图片速览 DCN K-means-friendly Spaces: Simultaneous Deep Learning and Clustering
 深度聚类网络的交替优化方法,
深度聚类网络的交替优化方法,
最新推荐文章于 2024-11-15 19:15:27 发布





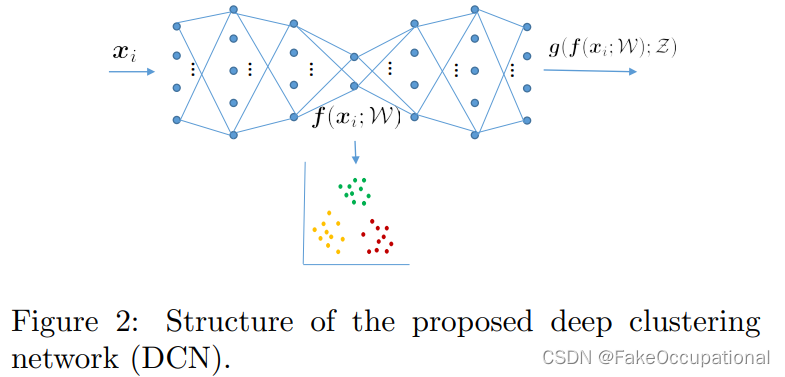
 该文提出一种结合深度学习和聚类的算法,通过交替更新网络权重和样本分配,优化聚类效果。在固定网络参数后,更新样本分配向量,进而根据新分配结果调整聚类中心。文章也探讨了优化过程中的凸性问题,并提供了实现代码参考。
深度聚类网络的交替优化方法,
该文提出一种结合深度学习和聚类的算法,通过交替更新网络权重和样本分配,优化聚类效果。在固定网络参数后,更新样本分配向量,进而根据新分配结果调整聚类中心。文章也探讨了优化过程中的凸性问题,并提供了实现代码参考。
该文提出一种结合深度学习和聚类的算法,通过交替更新网络权重和样本分配,优化聚类效果。在固定网络参数后,更新样本分配向量,进而根据新分配结果调整聚类中心。文章也探讨了优化过程中的凸性问题,并提供了实现代码参考。
深度聚类网络的交替优化方法,
该文提出一种结合深度学习和聚类的算法,通过交替更新网络权重和样本分配,优化聚类效果。在固定网络参数后,更新样本分配向量,进而根据新分配结果调整聚类中心。文章也探讨了优化过程中的凸性问题,并提供了实现代码参考。
 1096
960
4080
1万+
8044
1096
960
4080
1万+
8044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言