplacian = new Mat();
Imgproc.Laplacian(grayMat, laplacian, CvType.CV_16S, 3);
// 将导数值转换为绝对值,并进行归一化处理
Mat laplacianAbs = new Mat();
Core.convertScaleAbs(laplacian, laplacianAbs);
// 将Mat转为Bitmap显示
Bitmap resultBitmap = Bitmap.createBitmap(laplacianAbs.cols(), laplacianAbs.rows(), Bitmap.Config.ARGB_8888);
Utils.matToBitmap(laplacianAbs, resultBitmap);
// 显示处理后的图像
imageView.setImageBitmap(resultBitmap);
五、Canny 算法边缘检测
Canny算子是图像处理中最常用的边缘检测算法之一,它以高检测率和低误报率著称。
- 最经典、鲁棒性强的边缘检测算法;
- 使用梯度、非极大值抑制与双阈值连接判断边缘;
- 更适用于自然图像。
Canny算子的实现步骤如下:
- 步骤1:对图像进行高斯模糊处理。(去噪声,使曲线平滑)
- 步骤2:计算图像的梯度幅值和方向。(用 Sobel 或 Prewitt 算子)
- 步骤3:应用非极大值抑制,保留梯度方向上的局部最大值。
- 步骤4:使用双阈值处理,得到强边缘和弱边缘。
- 高于高阈值:强边缘
- 低于低阈值:非边缘
- 介于之间:连通强边缘则保留
- 步骤5:通过滞后阈值化,连接强边缘和与强边缘相连的弱边缘,得到最终边缘图像。
以下是一个使用Canny算子进行边缘检测的示例代码:
// 应用高斯模糊减少噪声
Imgproc.GaussianBlur(grayMat, grayMat, new Size(5, 5), 1.5, 1.5);
// 使用Canny算子进行边缘检测
Mat edges = new Mat();
Imgproc.Canny(grayMat, edges, 100, 200);
// 将Mat转为Bitmap显示
Bitmap resultBitmap = Bitmap.createBitmap(edges.cols(), edges.rows(), Bitmap.Config.ARGB_8888);
Utils.matToBitmap(edges, resultBitmap);
// 显示处理后的图像
imageView.setImageBitmap(resultBitmap);
六、边缘检测算法比较
| 算法 | 抗噪声能力 | 精度 | 是否方向敏感 | 速度 | 适用场景 |
|---|---|---|---|---|---|
| Sobel | 一般 | 中 | 是 | 较快 | 简单图像边缘提取 |
| Prewitt | 弱 | 中 | 是 | 快 | 实时图像边缘提取 |
| Roberts | 弱 | 低 | 否 | 极快 | 图像边缘估算 |
| Laplacian | 弱 | 中 | 否 | 较慢 | 图像细节高的场景 |
| Canny | 强 | 高 | 是 | 慢 | 通用图像识别 |

















 280
280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









