




 本文分享了一个基于昇腾AI异构计算架构CANN的辅助驾驶AI应用,实现了车辆检测和车距计算功能。利用YOLOv4目标检测算法,结合昇腾的强大算力平台,开发者可以高效地进行编程。项目源码已开源,可供开发者参考和实践。
本文分享了一个基于昇腾AI异构计算架构CANN的辅助驾驶AI应用,实现了车辆检测和车距计算功能。利用YOLOv4目标检测算法,结合昇腾的强大算力平台,开发者可以高效地进行编程。项目源码已开源,可供开发者参考和实践。
摘要:什么是辅助驾驶?简而言之,就是借助汽车对周围环境的自动感知和分析,让驾驶员预先察觉可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
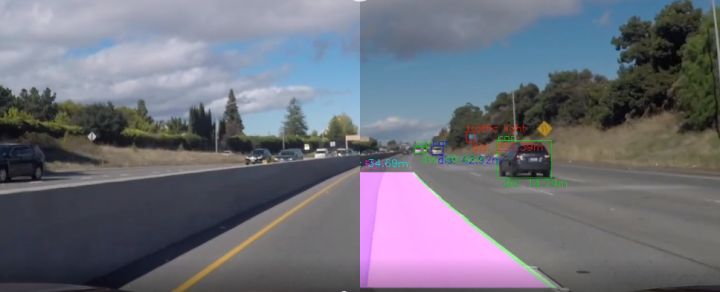
导读:基于昇腾AI异构计算架构CANN的辅助驾驶AI应用实战开发案例,不仅可以实时检测路面车辆,还能计算出车距,辅助驾驶员进行决策。此项目源码全部开源,传送门已开启,小伙伴们快来体验吧!
引言
科幻片中光怪陆离的飞行器,寄托着人类对未来出行的无限遐想。随着科技的进步,能够自动驾驶的汽车,已经离我们越来越近。
自动驾驶带给人类的惊喜不止是酷炫的自动超车变道,还有它在缓解交通阻塞、减少空气污染、提高道路安全性方面的种种可能性。因此也引得无数汽车企业、科技企业竞相加入这条行业赛道,力求不断突破。

然而,自动驾驶并不是一蹴而就的,由于技术瓶颈和相关法律法规的限制并未真正意义落地,当下的智能汽车正处于半自动驾驶(辅助驾驶)阶段。
什么是辅助驾驶?简而言之,就是借助汽车对周围环境的自动感知和分析,让驾驶员预先察觉可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
当然,辅助驾驶系统也是非常复杂的,为实现汽车在多种复杂场景下的通用性,以及技术层面的多样性,离不开人工智能技术。我们开发了一套基于昇腾AI异构计算架构CANN(Compute Architecture for Neural Networks)的简易版辅助驾驶AI应用,具备车辆检测、车距计算等基本功能,作为辅助驾驶入门级项目再合适不过啦!
话不多说,开启项目传送门:https://www.hiascend.com/zh/developer/mindx-sdk/driveassist
CANN是华为专门针对AI场景推出的异构计算架构,以提升用户开发效率和释放昇腾AI处理器澎湃算力为目的,并且提供多层次的AscendCL编程接口,支持用户快速构建基于昇腾平台的AI应用和业务。
当然,真正意义上的辅助驾驶系统远比这个AI应用更复杂,下面主要介绍如何借助AscendCL编程接口对输入视频进行预测推理,从而实现对车辆及车道线的智能检测。
典型的目标检测算法
为模仿驾驶员对车辆的辨别和分析,需要建立起一个类似人脑的算法结构,找出目标物体,确定它们的类别和位置。同时也需要解决影响检测准确性的一系列问题,比如汽车的外观和姿态、光照和遮挡等因素带来的干扰。
以YOLO(You Only Look Once)为代表的目标检测算法为各类物体的检测提供了更多可能性。从人脸检测到车流控制,从人群计数到农作物监控,目标检测算法在各领域都发挥着不可或缺的作用。
< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1165
1165

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









