









KEIL中有时会出现汉字需要两次删除才能删掉,如果只删除一次就在输入其他字符就会导致乱码,这是因为部分编码方式的差异导致的,比如ANSI(ANSI是一种字符代码,为使计算机支持更多语言,通常使用 0x00~0x7f 范围的1 个字节来表示 1 个英文字符。超出此范围的使用0x80~0xFFFF来编码,即扩展的ASCII编码。)
汉字在此编码模式下一般需要占用两个字节,而删除键一次只能删除一个字节,因此导致了乱码的产生。
在KEIL中,我们可以通过修改编辑器编码模式为“GB2312”来解决这个问题:
1.打开 配置(configration)
2.按图示操作:
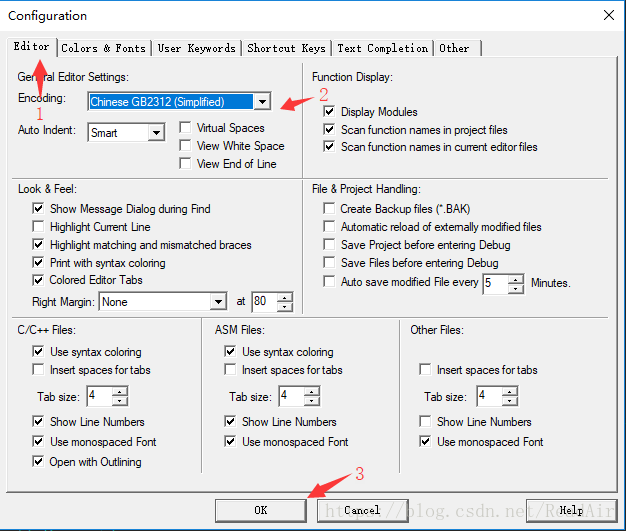
3. OK

















 5678
5678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









