



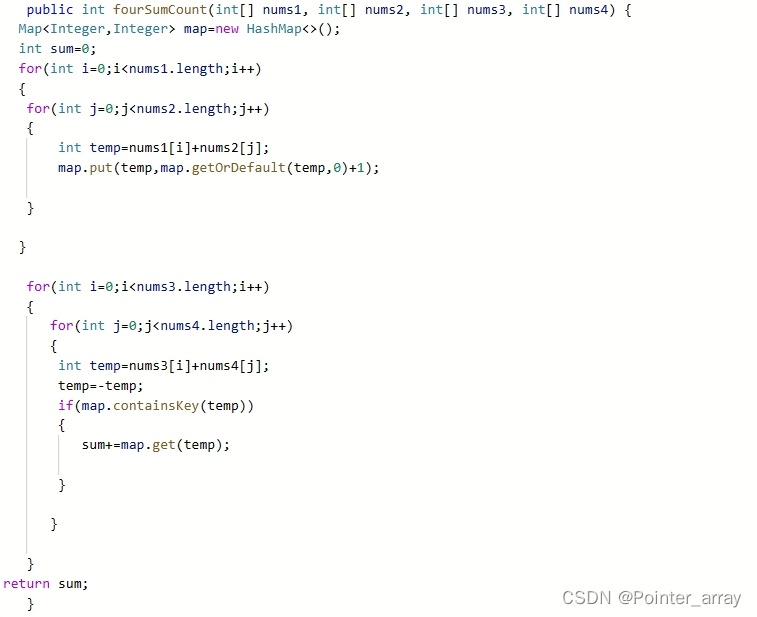
暴力求法
先求左边两个数组的元素之和
再把该元素和放入map中 只要两元素之和产生相同元素就在map的value中自增
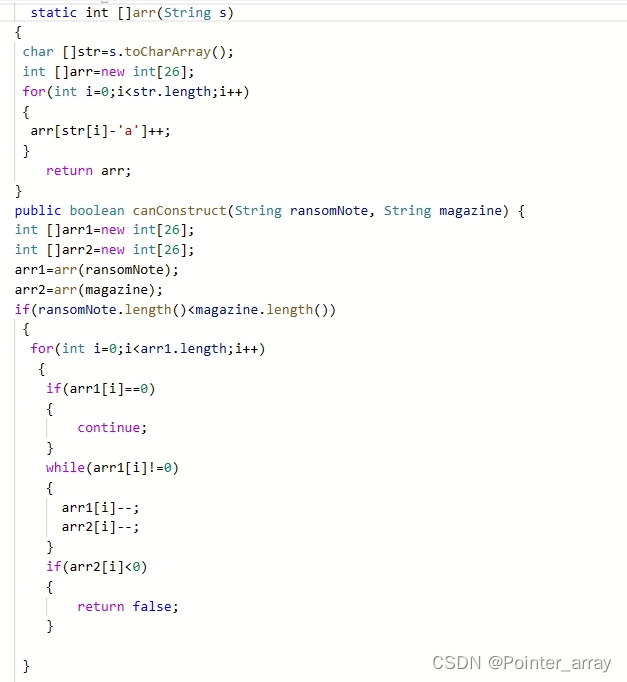
用hash表的方式对magazine的字符串进行存储
如果左边的字符串大于右边字符串明显是不能由右边字符串构成的
如果小于就一个个减少hash表中的值 如果右边边hash表中的值减为-1 就不能构成
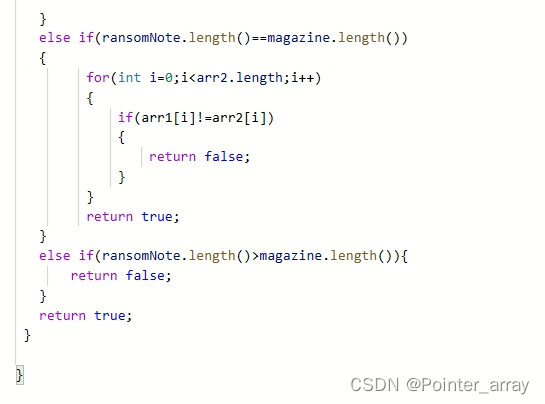
如果相等就遍历两表中元素是否相等 不相等就不能构成
三数之和和四数之和相差不大 四数之和多一个循环条件
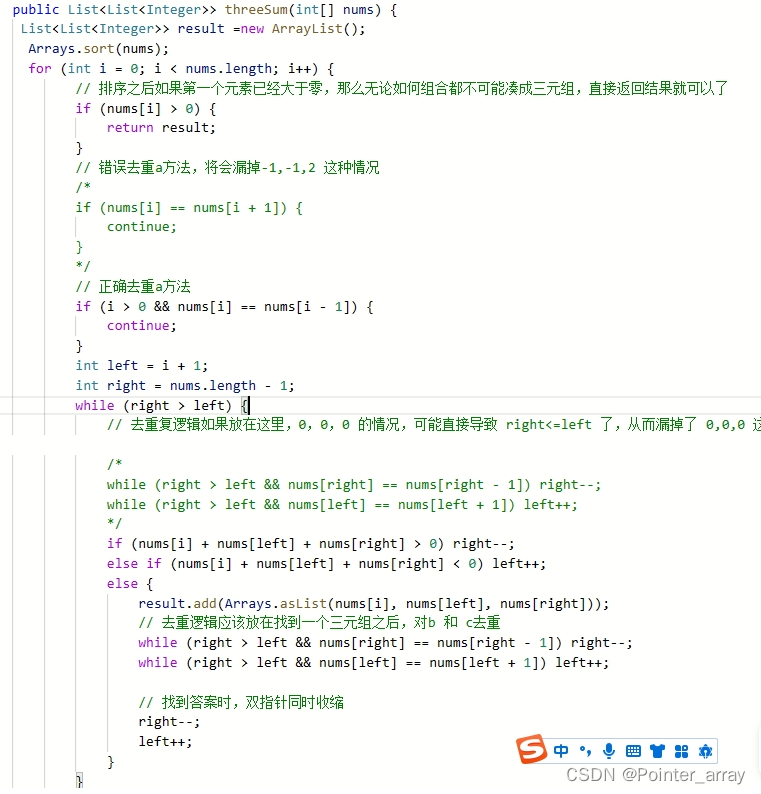
用指针法
如果三数想加的值大了 right-- 小了 left++
去重考虑 :
对于i的去重 比如[-1,-1,3]如果是nums[i]==nums[i+1];
就会生成两个这样的数据
如果是nums[i]==nums[i-1] 就可以对该数据去重
找到之后 也要对right和left去重

















 84
84




 到【灌水乐园】发言
到【灌水乐园】发言







