




基于多尺度的图像分析方法在计算机视觉和图像处理领域中得到了广泛应用。这些方法利用图像在不同尺度下的信息来提高图像分析任务的准确性和鲁棒性。下面主要介绍下多尺度分析在传统的图像处理算法和深度神经网络架构中的设计和应用。
目录
一、图像金字塔
图像金字塔是一种多分辨率图像处理技术,通过构建一系列不同分辨率的图像来表示原始图像。这种技术常用于图像压缩、特征提取、图像融合以及图像增强等领域。在Android OpenCV中,图像金字塔主要有两种类型:高斯金字塔和拉普拉斯金字塔。
其中高斯金字塔是通过高斯滤波和降采样操作逐步降低图像分辨率而得到的图像集合。每个级别的图像都是对其前一级图像进行高斯滤波后,再按照一定比例(通常是1/2)进行降采样得到的。这种处理方式使得图像在不同尺度上保持平滑,同时保留了图像的主要特征。
构建过程如下:
- 原始图像:作为金字塔的底层,即第0层。
- 高斯滤波:对原始图像应用高斯滤波器,以平滑图像并减少噪声。
- 降采样:将滤波后的图像按照一定比例进行降采样,得到下一层级的图像。
- 重复:对上一层级图像重复步骤2和步骤3,直到达到所需的金字塔层级数。
应用实例:
// 假设已经正确加载了OpenCV库,并且有一个ImageView用于显示图像
public void buildGaussianPyramid(Bitmap inputBitmap, ImageView imageView) {
// 将Bitmap转换为Mat对象
Mat inputMat = new Mat(inputBitmap.getHeight(), inputBitmap.getWidth(), CvType.CV_8UC3);
Utils.bitmapToMat(inputBitmap, inputMat);
// 创建高斯金字塔
Mat[] pyramid = new Mat[4]; // 假设构建4层金字塔
pyramid[0] = inputMat.clone();
for (int i = 1; i < pyramid.length; i++) {
// 计算下一层级的尺寸
Size size = new Size(pyramid[i-1].cols()/2, pyramid[i-1].rows()/2);
// 构建高斯金字塔的下一层级
Imgproc.pyrDown(pyramid[i-1], pyramid[i], size);
}
// 显示不同层级的图像(这里只显示最底层和最高层作为示例)
Bitmap outputBitmap0 = Bitmap.createBitmap(pyramid[0].cols(), pyramid[0].rows(), Bitmap.Config.ARGB_8888);
Bitmap outputBitmap3 = Bitmap.createBitmap(pyramid[pyramid.length-1].cols(), pyramid[pyramid.length-1].rows(), Bitmap.Config.ARGB_8888);
Utils.matToBitmap(pyramid[0], outputBitmap0);
Utils.matToBitmap(pyramid[pyramid.length-1], outputBitmap3);
// 假设有一个方法可以设置ImageView显示的Bitmap(这里简化为只显示最高层图像作为示例)
// imageView.setImageBitmap(outputBitmap0); // 显示最底层图像
imageView.setImageBitmap(outputBitmap3); // 显示最高层图像
// 释放资源
for (Mat mat : pyramid) {
if (mat != null) {
mat.release();
}
}
}普拉斯金字塔是一种基于高斯金字塔的图像多尺度表示方法,它在图像处理和计算机视觉任务中有着广泛的应用。以下是对拉普拉斯金字塔的构建方式、特征,以及与高斯金字塔相比的优势和劣势的详细解释:
拉普拉斯金字塔的构建方式
-
构建高斯金字塔:
- 从原始图像开始,依次生成每一层的高斯金字塔。
- 每层都是通过应用高斯滤波器后进行下采样(通常是将图像尺寸缩小一半)得到的。
-
构建拉普拉斯层:
- 对于每一层高斯金字塔,拉普拉斯层是通过以下步骤得到的:
- 从较高分辨率的图像生成较低分辨率的图像(即先下采样再高斯滤波)。
- 从较低分辨率的图像生成较高分辨率的图像(即先上采样再高斯滤波)。
- 计算两者的差值,这就是该层的拉普拉斯层。
- 对于每一层高斯金字塔,拉普拉斯层是通过以下步骤得到的:
拉普拉斯金字塔的特征
- 多尺度表示:拉普拉斯金字塔能够生成一系列不同尺度的图像,这些图像表示了图像在不同尺度下的细节信息。
- 可逆性:拉普拉斯金字塔的运算过程是可逆的,这意味着可以从拉普拉斯金字塔中重建出原始图像。
- 细节捕捉:每一层的拉普拉斯图像都捕捉了与上一层相比的细节变化,这对于图像增强、压缩等任务非常有用。
与高斯金字塔相比的优势
- 图像融合:拉普拉斯金字塔可以用于图像融合,将不同来源的图像在不同尺度上进行融合,以获得更好的融合效果。
- 图像增强:通过对拉普拉斯金字塔的高层进行增强,可以突出图像的细节信息,从而实现图像增强的目的。
- 图像压缩:拉普拉斯金字塔可以用于图像压缩,将图像分解为不同尺度的子图像,然后对每个子图像进行单独的压缩。这种方法可以在保证图像质量的前提下减少存储空间。
与高斯金字塔相比的劣势
- 信息损失:由于拉普拉斯金字塔是通过下采样和上采样操作得到的,这会导致图像中的一些高频细节信息丢失,从而可能影响图像的质量。
- 边界效应:在进行下采样和上采样操作时,图像的边界可能会出现模糊和失真的效应,这可能会影响到一些边缘检测和纹理分析任务。
二、图像直方图
概念
图像直方图是一个统计图表,用于展示图像中每个亮度值(或像素值)出现的频率。在灰度图像中,横轴通常表示像素强度(范围从0到255),纵轴表示每个强度值的像素数量。直方图能够直观地展示图像中不同像素值的分布情况,从而帮助我们分析图像的亮度、对比度和颜色特征。
构建方法
在OpenCV中,我们可以使用calcHist函数来计算图像的直方图。这个函数允许我们指定输入图像、要计算的通道、掩码(可选)、输出直方图、直方图的维度、每个维度的bin数以及每个维度的取值范围等参数。
- 输入图像:要计算直方图的图像,可以是灰度图像或彩色图像。
- 通道:指定要计算直方图的通道,例如灰度图像的单个通道或彩色图像的R、G、B通道。
- 掩码(可选):用于指定计算直方图的图像区域。
- 输出直方图:存储计算结果的矩阵。
- dims:直方图的维度,例如灰度直方图的维度为1,H-S二维直方图的维度为2。
- histSize:每个维度的bin数,例如灰度直方图通常有256个bin(对应0-255的像素值)。
- ranges:每个维度的取值范围,例如灰度图像的取值范围为[0, 255]。
应用
图像直方图在图像处理中有广泛的应用,包括但不限于以下几个方面:
- 对比度调整:通过观察直方图,我们可以了解图像的曝光情况和对比度。如果直方图集中在中间部分,可能表明对比度较低,我们可以通过直方图均衡化等方法来增强对比度。
- 阈值处理:在图像二值化等任务中,我们可以利用直方图来确定合适的阈值。例如,使用Otsu算法可以自动根据直方图确定最佳阈值。
- 图像分析:直方图还可以用于图像分割、目标检测等任务中,通过分析直方图的峰谷等特征,我们可以确定图像中的主色调或颜色分布是否均衡。
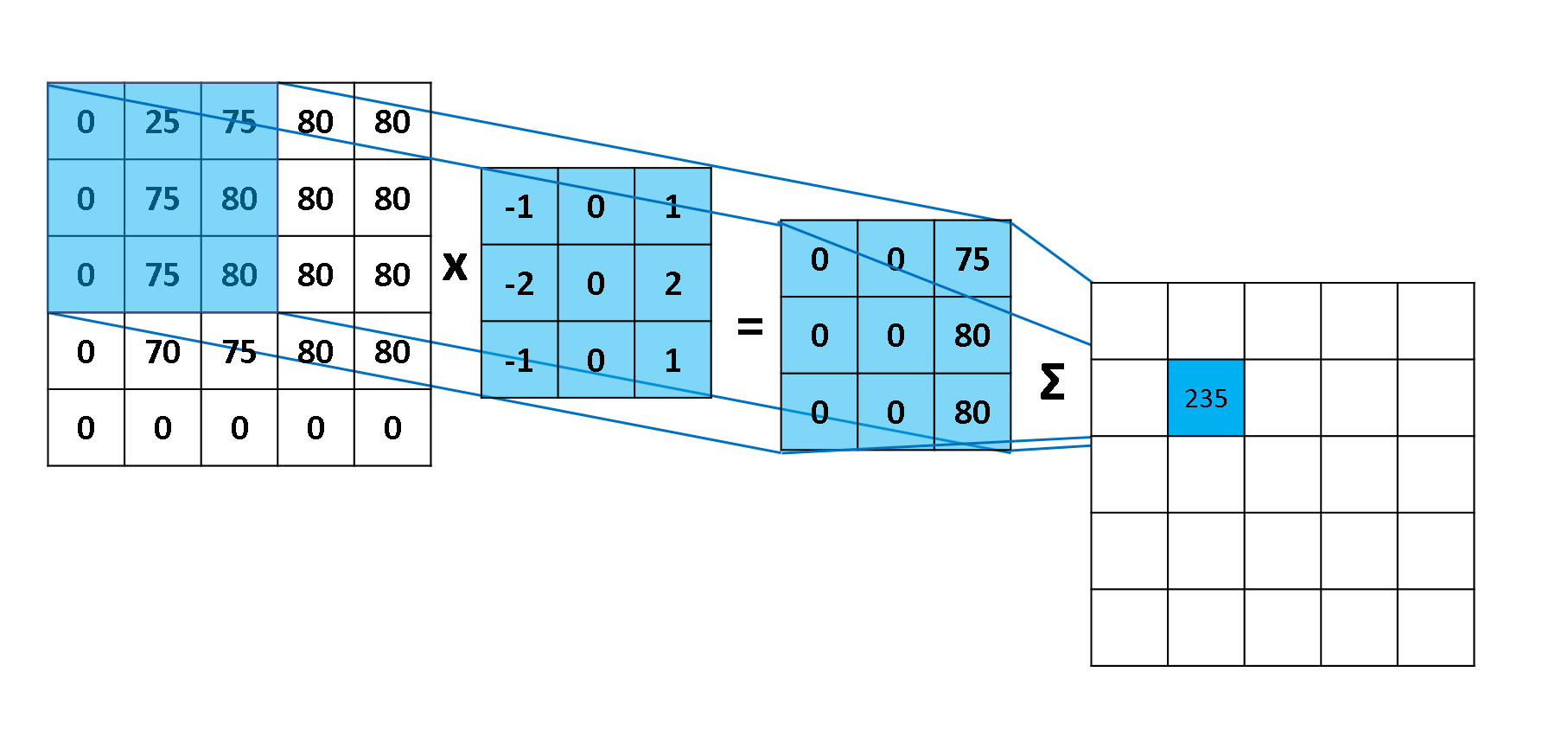
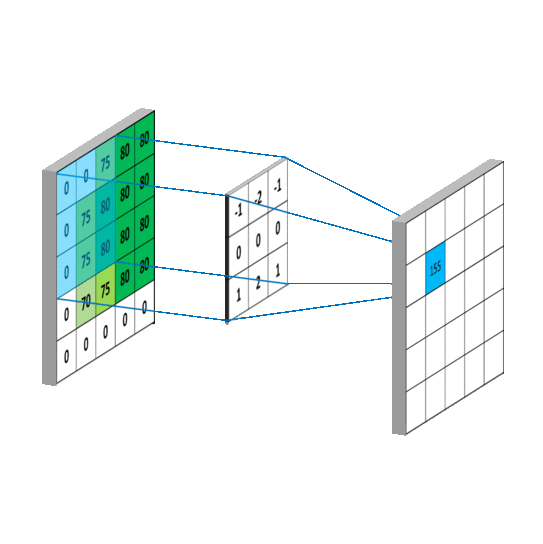
三、图像卷积
在图像处理领域,卷积是一种非常基础且强大的操作。它通过将一个小矩阵(称为卷积核或滤波器)滑动覆盖在图像上,对每个像素进行加权求和,从而实现图像的平滑、边缘检测、锐化、模糊等多种效果。卷积操作可以表示为数学公式:
g(x,y)=∑u=−kk∑v=−llf(x+u,y+v)⋅h(u,v)g(x,y) = \sum_{u=-k}^{k}\sum_{v=-l}^{l}f(x+u,y+v)\cdot h(u,v)g(x,y)=u=−k∑kv=−l∑lf(x+u,y+v)⋅h(u,v)
其中:f(x,y)是输入图像,h(u,v)是卷积核,g(x,y)是输出图像,u,v为卷积核内的相对坐标,通常卷积核大小为(2k+1)×(2l+1)。
在OpenCV中,实现卷积操作最常用的函数是cv::filter2D。其基本使用方法如下:
void filter2D(InputArray src,
OutputArray dst,
int ddepth,
InputArray kernel,
Point anchor=Point(-1,-1),
double delta=0,
int borderType=BORDER_DEFAULT);
参数说明:
src:输入图像。dst:输出图像。ddepth:输出图像的数据深度,-1表示与输入图像相同。kernel:卷积核矩阵。anchor:卷积核的锚点,默认为中心。delta:在卷积结果上添加的可选增量值。borderType:边界填充方式。
通过选择合适的卷积核,可以实现不同的图像处理效果。例如:
- 平均滤波(模糊):常用于平滑图像、降低噪声,适合对边缘细节要求不高的应用。卷积核示例为一个3×3的矩阵,所有元素均为1/9。
- 高斯滤波:根据高斯分布进行权重分配,比简单平均滤波更能保留图像细节,常用于降噪和平滑处理。
- 边缘检测卷积核:能突出图像中灰度变化较大的区域,如Sobel算子、Prewitt算子或Laplacian算子。
- 锐化滤波:用于增强图像细节,卷积核示例为一个3×3的矩阵,中心元素为5,其余元素为-1。
应用
在Android OpenCV中,图像卷积广泛应用于各种图像处理任务中,包括但不限于:
- 图像平滑与降噪:通过选择合适的卷积核(如高斯核),可以有效平滑图像并降低噪声。
- 边缘检测:利用边缘检测卷积核(如Sobel算子),可以突出图像中的边缘信息,为后续的图像分割、特征提取等任务提供基础。
- 图像锐化:通过锐化滤波卷积核,可以增强图像中的细节信息,使图像更加清晰。
- 特征提取:在某些情况下,可以利用卷积操作提取图像中的特定特征,如纹理特征、形状特征等。
实例
// 假设已经正确加载了OpenCV库,并且有一个ImageView用于显示图像
public void applyConvolution(Bitmap inputBitmap, ImageView imageView, Mat kernel) {
// 将Bitmap转换为Mat对象
Mat inputMat = new Mat(inputBitmap.getHeight(), inputBitmap.getWidth(), CvType.CV_8UC3);
Utils.bitmapToMat(inputBitmap, inputMat);
// 创建输出Mat对象
Mat outputMat = new Mat();
// 应用卷积操作
Imgproc.filter2D(inputMat, outputMat, -1, kernel, new Point(-1, -1));
// 将Mat对象转换为Bitmap并显示
Bitmap outputBitmap = Bitmap.createBitmap(outputMat.cols(), outputMat.rows(), Bitmap.Config.ARGB_8888);
Utils.matToBitmap(outputMat, outputBitmap);
imageView.setImageBitmap(outputBitmap);
// 释放资源
inputMat.release();
outputMat.release();
}
// 示例:使用3x3锐化卷积核
Mat sharpenKernel = new Mat(3, 3, CvType.CV_32F);
sharpenKernel.put(0, 0, new Scalar(-1, -1, -1));
sharpenKernel.put(0, 1, new Scalar(-1, 5, -1));
sharpenKernel.put(0, 2, new Scalar(-1, -1, -1));
// 调用applyConvolution方法并传入锐化卷积核
// applyConvolution(inputBitmap, imageView, sharpenKernel);四、椒盐噪声
概念
椒盐噪声(Salt and Pepper Noise)是图像中常见的一种噪声类型,它表现为图像上随机出现的黑色或白色像素点。这些像素点可能是由于图像传感器故障、数据传输错误或图像切割等原因造成的。椒盐噪声由两种噪声组成:盐噪声(Salt Noise,表现为白色像素点)和胡椒噪声(Pepper Noise,表现为黑色像素点)。
特性
- 离散性:椒盐噪声是离散分布的,它会使部分像素值变成最亮(白色)或最暗(黑色)。
- 极端性:与高斯噪声等连续分布的噪声相比,椒盐噪声更为极端,其幅度大小变化很大。
- 统计特性:椒盐噪声的统计特性与高斯噪声不同,其随机程度极不均匀。
应用
椒盐噪声在图像处理中是一个重要的研究对象,因为它对图像质量有很大的影响。在图像采集、传输和处理过程中,椒盐噪声是不可避免的。因此,研究椒盐噪声的去除方法对于提高图像质量具有重要意义。同时,椒盐噪声也是图像增强、图像恢复等领域中的一个重要课题。
实例
import org.opencv.android.Utils;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Scalar;
import org.opencv.imgproc.Imgproc;
import android.graphics.Bitmap;
import android.widget.ImageView;
public class NoiseRemoval {
// 加载OpenCV库后,可以通过此方法去除图像中的椒盐噪声
public static void removeSaltAndPepperNoise(Bitmap inputBitmap, ImageView imageView) {
// 将Bitmap转换为Mat对象
Mat inputMat = new Mat(inputBitmap.getHeight(), inputBitmap.getWidth(), CvType.CV_8UC3);
Utils.bitmapToMat(inputBitmap, inputMat);
// 创建输出Mat对象
Mat outputMat = new Mat();
// 应用中值滤波去除椒盐噪声
Imgproc.medianBlur(inputMat, outputMat, 5); // 5x5的滤波器大小,可以根据需要调整
// 将Mat对象转换为Bitmap并显示
Bitmap outputBitmap = Bitmap.createBitmap(outputMat.cols(), outputMat.rows(), Bitmap.Config.ARGB_8888);
Utils.matToBitmap(outputMat, outputBitmap);
imageView.setImageBitmap(outputBitmap);
// 释放资源
inputMat.release();
outputMat.release();
}
// 示例:向图像中添加椒盐噪声(用于测试去噪效果)
public static Mat addSaltAndPepperNoise(Mat inputMat, double saltProb, double pepperProb) {
Mat outputMat = inputMat.clone();
int numSalt = (int) Math.ceil(saltProb * inputMat.total() * 1.0);
int numPepper = (int) Math.ceil(pepperProb * inputMat.total() * 1.0);
List<Point> saltPoints = new ArrayList<>(numSalt);
List<Point> pepperPoints = new ArrayList<>(numPepper);
Random rand = new Random();
// 生成盐噪声点
while (saltPoints.size() < numSalt) {
Point p = new Point(rand.nextInt(inputMat.cols()), rand.nextInt(inputMat.rows()));
if (!saltPoints.contains(p)) {
saltPoints.add(p);
}
}
// 生成胡椒噪声点
while (pepperPoints.size() < numPepper) {
Point p = new Point(rand.nextInt(inputMat.cols()), rand.nextInt(inputMat.rows()));
if (!pepperPoints.contains(p)) {
pepperPoints.add(p);
}
}
// 将噪声点添加到输出图像中
for (Point p : saltPoints) {
outputMat.put(p.x, p.y, new Scalar(255, 255, 255)); // 盐噪声为白色
}
for (Point p : pepperPoints) {
outputMat.put(p.x, p.y, new Scalar(0, 0, 0)); // 胡椒噪声为黑色
}
return outputMat;
}
}
// 使用示例
// Bitmap inputBitmap = ...; // 加载或获取你的图像Bitmap
// ImageView imageView = ...; // 获取你的ImageView对象
// Mat noisyMat = NoiseRemoval.addSaltAndPepperNoise(inputMat, 0.02, 0.02); // 向图像中添加椒盐噪声
// NoiseRemoval.removeSaltAndPepperNoise(noisyMat.bitmapRepresentation(), imageView); // 注意:这里需要一个将Mat转换为Bitmap的方法,或者直接处理Bitmap对象(上述代码已处理)
// 注意:上述代码中的addSaltAndPepperNoise方法返回的是Mat对象,而不是Bitmap,因此在实际使用时需要进行适当的转换或处理。为了简化示例,这里省略了转换步骤。在实际应用中,可以直接对Bitmap对象进行处理,或者将Mat对象转换为Bitmap后再进行处理。
五、高斯噪声
概念
高斯噪声是指其概率密度函数服从高斯分布(即正态分布)的一类噪声。常见的高斯噪声包括起伏噪声、宇宙噪声、热噪声和散粒噪声等。这类噪声主要来源于电子电路噪声和低照明度或高温带来的传感器噪声。
特性
- 高斯噪声出现在图像中的所有位置,而不仅仅是随机出现在某些位置。
- 其概率密度函数以均值μ为中心,标准差σ描述数据分布的离散程度。σ越大,数据分布越分散;σ越小,数据分布越集中。
应用
- 在图像处理中,高斯噪声是常见的噪声模型之一。
- 高斯滤波是一种用于消除高斯噪声的线性平滑滤波方法。
实例
import org.opencv.android.Utils;
import org.opencv.core.Core;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.MatOfDouble;
import org.opencv.core.Scalar;
import org.opencv.core.Size;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
public class GaussianNoiseRemoval {
static {
// Load OpenCV library
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
}
public static void main(String[] args) {
// Load the image
Mat src = Imgcodecs.imread("path_to_your_image.jpg", Imgcodecs.IMREAD_GRAYSCALE);
if (src.empty()) {
System.out.println("Could not open or find the image!");
return;
}
// Add Gaussian noise to the image (for simulation purposes)
Mat noise = new Mat(src.size(), src.type(), Scalar.all(0));
Core.randn(noise, new Scalar(0), new Scalar(25)); // Adjust the variance as needed
Core.add(src, noise, src);
// Apply Gaussian Blur to remove the noise
Mat dst = new Mat();
Imgproc.GaussianBlur(src, dst, new Size(5, 5), 0); // Adjust the kernel size and sigma as needed
// Save the result
Imgcodecs.imwrite("path_to_save_result.jpg", dst);
// Release the matrices
src.release();
noise.release();
dst.release();
}
}
六、均值滤波
概念
均值滤波,也称为线性滤波,是一种图像处理技术,用于去除图像中的噪声和增强图像的平滑度。其采用的主要方法为邻域平均法,即对待处理的当前像素点,选择一个模板(该模板由其近邻的若干像素组成),求模板中所有像素的均值,再把该均值赋予当前像素点,作为处理后图像在该点上的灰度值。
详解
从频率域观点来看,均值滤波是一种低通滤波器,高频信号将会被去掉,因此可以帮助消除图像尖锐噪声,实现图像平滑、模糊等功能。从均值滤波的定义上看,滤波操作也是进行图像卷积运算。
在OpenCV中,均值滤波可以通过Imgproc.blur()函数实现。该函数使用指定大小的内核对图像进行卷积运算,将每个像素的值替换为其周围像素的平均值。其参数包括:
src:待均值滤波的图像,图像的数据类型必须是CV_8U、CV_16U、CV_16S、CV_32F和CV_64F这五种数据类型之一。dst:均值滤波后的图像,与输入图像具有相同的尺寸和数据类型。ksize:卷积核尺寸,是一个正方形。anchor:内核的基准点(锚点),其默认值为(-1,-1)代表内核基准点位于kernel的中心位置。borderType:像素外推法选择标志。
应用
均值滤波广泛应用于图像预处理、图像增强和图像分析等领域。在移动端图像处理中,均值滤波可以用于图像降噪和平滑,提高图像质量,从而改善移动端上的图像处理效果。例如,在人脸识别和目标检测等应用中,通过平滑图像,可以去除图像中的噪声和细节,从而提高这些应用的准确性。
实例
import org.opencv.android.Utils;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Scalar;
import org.opencv.core.Size;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
public class MeanFilterExample {
static {
// 加载OpenCV库
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
}
public static void main(String[] args) {
// 读取图像
Mat src = Imgcodecs.imread("path/to/your/image.jpg");
if (src.empty()) {
System.out.println("Could not open or find the image!");
return;
}
// 创建目标图像
Mat dst = new Mat();
// 应用均值滤波
Imgproc.blur(src, dst, new Size(5, 5));
// 保存结果图像
Imgcodecs.imwrite("path/to/your/filtered_image.jpg", dst);
// 释放资源
src.release();
dst.release();
}
}
七、方框滤波
概念
方框滤波是所有滤波器中最简单的一种滤波方式。每一个输出像素的值是内核邻域像素值的平均值。这里使用的窗口函数是一个长宽分别为Kwidth和Kheight的矩形窗口,在此区域内邻域中像素值叠加求平均即可求出位于窗口中心点像素的像素值。
详解
方框滤波的核心思想是线性邻域滤波,即用不同的权重去结合一个小邻域内的像素,以得到应有的处理效果。在线性滤波中,输出像素值g(i,j)是输入像素值f(i+k,j+l)的加权和,其中加权和称之为“核”,滤波器的加权系数即滤波器的“滤波系数”。
在OpenCV中,方框滤波函数boxFilter的参数包括:
- 输入图像
src - 输出图像
dst - 输出图像的数据类型(深度)
ddepth,通常使用-1表示使用原有的图像深度 - 卷积核尺寸
ksize - 内核的基准点(锚点)
anchor,默认值(-1,-1)表示锚点在核的中心 - 是否将卷积核进行归一化的标志
normalize,默认为true,表示进行归一化 - 像素外推法选择标志
borderType,默认值为BORDER_DEFAULT
当normalize为true时,方框滤波就变成了均值滤波,即输出图像的每一个像素是核窗口内输入图像对应像素的像素平均值(所有像素加权系数相等)。
应用
方框滤波在图像处理中有广泛的应用,主要用于图像的平滑处理。通过调整卷积核的大小和是否进行归一化处理,可以得到不同的滤波效果。例如,在去除图像噪声的同时,可以保留图像的更多细节信息。
实例
import org.opencv.android.Utils;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Point;
import org.opencv.core.Size;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
public class BoxFilterExample {
public static void main(String[] args) {
// 加载图像
Mat src = Imgcodecs.imread("path/to/your/image.jpg");
if (src.empty()) {
System.out.println("Could not open or find the image!");
return;
}
// 创建输出图像
Mat dst = new Mat();
// 应用方框滤波
Imgproc.boxFilter(src, dst, -1, new Size(9, 9), new Point(-1, -1), true);
// 保存结果图像
Imgcodecs.imwrite("path/to/your/output_image.jpg", dst);
// 释放资源
src.release();
dst.release();
}
}
八、高斯滤波
概念
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。通俗地讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波利用高斯核的一个2维的卷积算子,用于图像模糊化(去除细节和噪声)。
详解
高斯滤波的主要特点是使用高斯函数(即正态分布函数)作为滤波核,对图像进行平滑处理,从而减少图像中的噪声并平滑图像细节。与均值滤波相比,高斯滤波能够更好地保留图像中的边缘信息,同时去除高频噪声。
高斯滤波的核心是高斯函数,它描述了信号的权重分布。具体来说,高斯滤波通过对图像进行加权平均处理,给图像每个像素周围的邻域像素赋予不同的权重,其中距离中心像素越远的像素,权重越小。
高斯滤波器的效果由其标准差σ和滤波窗口的大小决定。窗口的大小通常是2n+1,其中n为窗口的半径,标准差σ控制滤波器的平滑程度。标准差越大,高斯滤波器的平滑效果越强,去噪能力越好,但会导致更多的细节丧失。小标准差可以保留更多的图像细节,但对噪声的抑制较弱。
应用
高斯滤波具有广泛的应用,尤其是在图像处理领域:
- 图像去噪:高斯滤波被广泛应用于去噪,尤其是在图像中存在高斯噪声时。通过适当的高斯滤波,可以有效去除噪声,平滑图像。
- 图像模糊:高斯滤波常用于图像模糊效果的实现,尤其是在图像平滑、特效、艺术处理等方面。
- 边缘检测的预处理:在进行边缘检测(如Sobel、Canny等算法)之前,通常会应用高斯滤波进行图像平滑,去除噪声,提高边缘检测的精度和稳定性。
- 图像分割和特征提取:高斯滤波用于减少图像中的噪声,使得图像分割和特征提取的算法能够更稳定和准确地工作。
实例
import org.opencv.android.Utils;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Size;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
public class GaussianBlurExample {
static {
// 加载OpenCV库
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
}
public static void main(String[] args) {
// 读取图像
Mat src = Imgcodecs.imread("path/to/your/image.jpg", Imgcodecs.IMREAD_COLOR);
if (src.empty()) {
System.out.println("无法加载图像");
return;
}
// 创建目标图像
Mat dst = new Mat();
// 设置高斯滤波参数
Size ksize = new Size(5, 5); // 滤波窗口大小
double sigmaX = 0; // 标准差,0表示根据窗口大小自动计算
// 应用高斯滤波
Imgproc.GaussianBlur(src, dst, ksize, sigmaX);
// 保存结果图像
Imgcodecs.imwrite("path/to/your/result_image.jpg", dst);
// 释放资源
src.release();
dst.release();
}
}
九、双边滤波
概念
双边滤波(Bilateral Filter)是一种非线性的滤波方法,它结合了图像的空间邻近度和像素值相似度进行处理。双边滤波在滤除噪声、平滑图像的同时,能够较好地保留图像的边缘细节。
详解
双边滤波采用了两个高斯滤波的结合:一个负责计算空间邻近度的权值,即常用的高斯滤波器原理;另一个负责计算像素值相似度的权值。在两个高斯滤波的同时作用下,形成双边滤波。双边滤波的基本思想是将高斯滤波(空间邻近)的原理中,通过各个点到中心点的空间邻近度计算的各个权值进行优化,将其优化为空间邻近度计算的权值和像素值相似度计算的权值的乘积,优化后的权值再与图像作卷积运算,从而达到保边去噪的效果。
应用
双边滤波在图像处理中有广泛的应用,特别是在需要保留边缘信息的场景中。它常用于图像模糊、去噪和解决因抖动引起的图像问题。在Android OpenCV中,双边滤波可以用于图像预处理、图像增强等领域。
实例
import org.opencv.android.Utils;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Scalar;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
import android.graphics.Bitmap;
import android.os.Bundle;
import androidx.appcompat.app.AppCompatActivity;
public class BilateralFilterActivity extends AppCompatActivity {
static {
// 加载OpenCV库
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
}
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
// 读取图像
Mat src = Imgcodecs.imread("/path/to/your/image.jpg");
if (src.empty()) {
// 图像加载失败处理
return;
}
// 目标图像
Mat dst = new Mat();
// 双边滤波参数
int d = 25; // 滤波过程中每个像素邻域的直径
double sigmaColor = 100.0; // 颜色空间滤波器的sigma值
double sigmaSpace = 100.0; // 坐标空间中滤波器的sigma值
// 执行双边滤波
Imgproc.bilateralFilter(src, dst, d, sigmaColor, sigmaSpace);
// 显示或保存处理后的图像
// ...
}
}
十、常用滤波方式分析
异同点
-
相同点:
- 这四种滤波方式都是用于平滑图像和去除噪声的方法。
- 它们都可以通过卷积操作来实现。
-
不同点:
- 均值滤波和方框滤波是线性滤波方法,而高斯滤波和双边滤波虽然也基于卷积操作,但它们的权重分配方式不同。
- 均值滤波和方框滤波在去除噪声的同时会破坏图像的细节部分,而高斯滤波和双边滤波则能够更好地保留图像的边缘和细节。
- 双边滤波是非线性滤波方法,它在滤波过程中同时考虑了空域信息和灰度相似性,这使得它在图像去噪和细节增强方面具有独特的优势。
应用场景
-
均值滤波:
- 适用于对图像进行简单的平滑处理或去除轻微噪声的场景。
- 由于其操作简单、计算速度快,因此常用于图像预处理阶段。
-
方框滤波:
- 当需要对图像进行积分特性计算或进行其他自定义滤波处理时,可以使用方框滤波。
- 通过调整normalize参数,方框滤波可以灵活地切换为均值滤波或其他类型的线性滤波。
-
高斯滤波:
- 适用于消除高斯噪声的场景,如相机拍摄过程中产生的噪声。
- 高斯滤波也常用于图像减噪、图像平滑等处理过程中。
-
双边滤波:
- 适用于需要保留图像边缘信息的同时去除噪声的场景。
- 双边滤波常用于图像细节增强、图像去噪等高级图像处理任务中。
优势与局限性
-
均值滤波:
- 优势:操作简单、计算速度快。
- 局限性:会破坏图像的细节部分,使图像变得更加模糊。
-
方框滤波:
- 优势:灵活性强,可以通过设置normalize参数来控制滤波效果。
- 局限性:与均值滤波类似,也会在去除噪声的同时破坏图像的细节部分。
-
高斯滤波:
- 优势:能够很好地保留图像的边缘和细节,同时去除噪声。
- 局限性:对于非高斯噪声的去除效果可能不如其他方法。
-
双边滤波:
- 优势:能够在去除噪声的同时保留图像的边缘信息。
- 局限性:计算复杂度较高,处理速度相对较慢。
综上所述,这四种滤波方式在Android OpenCV中各有其独特的应用场景和优势。在选择滤波方式时,需要根据具体的图像处理需求和图像特点进行权衡和选择。

















 4904
4904

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









