




摘 要
齿轮是轮式机械部件,其通过齿的啮合传递扭矩。齿轮由其余齿形机械部件(如另一个齿蜗,齿条,杆轮)驱动,改动目的并改变运动形式。因为齿轮的普遍应用在我们生活中,不同情况差别很大,不同的形态和更多的几何参数,这将直接引出制作和装置中的某些谬误,这将影响使用质量。对于符合齿轮的各种数据,必需测试各种数据。齿轮的误差对于齿轮的整体精度有重要的影响,也是整个齿轮箱检测的重要一环。当今,检测主要是利用手动和手动误差处置的机械测量措施。这种传统的检测方式耗时且难以保障测试数据的准确性。由于我们要保证测试的效率还有准确性,有必要自动改进具有双齿轮的传统集成测量仪器。
该设计主要设计用于自动转换传统测量装置的低效率和大误差检测,采用双面齿轮传动装置,它能够使检测效率,准确性和可靠性得提升。具有齿轮传动装置的改进的双作用集成测量仪器基本上由机械部件,步进电机等组成。改进后的齿轮啮合综合测量仪具备体积小,重量轻,操作简便,稳定性好的特点。
改进后的双面齿轮测量器采用步进电机控制装置的转动功能,用传感器替代用来检修测量,可以完成自动测量装置的综合误差,测量精度的提高,减少外界因素影响提升测量效率是可以达到的。
关键词: 齿轮双面啮合综合测量仪,位移传感器,步进电机,齿轮
1 齿轮综合误差试验机总体方案
1.1 总体方案设计
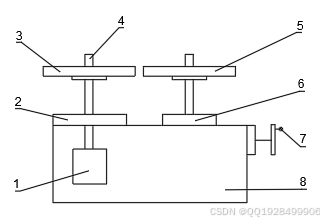
图2.1 自动化齿轮双面啮合综合测量仪的简图
第一种类型的测量仪器,如图2-1在箱体8内上安装一个步进电机1驱动轴4转动。再由轴4带动标准齿轮3,然后带动齿轮5作双啮合转动。 在箱体8设计一个用于安装手柄7用来把被测齿轮5驱动到位。被测齿轮和标准齿轮的中心距变化就是滑板6和底座8的位移。该结构以双齿仪原有的安装附件为基础进行改进设计,并附加了一些结构组合,使其成为一个系统。
1.2方案2 滑板直线移动式双齿仪
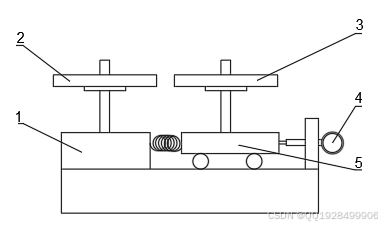
图2.2 滑板直线移动式双齿仪的简图
第二种类型的测量仪器,被测齿轮3和标准齿轮2中心距的变动将通过观察指示表4的指针得到。滑板直线移动式双齿仪这种仪器结构简单,但这种测量方式过程很麻烦,因而效率极其低,读数时会影响准确度。
1.3 方案3 支架摆动式双齿仪
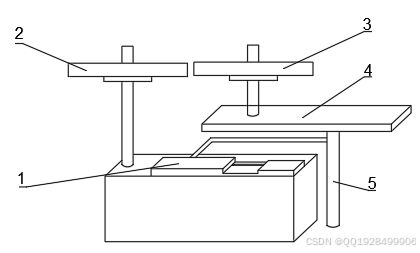
图2.3 支架摆动式双齿仪的简图
第三种类型的测量仪器,如图2-3通过重锤5的牵引可以带动1测量仪表的数值变动。1是带有传动链的记录仪器。支架摆动式双齿仪要求较高,不适合中小企业的大批量加工,生产效率低。
2 方案确定
方案1较方案2和方案3相比:方案1结构成本虽然相对较高,但功能稳定,测量具有可靠性,可以简化测量过程,提高测量精确度。方案2测量效率低,不适合大批量检测。齿轮检查仪需要在现场进行检测,方案3的设计在凹凸不平的环境下测量不稳定。综合以上三种方案,从环境要求、可用性、国内现有的技术等方面考虑,最终选择方案1。
综上所述:选用方案1合适。
3 动力驱动部分设计计算
3.1 步进电动机的介绍
根据组合电磁铁原理设计了步进电机。步进电动机的原理是由电脉冲信号转换成相关的线性位移,我们所说的电脉冲信号控制特殊运行方式的同步发动机。在特殊的角度旋转下并且不过载,脉冲率和脉冲数通常是能够控制转速和决定发动机停止的位置,而与是否过载并无关系,[6]所以向发动机发送信号将使发动机以步进角旋转,这种线性关系的存在和发动机停止位置只取决于转速和脉冲数,而不取决于负载的变化,即向发动机添加脉冲信号将以步进角旋转。总而言之:当传球手收到脉冲时,他移动步进发动机,让球在固定的轨道上划过,完成准确的定位是由脉冲数量的多少来操控角位移的,同时我们所确定的调速指标是靠控制发动机脉冲频率完成的。
3.2 步进电动机的分类及特点
3.2.1分类
步进电机有很多种,有旋转电动机还有直线电动机。根据电磁转矩产生原理,常用的旋转步进电机可分为三类:反应型(也称为磁阻型)步进电机、永磁型步进电机和混合型(也称为永磁电感型)步进电机。
3.2.2特点
(1)反应式步进电机的特点:起动,运转频率高和小步距角,使用长期功率大,具有自锁功能,功耗大,在我们日常生活中使用频繁。
(2)永磁式步进电机的特点:能量相对较小。在突发电力故障中,存在一个大的阶跃位置二进制和低的启动和运行频率。
(3)混合式步进电机的特点:它具有小的步距角(可以在与反作用步距角相同的小步距角下进行)、高的起动和运行频率、低的消耗和定位扭矩。结合了反应级发动机和永磁通道发动机的特点。因为采用了混合结构,结构更为复杂,所以有非常高的成本。
3.3 步进电动机的三要素
反应式步进电机是中国最广泛使用的步进电机之一。它具有广泛的速度控制,良好的动态性能,启动迅速,结构简便。因此,本设计采用第一种步进电动机也就是反应式步进电机。
步距角,静态转矩和电流。是步进电机的三个重要指标,了解这三个重要指标,因而就选择了我们设计所需要的步进电机的型号。[7]
(1)电机固有步距角
已知被测齿轮的最多齿数是400,每个齿采样10个点,标准齿轮的齿数为40,则经换算电机的步距角应不大于0.9°。
(2)静力矩的选择
我们通常首先确定电机的静态扭矩。一旦选择了静态扭矩,就可以确定电机的基准和长度(几何尺寸)。由于本设计电机驱动齿轮转动,齿轮转动所需力矩很小,由经验估算其大小约为1.5N·m。
(3)电流的选择
由于不同的电流参数,具有相同静态转矩的电动机具有不同的操作特性。我们可以依照步进电机的运行局频特性曲线图来判断。如图3.1所示。
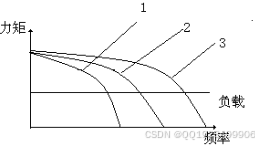
图3.1 步进电机的运行矩频特性曲线
4 丝杠螺母副的计算
4.1 滚珠丝杠螺母副的组成及工作原理
滚珠丝杠螺母副是完成旋转和直线运动的转换传动机构。特点是其构造螺杆螺母与球之间有螺旋槽,为了能够摩擦系数变小。当它们一起安装时,就形成了一个螺旋形的滚道,滚道内充满了滚珠轴承。当螺杆相对于螺母旋转时,它们之间会发生轴向位移。将滚珠在螺杆上旋转几圈后,通过回料导轨(滚珠回料装置)将滚珠在螺杆与螺母之间依次回滚,形成闭环管。[9]
4.2 耐磨性计算
丝杠螺母副的结构尺寸如图4.1和图4.2所示。
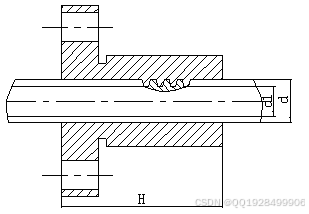
图4.1 丝杠螺母副的简图
5 控制系统
整个系统如图5.1 所示。
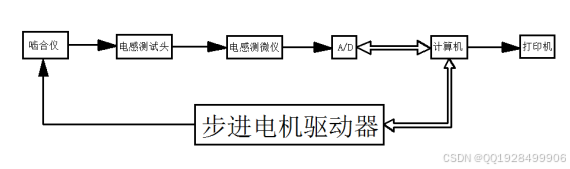
图5.1 控制系统介绍
原理:在本设计和测试过程中,当被测齿轮被手轮调整到合理的中心距并且两齿轮啮合正常时,步进电机驱动标准齿轮驱动被测齿轮进行双啮合运动,被测齿轮产生相对于浮滑板基座的相对位移。计算机把数据存储、分析,最后结合软件分析结果然后打印出来。[19]
6 圆柱齿轮参数
双面齿轮啮合综合测量仪的工作原理是使标准齿轮与被测齿轮啮合。在啮合过程中,通过测量两齿轮中心距的变化来测量齿轮的综合误差。
7 结 论
最后通过此次的毕业设计,不仅能够让我复习巩固了,在校期间所学的知识与专业课,同时提高了查阅手册、文献的能力,在制图、写作、表达叙述方面也得到了很大的提高,对制图软件Auto CAD,Proe使用也更加成熟稳定了。
通过本次对齿轮双面啮合综合测量仪的设计,得到的主要结论如下:
(1)通过了解对齿轮双面啮合综合测量仪的发展和使用情况,分析并设计了齿轮双面啮合综合测量仪的本体部分和动力驱动部分。
(2)通过对机械本体部分的轴、轴承、丝杠螺母副及其附件进行了设计和选用;动力驱动部分主要是对步进电机进行了选用和计算。
(3)通过了解对齿轮双面啮合综合测量仪的装置设计,分析出了传动的结构,设计了合理的传动零件及具体的设计参数。
(4)对先前确定的部件进行分析,确保其能完成本次设计要求。
(5)最后完成了齿轮双面啮合综合测量仪的装配图以及主要零件的零件图。
(6)对设计的齿轮双面啮合综合测量仪进行三维建模。

















 1389
1389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









