




正文
研究四大子空间的意义
总结: 这一章节学习了矩阵的四大子空间。研究子空间的一个最主要的原因就是子空间的维度相比原空间更低,维度越低意味着空间越简单,如果能够保留关键信息直接降维到二维,或三维,我们就能进行更直观的可视化分析。在数据分析中,高维的数据存在计算性能低,分析的结果也可能不够好(维度灾难)这样的问题。所以如果能在降维,找到更低维度的空间,在这个空间来表示这些数据,且误差并不多的话,那么在这个子空间里研究高维数据效果会更好一些。
本章节学习的矩阵的四大子空间是一些更为复杂的降维子空间的一些基础\color {red} {\small本章节学习的矩阵的四大子空间是一些更为复杂的降维子空间的一些基础}本章节学习的矩阵的四大子空间是一些更为复杂的降维子空间的一些基础。
矩阵子空间的一些应用示例
在真实世界中,很多问题的本质就是求解线性系统Ax=bAx=bAx=b,求出其中的xxx。不过由于面对真实问题时,我们采样的时候会不断的采很多样本,因为我们倾向于认为样本越多越能反映总体的真实情况,所以这样建立的矩阵AAA就会非常庞大,这就是所谓的大数据。通常采样结果结果组成的矩阵AAA中,行记录是采样的样本,列记录的是每个样本的特征,而我们想要探究的就是样本的一些特征\color {red} {\small 一些特征}一些特征和我们想要探究的结果\color {red} {\small 结果}结果之间的关系,这个特征\color {red} {\small 特征}特征指的就是样本特征\color {red} {\small 样本特征}样本特征,这个关系就是求解得到的xxx。
在真实问题中,采集大量样本导致矩阵AAA的行数大于列数,意味着方差的个数远远大于未知数个数,在这种情况下,由于数据偏差,方程之间就容易出现矛盾,因此真实情况建立的线性系统Ax=bAx=bAx=b通常是无解的。 线性系统无解可能对应两种情况,要么是因为数据采集误差导致无法求解,要么就是我们探究的模型bbb本身不准确,或者说特征与探究的结果之间本应该是非线性关系,结果我们套用了线性模型所以无法求解,但其实并不是问题本身无解。
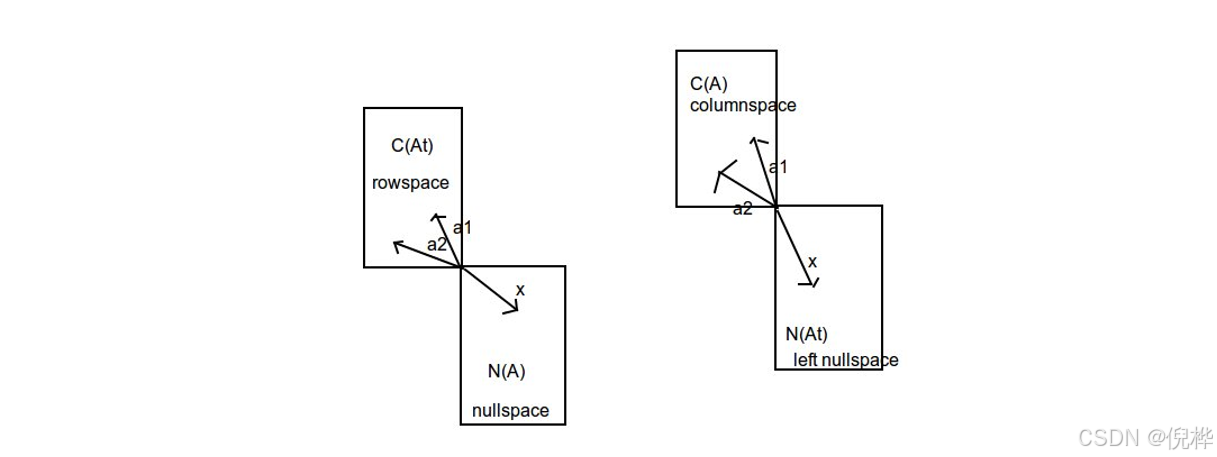
当我们并不需要一个十分精确的解,只需一个接近解也足够用于研究的情况下。对于Ax=bAx=bAx=b,单单对于AxAxAx来说,其实AxAxAx表示的就是矩阵AAA的列空间,从向量乘法看AxAxAx表示成xxx中的未知数与矩阵AAA的列向量相乘再相加的形式x1⋅v⃗1+x2⋅v⃗2+x3⋅v⃗3⋯x_1 \cdot \vec v_1+x_2 \cdot \vec v_2+x_3 \cdot \vec v_3 \cdotsx1⋅v1+x2⋅v2+x3⋅v3⋯,而这个表示形式的就是矩阵A的列向量的生成空间。既然AxAxAx是矩阵AAA的列空间,继而线性系统Ax=bAx=bAx=b的求解问题可以理解成在AxAxAx这个列空间中找到向量bbb,如果向量bbb在矩阵AAA的列空间中的话,那么就肯定会有一个或多个xxx与它相对应。所以在获取一个实际线性问题的近似解的时候,通常是在矩阵AAA的列空间中找到一个离bbb最近的b′b'b′,而这个离bbb最近的b′b'b′其实就是bbb在AAA的列空间中的投影,转而求解线性系统Ax=b′Ax=b'Ax=b′的解来近似Ax=bAx=bAx=b。



















 1401
1401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











