



一、差分进化算法的介绍
差分进化算法(Differential Evolution, DE)是一种基于群体差异的启发式随机搜索算法,该算法是由R.Storn和K.Price为求解Chebyshev多项式而提出的。DE算法也属于智能优化算法,与前面的启发式算法,如ABC,PSO等类似,都属于启发式的优化算法。DE算法是我在一篇求解盒子覆盖问题论文中使用的一种优化算法。
二、差分进化算法的流程- 初始化种群
- 变异
- 交叉
- 选择
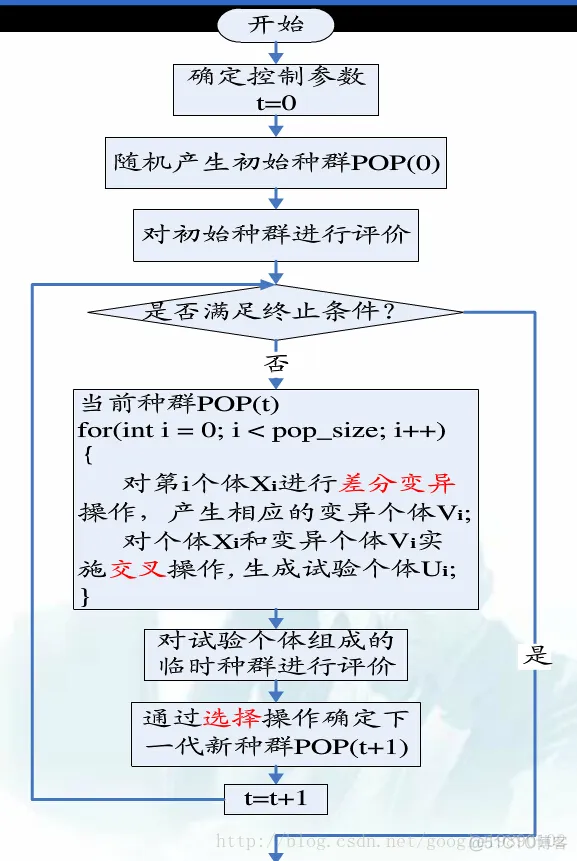
(DE流程)
三、差分进化的具体步骤对于无约束优化问题
利用差分进化求解这样的优化问题,主要分为初始化、变异、交叉和选择等几项操作。
1、初始化
如前面的的群智能优化算法一样,差分进化也需要初始化种群:
其中,是第
个个体,
表示第
维。
其中,和
分别为第
维的下界和上界,
表示在区间
上的随机数。
2、变异
DE算法通过差分策略实现个体变异,常见的差分策略是随机选取种群中两个不同的个体,将其向量差缩放后与待变异个体进行向量合成。
其中,,
和
是三个随机数,区间为
,
称为缩放因子,为一个确定的常数。
表示第
代。
3、交叉
交叉操作的目的是随机选择个体,因为差分进化也是一种随机算法,交叉操作的方法是:
其中,称为交叉概率。通过概率的方式随机生成新的个体。
4、选择
在DE中采用的是贪婪选择的策略,即选择较优的个体作为新的个体。
%清空环境
clear;
%定义地形对象
cTerrain = CTerrain3D;
%定义威胁区对象
cTread = CTread;
%调整为统一的图形环境
figure('Renderer','opengl');
%绘制地形和威胁区
cTerrain.draw();
cTread.draw();
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%数据形式说明
%xs 初始点位置集合,三维点集
%yt 目标点位置集合,三维点集
%MxsEna 能力矩阵,集合中的二元组表示最大最小飞行速度
%MxsDIs 最大航程矩阵,集合中的值表示UAV最大可飞的距离
%MytTOrd 任务点间的时序坐标,要求尽量在前面的先执行
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%调用目标分配算法
%AssignType表示不同的模型,1, N=M; 2, N>M; 3, N<M
%Key表示算法执行次数, 0,执行一次,1,执行多次
AssignType =1;
Key = 0;
%时间测试
Time = cputime;
%% 第一种情况的实验
if AssignType == 1
%%%%%%%%%%%%%%%%%%%%%%%数据区%%%%%%%%%%%%
xs = [%11 2 3;2 17 5; 34 26 7;5 2 2;6 33 3;27 34 6;21 45 5;25 12 3;22 17 11;13 31 12;
%45 21 11; 36 22 11;13 21 16;41 25 10;25 25 11;53 12 14;22 12 12;18 32 11; 67 34 12;26 16 15;
78 20 15;93 31 12;31 20 13;112 32 15; 134 26 17;45 52 12;36 63 13;67 34 16;21 85 15;32 62 13;];
yt = [%40 210 12;170 90 13 ; 80 197 21 ;172 120 13;160 56 13;160 143 21;170 200 21;113 200 12;97 134 16;100 145 11;
%81 101 21; 72 152 12; 133 60 11;84 164 21; 150 90 21;146 121 12; 167 54 12; 108 165 12;99 120 21;110 143 11;
70 181 12;15 133 13 ; 19 151 12 ;160 192 13;101 120 23;160 113 12;82 101 11;173 140 12;182 65 14; 128 156 12;];
MxsEna=[%0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3; 0.2 0.4;
% 0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;
0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.3 0.5;0.3 0.6;];
MxsDis=[%400 700 650 500 700 900 450 610 400 700
%650 500 700 900 450 610 700 900 450 610
500 700 300 350 700 900 450 610 450 610];
ytW = [%1 3 4 2 1 1 3 2 1 2
%3 2 1 3 2 1 2 3 2 1
1 1 1 1 1 1 1 1 1 1];
MytTOrd=[3 4; 5 2; 6 8; 7 4;];
%引入新的协同矩阵,最大起始时间矩阵
Twait = [];
Twindow=[];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if Key == 0
%%%%%%%%%%%%%%%%%%%%%%算法执行区%%%%%%%%%%%%%%%%%%
%调用目标分配算法,并取得解和相关数据,计算算法耗费时间
%定义目标分配算法对象
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,1);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
Time = cputime -t1;
% %结果
solU
solT
solC
solF
Time
else if Key == 1
for i=1:10
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,i);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
solu(i,:) = solU;
solt(i,:) = solT;
solc(i,:) = solC;
solf(i,:) = solF;
Time(i,:) = cputime -t1;
end %i
% %结果
solu
solt
solc
solf
Time
end % key=1
end % key=0
else if AssignType == 2
%% 第二种实验的情况
%%%%%%%%%%%%%%%%%%%%%%%数据区%%%%%%%%%%%%
xs = [%11 2 3;2 17 5; 34 26 7;5 2 2;6 33 3;27 34 6;21 45 5;25 12 3;22 17 11;13 31 12;
%45 21 11; 36 22 11;13 21 16;41 25 10;25 25 11;53 12 14;22 12 12;18 32 11; 67 34 12;26 16 15;
78 20 15;93 31 12;31 20 13;112 32 15; 134 26 17;45 52 12;36 63 13;67 34 16;21 85 15;32 62 13;];
yt = [%40 210 12;170 90 13 ; 80 197 21 ;172 120 13;160 56 13;160 143 21;170 200 21;113 200 12;97 134 16;100 145 11;
%81 101 21; 72 152 12; 133 60 11;84 164 21; 150 90 21;146 121 12; 167 54 12; 108 165 12;99 120 21;110 143 11;
70 181 12;15 133 13 ; 19 151 12 ;160 192 13 ];
MxsEna=[%0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3; 0.2 0.4;
% 0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;
0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.3 0.5;0.3 0.6;];
MxsDis=[%400 700 650 500 700 900 450 610 400 700
%650 500 700 900 450 610 700 900 450 610
500 700 300 350 700 900 450 610 450 610];
ytW = [%1 3 4 2 1 1 3 2 1 2
%3 2 1 3 2 1 2 3 2 1
1 1 1 1];
%这个数据里都代表的是目标点,是目标点与目标点的关系
MytTOrd=[3 2];
%引入新的协同矩阵,最大起始时间矩阵
Twait = [30 40 20 15 50 70 30 80 90 65];
Twindow=[];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if Key == 0
else if Key == 1
for i=1:20
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,i);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
solu(i,:) = solU;
solt(i,:) = solT;
solc(i,:) = solC;
solf(i,:) = solF;
Time(i,:) = cputime -t1;
end %i
% %结果
solu
solt
solc
solf
Time
end % key=1
end % key=0
else if AssignType == 3
%% 第三种实验的情况
%%%%%%%%%%%%%%%%%%%%%%%数据区%%%%%%%%%%%%
xs = [%11 2 3;2 17 5; 34 26 7;5 2 2;6 33 3;27 34 6;21 45 5;25 12 3;22 17 11;13 31 12;
%45 21 11; 36 22 11;13 21 16;41 25 10;25 25 11;53 12 14;22 12 12;18 32 11; 67 34 12;26 16 15;
78 20 15;93 31 12;31 20 13;112 32 15];
yt = [%40 210 12;170 90 13 ; 80 197 21 ;172 120 13;160 56 13;160 143 21;170 200 21;113 200 12;97 134 16;100 145 11;
%81 101 21; 72 152 12; 133 60 11;84 164 21; 150 90 21;146 121 12; 167 54 12; 108 165 12;99 120 21;110 143 11;
70 131 12;15 133 13 ; 19 151 12 ;160 192 13;101 120 23;160 113 12;82 101 11;173 140 12;182 65 14; 45 176 12;];
MxsEna=[%0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3; 0.2 0.4;
% 0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;
0.2 0.5; 0.3 0.4;0.4 0.75;0.3 0.45];
MxsDis=[%400 700 650 500 700 900 450 610 400 700
%650 500 700 900 450 610 700 900 450 610
700 700 900 650];
ytW = [%1 3 4 2 1 1 3 2 1 2
%3 2 1 3 2 1 2 3 2 1
1 1 1 1 1 1 1 1 1 1];
MytTOrd=[3 4; 5 2];
%引入新的协同矩阵,最大起始时间矩阵
Twait = [30 40 20 15];
Twindow=[1300,6000];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if Key == 0
%%%%%%%%%%%%%%%%%%%%%%算法执行区%%%%%%%%%%%%%%%%%%
%调用目标分配算法,并取得解和相关数据,计算算法耗费时间
%定义目标分配算法对象
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,1);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF] = DDE1.run();
Time = cputime -t1;
% %结果
solU
solT
solC
solF
Time
else if Key == 1
for i=1:20
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,i);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
solu(i,:) = solU;
solt(i,:) = solT;
solc(i,:) = solC;
solf(i,:) = solF;
Time(i,:) = cputime -t1;
end %i
% %结果
solu
solt
solc
solf
Time
end % key=1
end % key=0
end % type =3
end % type =2
end % type=1- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
- 143.
- 144.
- 145.
- 146.
- 147.
- 148.
- 149.
- 150.
- 151.
- 152.
- 153.
- 154.
- 155.
- 156.
- 157.
- 158.
- 159.
- 160.
- 161.
- 162.
- 163.
- 164.
- 165.
- 166.
- 167.
- 168.
- 169.
- 170.
- 171.
- 172.
- 173.
- 174.
- 175.
- 176.
- 177.
- 178.
- 179.
- 180.
- 181.
- 182.
- 183.
- 184.
- 185.
- 186.
- 187.
- 188.
- 189.
- 190.
- 191.
- 192.
- 193.
- 194.
- 195.
- 196.
- 197.
- 198.
- 199.
- 200.
- 201.
- 202.
- 203.
- 204.
- 205.
- 206.
- 207.
- 208.
- 209.
- 210.
- 211.
- 212.
- 213.
- 214.
- 215.
- 216.
- 217.
- 218.
- 219.
- 220.
- 221.
- 222.
- 223.
- 224.
- 225.
- 226.
- 227.
- 228.
- 229.
- 230.
- 231.
- 232.
- 233.
- 234.
- 235.
- 236.
- 237.
- 238.
- 239.
- 240.
- 241.
- 242.
- 243.
- 244.
- 245.
- 246.
- 247.
- 248.
- 249.
- 250.
- 251.
- 252.
- 253.
- 254.
- 255.
- 256.
- 257.
- 258.
- 259.
- 260.
- 261.
- 262.
- 263.
- 264.
- 265.
- 266.
- 267.
- 268.
- 269.
- 270.
- 271.
- 272.
- 273.
- 274.
- 275.
- 276.

















 482
482

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









