







 本文详细介绍了在C#环境下对ABB机器人的二次开发,包括点位信息的读取和写入。通过自定义的ABB机器人类,简化了开发过程,适用于自动化生产线和仓储物流等领域的应用。
本文详细介绍了在C#环境下对ABB机器人的二次开发,包括点位信息的读取和写入。通过自定义的ABB机器人类,简化了开发过程,适用于自动化生产线和仓储物流等领域的应用。
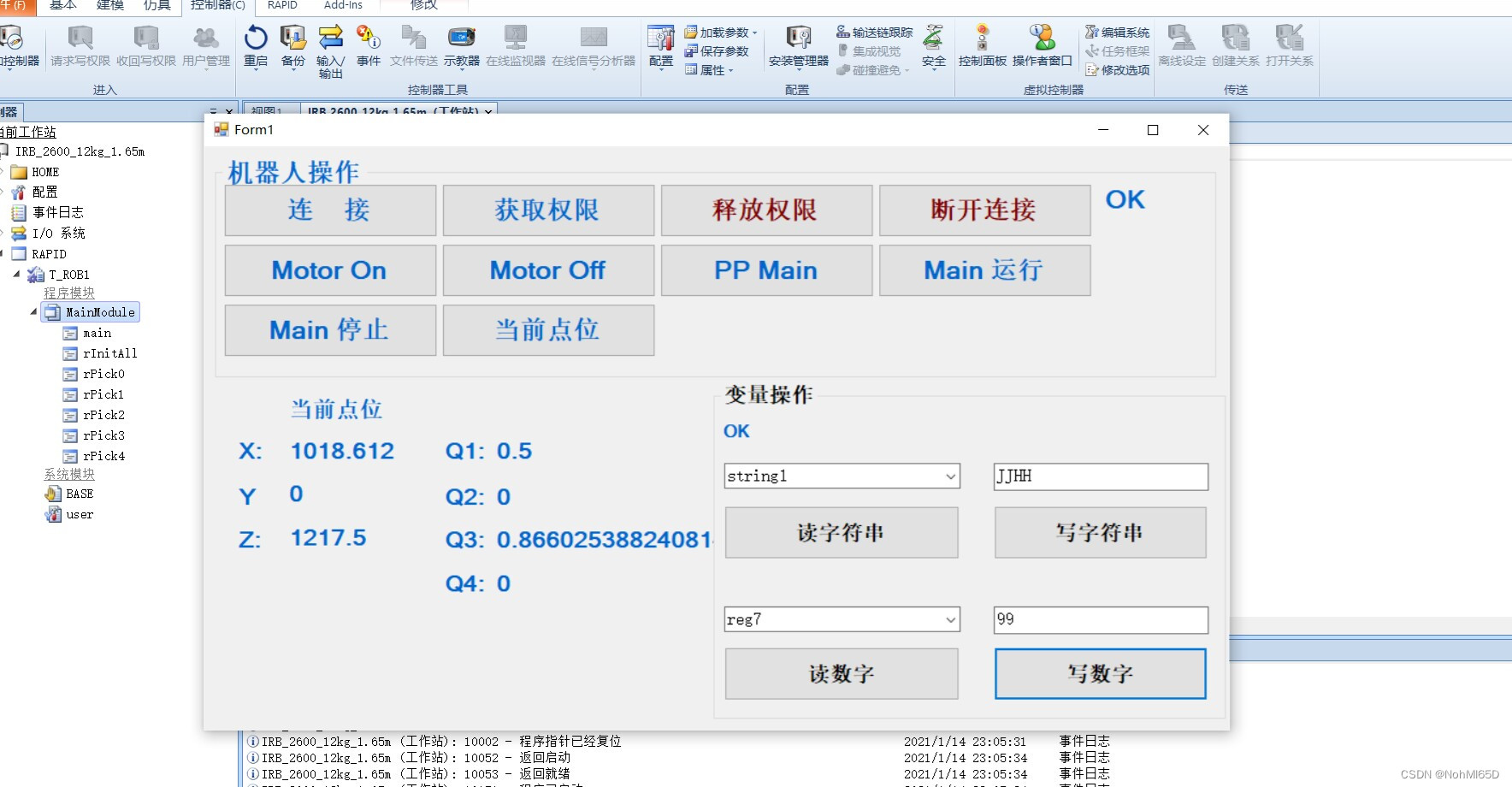
ABB机器人二次开发 C#读取和写入数据,可以获取点位信息及写入点位信息。
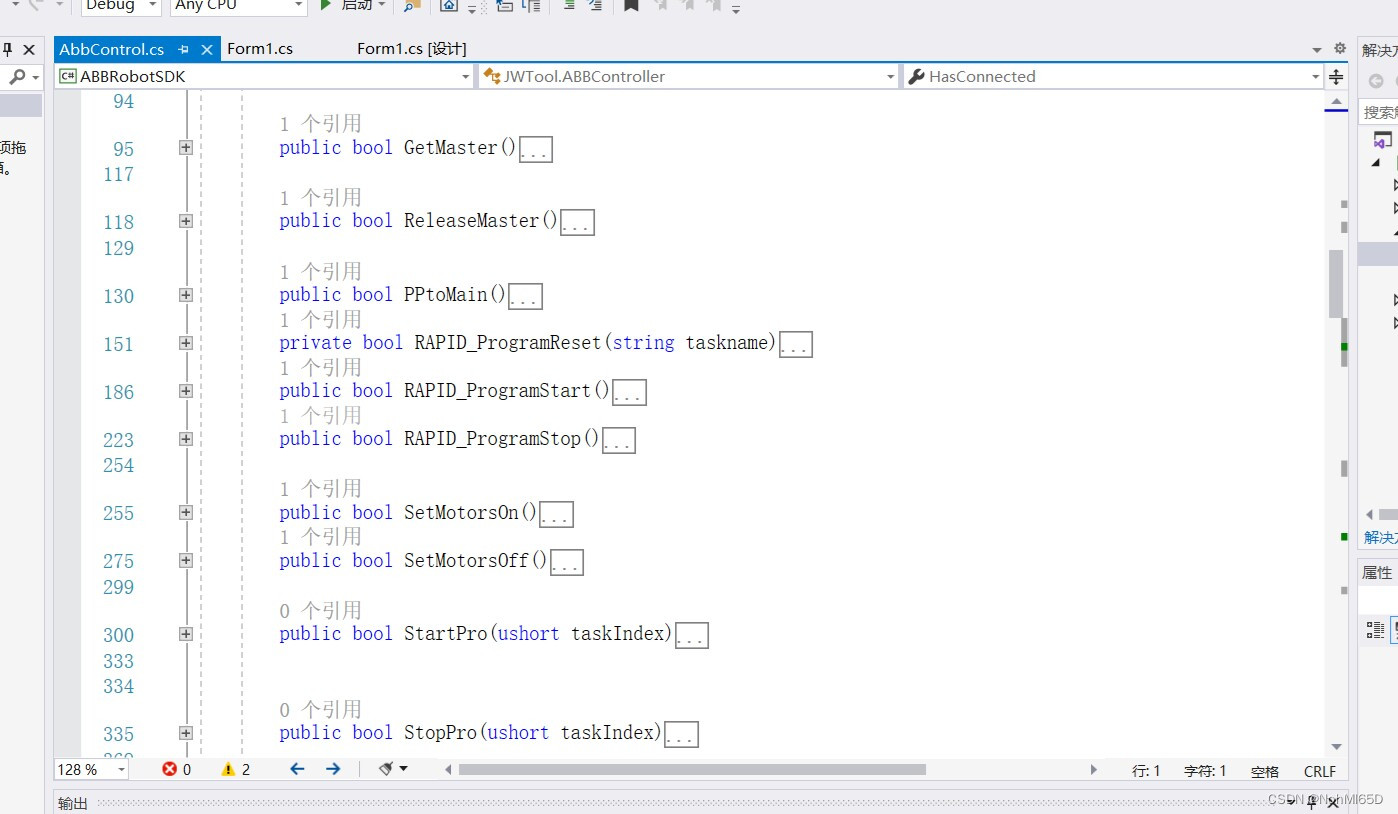
自己写的ABB机器人类,机器人常规操作功能都有,非常适合进行二次开发。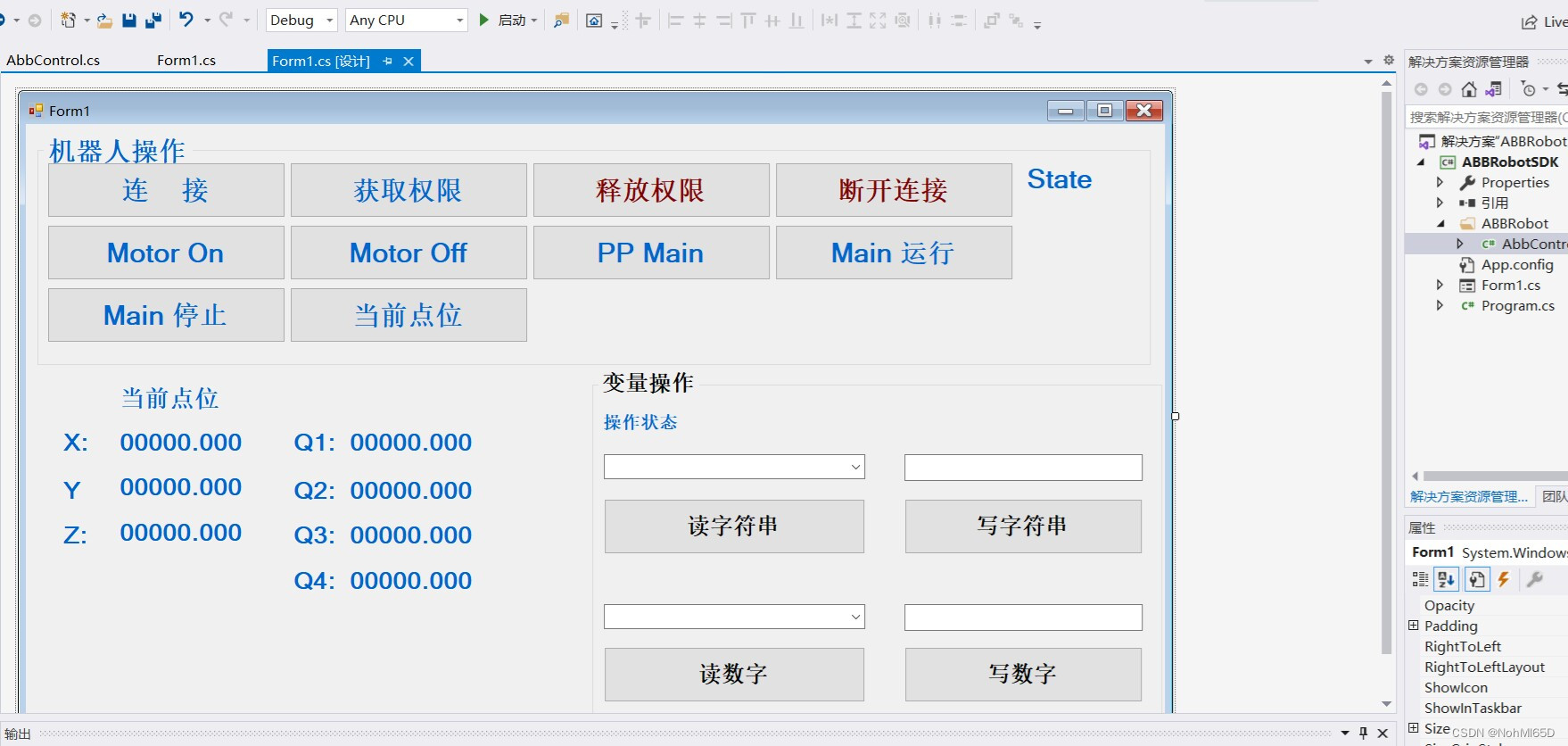
C#下的ABB机器人二次开发与点位信息读写
摘要:
本文将围绕C#环境下的ABB机器人二次开发展开,探讨如何读取和写入点位信息。通过自主编写的ABB机器人类,我们可以实现机器人常规操作功能,为二次开发提供极大的便利。
一、引言
随着工业自动化的发展,机器人技术日益成熟。ABB作为全球领先的工业机器人制造商,其机器人在各个领域得到广泛应用。在机器人应用中,二次开发是常见的需求,C#作为一种流行的编程语言,被广泛应用于ABB机器人的二次开发。本文将探讨在C#环境下,如何对ABB机器人进行二次开发,并实现点位信息的读取和写入。
二、ABB机器人与C#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1661
1661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









