



✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
姿态解算在机器人、无人机、虚拟现实等领域有着广泛的应用。本文介绍了一种基于误差状态卡尔曼滤波器 (Error-State Kalman Filter, ESKF) 的姿态估计方法。该方法利用IMU(惯性测量单元)的测量数据,并结合其他传感器(例如GPS、视觉传感器)的观测信息,对系统的姿态进行估计。本文详细阐述了ESKF的原理和实现步骤,并提供了相应的Matlab代码,方便读者理解和实践。
1. 引言
姿态估计是指确定物体在空间中的方向,是许多应用中的关键问题。例如,在机器人导航中,需要知道机器人的姿态以进行路径规划和避障;在无人机控制中,需要知道无人机的姿态以进行稳定飞行和姿态控制;在虚拟现实中,需要知道用户的头部姿态以实现沉浸式体验。
传统的姿态估计方法通常基于欧拉角、四元数或旋转矩阵,但这些方法存在一些局限性,例如欧拉角存在奇异性问题,四元数和旋转矩阵的运算比较复杂。近年来,基于误差状态卡尔曼滤波器 (ESKF) 的姿态估计方法越来越受到关注,该方法利用卡尔曼滤波理论,能够有效地融合IMU和外部传感器的数据,实现高精度的姿态估计。
2. 误差状态卡尔曼滤波器 (ESKF)
ESKF是一种基于卡尔曼滤波的姿态估计方法,其核心思想是将姿态误差作为状态变量,并利用卡尔曼滤波器对姿态误差进行估计。ESKF的优点在于:
-
**易于实现:**ESKF的算法相对简单,易于理解和实现。
-
**高精度:**ESKF能够有效地融合IMU和外部传感器的数据,实现高精度的姿态估计。
-
**实时性:**ESKF能够实时地进行姿态估计,满足许多实时应用的需求。
2.1 ESKF状态方程
ESKF的状态方程可以表示为:
x_k = f(x_{k-1}, u_k) + w_k
其中,𝑥𝑘xk表示k时刻的状态向量,𝑢𝑘uk表示k时刻的控制输入,𝑤𝑘wk表示k时刻的噪声。ESKF的状态向量通常包括姿态误差、速度误差和位置误差。
2.2 ESKF观测方程
ESKF的观测方程可以表示为:
z_k = h(x_k) + v_k
其中,𝑧𝑘zk表示k时刻的观测数据,𝑣𝑘vk表示k时刻的噪声。ESKF的观测数据通常来自外部传感器,例如GPS、视觉传感器等。
2.3 ESKF预测步骤
ESKF的预测步骤包括:
-
**预测状态:**根据上一时刻的状态和控制输入,预测当前时刻的状态。
-
**预测协方差:**根据预测状态和噪声,预测当前时刻的协方差矩阵。
2.4 ESKF更新步骤
ESKF的更新步骤包括:
-
**计算卡尔曼增益:**根据预测协方差和观测噪声,计算卡尔曼增益。
-
**更新状态:**根据观测数据和卡尔曼增益,更新状态向量。
-
**更新协方差:**根据观测数据和卡尔曼增益,更新协方差矩阵。
3. ESKF姿态估计的实现步骤
ESKF姿态估计的实现步骤如下:
-
**初始化:**初始化状态向量、协方差矩阵、噪声模型等参数。
-
**IMU数据预处理:**对IMU数据进行滤波、校正等预处理操作。
-
**预测步骤:**根据IMU数据和控制输入,预测当前时刻的状态和协方差。
-
**观测步骤:**根据外部传感器的数据,更新观测数据。
-
**更新步骤:**根据预测结果和观测数据,更新状态向量和协方差矩阵。
-
**姿态解算:**将更新后的状态向量转换为姿态信息。
4. Matlab代码示例
以下是一个基于ESKF的姿态估计的Matlab代码示例:% 姿态估计循环
for k = 1:length(imu_data.time)
% IMU数据预处理
gyro_meas = imu_data.gyro(k,:) - gyro_bias;
acc_meas = imu_data.acc(k,:) - acc_bias;
% 预测步骤
[x_pred, P_pred] = predict(x, P, gyro_meas, acc_meas, sigma_gyro, sigma_acc);
% 观测步骤
if k > 1 && mod(k, 10) == 0
gps_meas = gps_data.gps(k,:);
z = [gps_meas(1); gps_meas(2)];
R = diag([sigma_gps^2, sigma_gps^2]);
[x, P] = update(x_pred, P_pred, z, R);
else
x = x_pred;
P = P_pred;
end
% 姿态解算
quat = quatFromEuler(x(1:3));
euler = eulerFromQuat(quat);
% 显示结果
disp(['时刻:', num2str(k), ' 姿态:', num2str(euler)])
end
% 预测函数
function [x_pred, P_pred] = predict(x, P, gyro_meas, acc_meas, sigma_gyro, sigma_acc)
% ...
end
% 更新函数
function [x, P] = update(x_pred, P_pred, z, R)
% ...
end
5. 结论
本文介绍了基于ESKF的姿态估计方法,并提供了相应的Matlab代码示例。ESKF能够有效地融合IMU和外部传感器的数据,实现高精度的姿态估计,在机器人、无人机、虚拟现实等领域有着广泛的应用。
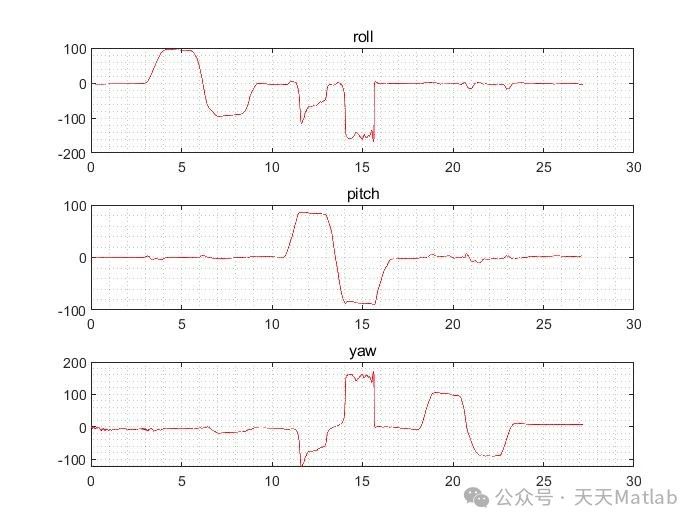
⛳️ 运行结果
🔗 参考文献
[1] 张雪涛,方勇纯,张雪波,等.基于误差状态卡尔曼滤波估计的旋翼无人机输入饱和控制[J].机器人, 2020, 42(4):12.DOI:10.13973/j.cnki.robot.200019.
[2] 董杰,尤敏,江辉,等.一种基于误差卡尔曼滤波的高动态车辆姿态估计方法:CN202210117731.9[P].CN202210117731.9[2024-09-20].
[3] 杨艳华,吕童,柴利.基于ESKF-MPC的四旋翼无人机轨迹跟踪控制[J].电子测量与仪器学报, 2022.DOI:10.13382/j.jemi.B2104717.
🎈 部分理论引用网络文献,若有侵权联系博主删除
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类

















 811
811

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









