



✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🔥 内容介绍
无人机 (Unmanned Aerial Vehicle, UAV) 在军事侦察、灾害救援、物流运输等领域展现出巨大的应用潜力。然而,要充分发挥无人机的效能,高效可靠的路径规划至关重要。在复杂的三维空间环境中,如何规划出一条满足特定任务需求,并同时兼顾成本、安全、平稳等因素的优化路径,是一个极具挑战性的问题。本文旨在探讨一种基于帝国企鹅优化算法 (Artificial Fish School Optimization, AFO) 的无人机三维路径规划方法,并着重考虑目标函数中的各项要素,包括最优成本、路径长度、飞行高度、威胁规避以及转角限制。
一、无人机三维路径规划问题概述
无人机三维路径规划的目标是在给定起始点和目标点,以及复杂的三维环境信息的情况下,找到一条最优的飞行轨迹。这个“最优”的定义是多维度的,通常需要综合考虑以下几个关键因素:
-
成本 (Cost): 飞行成本直接关系到任务的经济性,包括燃料消耗、时间成本、维护费用等。路径长度是影响成本的重要因素,更短的路径通常意味着更低的成本。
-
路径长度 (Path Length): 路径长度是评估路径优劣的最直观指标之一。在相同起点和终点之间,更短的路径能够减少飞行时间和能量消耗。
-
飞行高度 (Flight Altitude): 飞行高度的选择对任务的成功执行至关重要。过低的飞行高度会增加与地形或障碍物碰撞的风险,而过高的飞行高度可能会暴露无人机,增加被侦测或攻击的可能性。因此,需要根据任务需求和环境特点,合理规划飞行高度。
-
威胁规避 (Threat Avoidance): 在敌对环境中,威胁规避是最重要的考量因素之一。无人机需要尽可能远离敌方雷达、防空导弹等威胁区域,以确保自身的安全。这就需要在路径规划中引入威胁模型,并将其作为目标函数的一部分进行优化。
-
转角限制 (Turning Angle): 无人机的机动能力受到物理限制,过大的转角会导致飞行不稳定,甚至发生坠机事故。因此,在路径规划中需要考虑无人机的最大转角限制,保证路径的平滑性,使无人机能够顺利执行飞行任务。
二、帝国企鹅优化算法 (AFO) 介绍
帝国企鹅优化算法 (AFO) 是一种模拟企鹅觅食行为的智能优化算法。该算法通过模拟企鹅的觅食、捕食、聚集等行为,实现对复杂问题的全局搜索和优化。AFO算法具有以下特点:
-
全局搜索能力强: AFO算法模拟了企鹅的游动和聚集行为,能够有效地探索搜索空间,避免陷入局部最优解。
-
鲁棒性好: AFO算法对参数设置不敏感,即使在参数选择不当的情况下,也能获得较好的优化结果。
-
易于实现: AFO算法的原理简单,易于理解和编程实现。
在无人机路径规划中,可以将AFO算法中的每一个企鹅个体视为一条可能的飞行路径,通过迭代优化,不断寻找更优的路径方案。
三、基于AFO的无人机三维路径规划方法
基于AFO的无人机三维路径规划方法的核心思想是将无人机路径规划问题转化为一个优化问题,并利用AFO算法求解该问题。具体步骤如下:
-
环境建模: 首先需要对三维环境进行建模,建立包括地形、障碍物、威胁区域等信息的环境地图。常用的建模方法包括栅格地图、八叉树地图等。
-
路径表示: 将无人机路径表示为一系列的三维坐标点,相邻坐标点之间采用直线或曲线连接。路径表示方法的选择会影响路径的平滑性和算法的复杂度。
-
目标函数定义: 针对无人机三维路径规划问题,需要定义一个综合考虑成本、路径长度、飞行高度、威胁规避以及转角限制的目标函数。例如,可以将目标函数定义为各项指标的加权和,如下所示:
ini
F = w1 * Cost + w2 * Length + w3 * Altitude + w4 * Threat + w5 * Turning其中,
F表示目标函数值,Cost表示成本,Length表示路径长度,Altitude表示飞行高度,Threat表示威胁程度,Turning表示转角大小,w1到w5表示各项指标的权重系数,需要根据实际任务需求进行调整。-
成本 (Cost): 可以用路径长度作为成本的近似,或者进一步考虑油耗、飞行时间等因素。
-
路径长度 (Length): 可以通过计算路径上相邻坐标点之间的距离之和来获得。
-
飞行高度 (Altitude): 可以计算路径上所有坐标点的高度与预设高度之间的偏差,并将其作为目标函数的一部分。目标是使无人机在保证安全的前提下,尽可能接近预设高度。
-
威胁规避 (Threat): 可以建立威胁区域模型,并计算路径与威胁区域的距离。距离越近,威胁程度越高。可以使用距离衰减函数来描述威胁程度与距离之间的关系。
-
转角限制 (Turning): 可以计算路径上相邻线段之间的夹角,并将其与无人机的最大转角限制进行比较。如果夹角超过最大转角限制,则对目标函数进行惩罚。
-
-
AFO算法初始化: 初始化一群企鹅个体,每个个体代表一条可能的无人机飞行路径。可以随机生成初始路径,也可以利用启发式算法生成初步的路径方案。
-
迭代优化: 利用AFO算法进行迭代优化,不断更新企鹅个体的位置,使其向更优的方向移动。在每次迭代过程中,需要计算每个企鹅个体的目标函数值,并根据目标函数值更新企鹅个体的状态。
-
觅食行为: 模拟企鹅在水中寻找食物的行为,每个企鹅个体在其周围随机搜索,找到更优的位置。
-
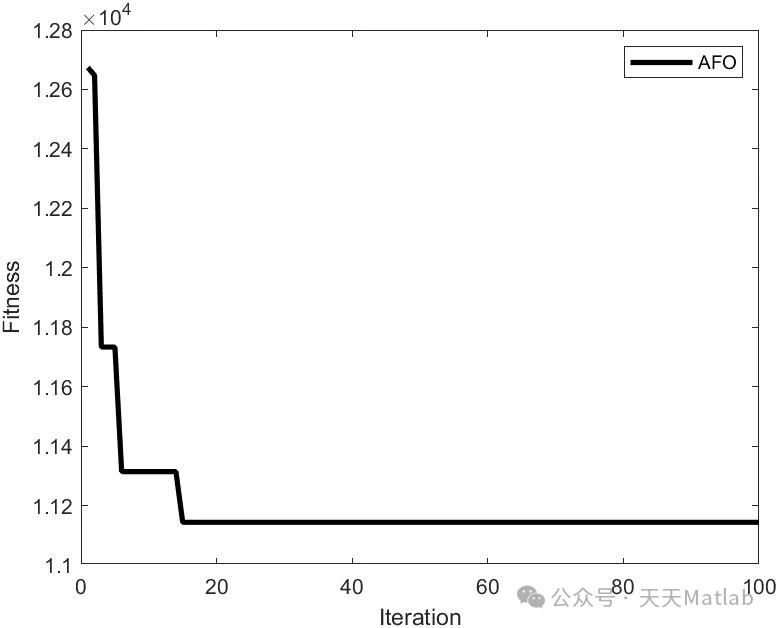
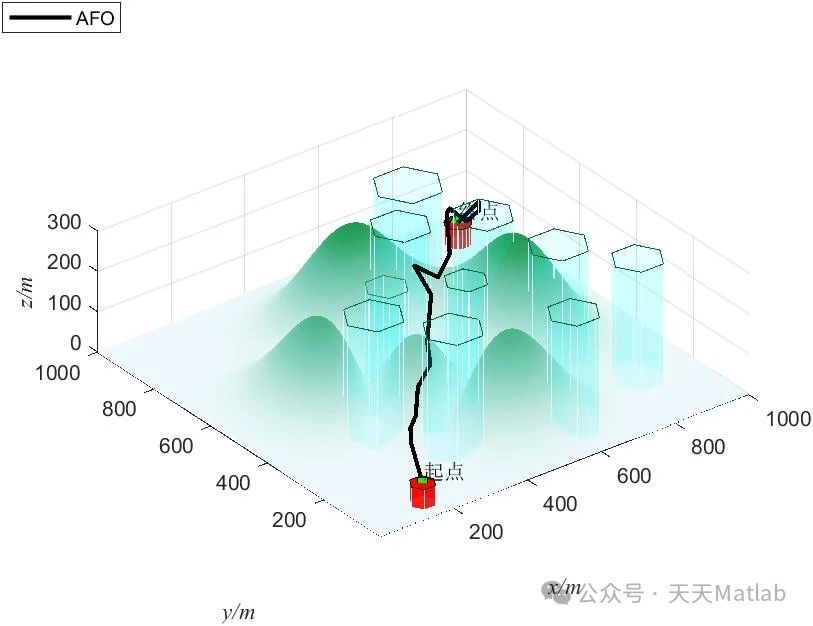
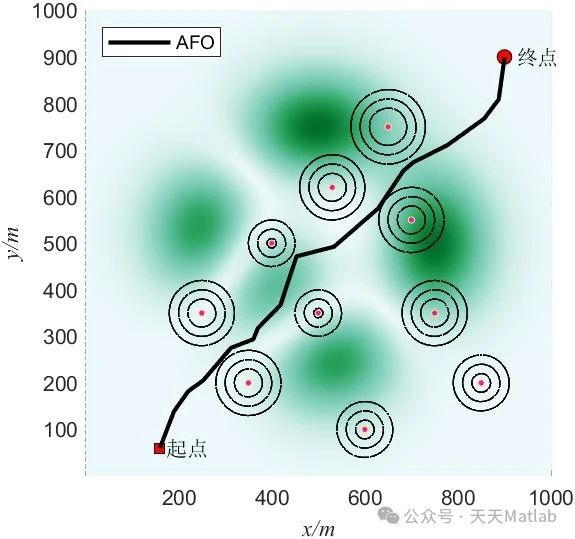
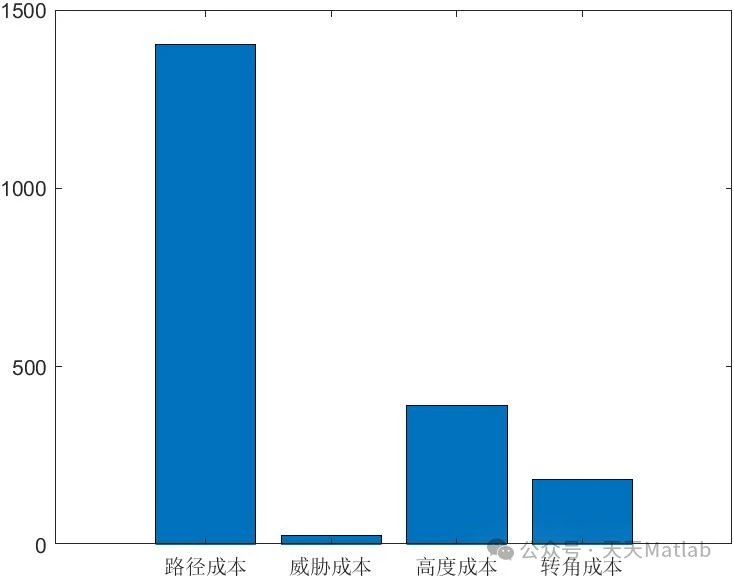
⛳️ 运行结果
🔗 参考文献
📣 部分代码
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🏆团队擅长辅导定制多种科研领域MATLAB仿真,助力科研梦:
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









