



 本文介绍了利用MATLAB进行GPS多重相关器仿真的重要性,通过仿真评估其性能,优化信号模型和噪声处理,以提升GPS定位精度。着重讨论了信号模型、噪声模型和仿真算法在GPS接收机设计中的应用。
本文介绍了利用MATLAB进行GPS多重相关器仿真的重要性,通过仿真评估其性能,优化信号模型和噪声处理,以提升GPS定位精度。着重讨论了信号模型、噪声模型和仿真算法在GPS接收机设计中的应用。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
在现代社会中,全球定位系统(GPS)已经成为人们生活中不可或缺的一部分。无论是在导航、交通管理还是军事领域,GPS都发挥着重要的作用。而要确保GPS系统的准确性和可靠性,多重相关器仿真是不可或缺的一项技术。
多重相关器是GPS接收机中的一个重要组件,用于接收和处理来自卫星的信号。它通过将接收到的信号与已知的GPS信号进行比较和相关,来计算出接收机与卫星之间的距离差。这个距离差进一步用于计算接收机的位置和时间。
为了确保多重相关器的准确性,仿真是一个必要的步骤。通过仿真,我们可以模拟实际的GPS信号和噪声,并评估多重相关器在不同条件下的性能。这样可以帮助我们优化和改进GPS系统,以提高其定位精度和鲁棒性。
在进行GPS多重相关器仿真时,有几个关键的方面需要考虑。首先是信号模型。我们需要准确地模拟GPS信号的特性,包括频率、幅度和相位等。其次是噪声模型。由于GPS信号在传输过程中会受到各种干扰和噪声的影响,我们需要模拟这些噪声,以评估多重相关器的性能。最后是仿真算法。我们需要选择合适的算法来计算多重相关器的输出,以获得准确的距离差和位置信息。
在进行GPS多重相关器仿真时,我们还需要考虑不同的场景和条件。例如,城市环境和开放空旷的乡村地区之间的信号传播特性会有所不同。此外,天气条件、信号遮挡和多径效应等因素也会对GPS信号的传输和接收造成影响。因此,我们需要在仿真中考虑这些因素,以获得更准确和可靠的结果。
通过GPS多重相关器仿真,我们可以评估不同算法和参数设置对GPS系统性能的影响。这有助于我们优化GPS接收机的设计和配置,以满足不同应用场景的需求。例如,在城市环境中,由于信号遮挡和多径效应的影响,我们可以通过仿真找到更好的算法和参数设置,以提高定位精度和可靠性。
此外,GPS多重相关器仿真还可以用于教育和培训目的。通过仿真,学生和工程师可以更好地理解GPS系统的原理和工作方式。他们可以通过调整参数和观察仿真结果,深入了解多重相关器的性能和特性。
总之,GPS多重相关器仿真是确保GPS系统准确性和可靠性的重要步骤。通过仿真,我们可以评估和优化GPS系统的性能,以满足不同应用场景的需求。同时,仿真还可以用于教育和培训,帮助人们更好地理解和应用GPS技术。随着技术的不断进步,我们相信GPS多重相关器仿真将在未来发展中发挥更重要的作用。
GpsMultiCorrelator 是一个 MATLAB 类,包含以下功能所需的属性和方法:
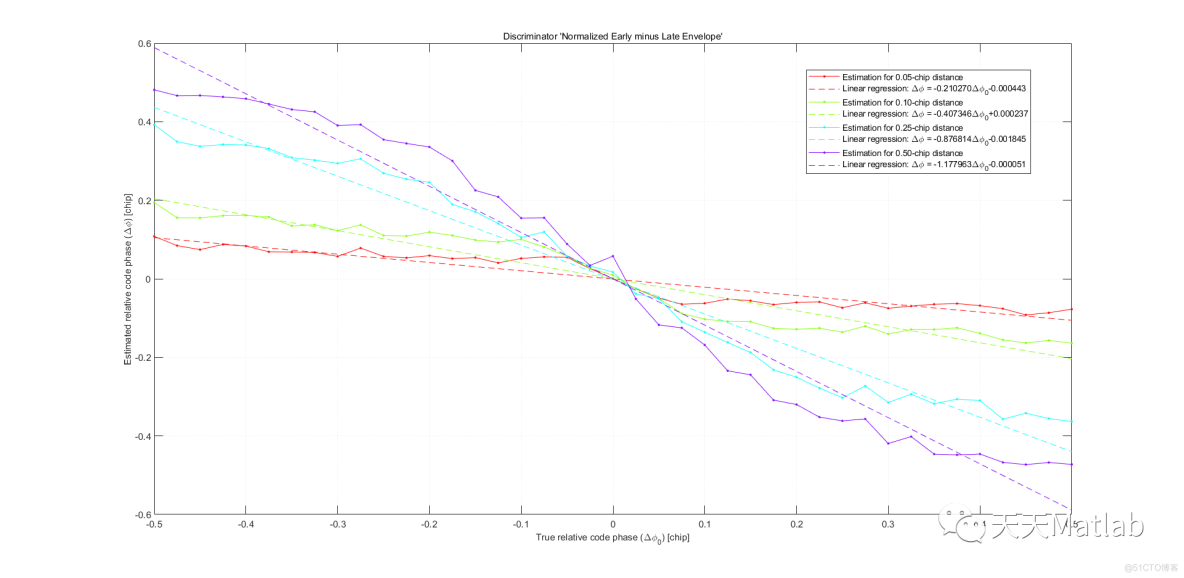
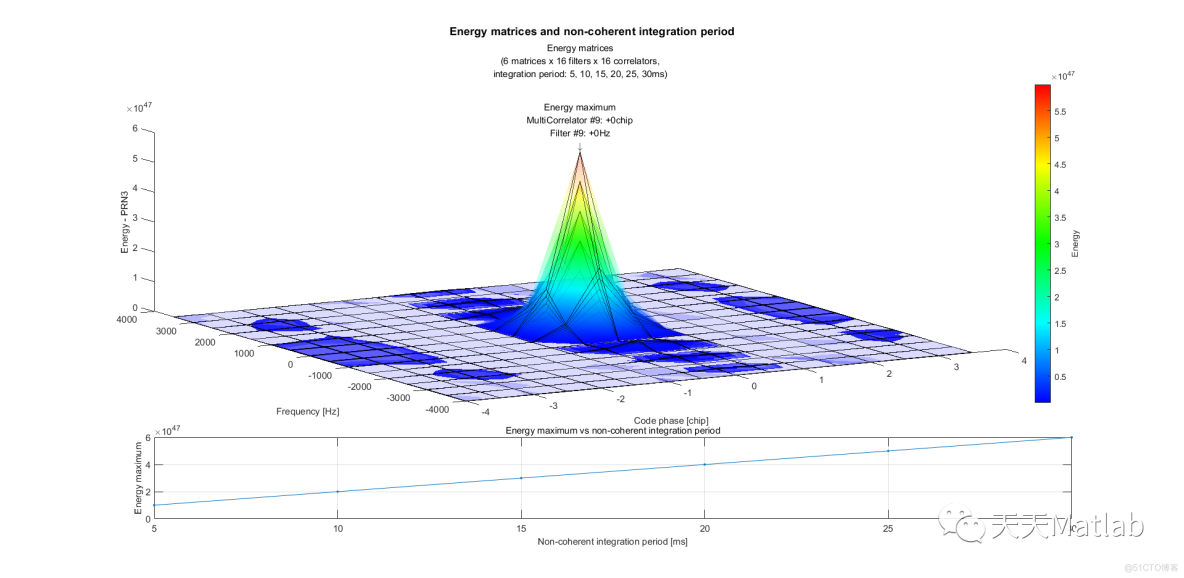
根据接收信号的假设(PRN、多普勒和码相位)设置本地信号,相关器特性的定义,根据滤波器频率、相关器码相位、积分周期和在积分周期结束时应用的码相位增量,将接收到的信号注入为复杂的时间值(有关 GPS 信号的合成,请参阅 GpsSignals 类),对于定义的滤波器频率和相关器码相位以及非相干积分周期,能量矩阵的计算,考虑更新下一个矩阵相关器码相位的码相位增量,对于定义的相关器码相位和 1ms 的相干积分周期,计算同相/正交分量,通过非相干和相干方法的估计,应用于同相/正交分量,通过基于早期、即时和晚期相关器的鉴别器估计码相位,应用于同相/正交分量。
📣 部分代码
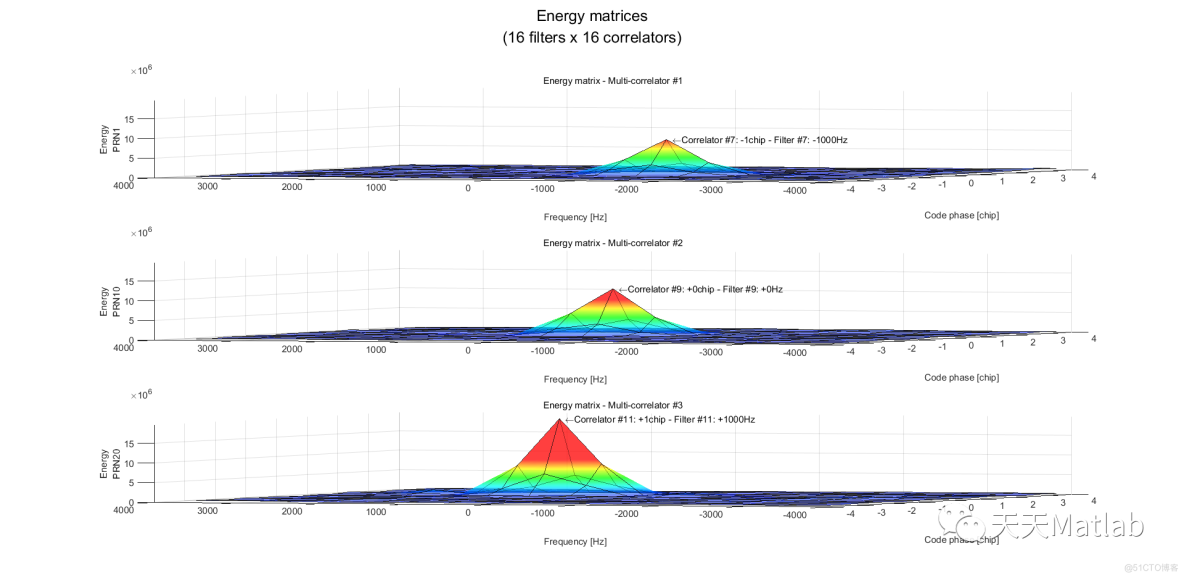
%% Example 'GpsMultiCorrelator' #4: Generation of energy matrices by three multi-correlators
%
% Generation, by three multi-correlators, of an energy matrices resulting from the accumulation of non-coherent correlation results between:
% - A received signal including three GPS signals,
% - Three local signals with the same PRN and Doppler/code phase covered by energy matrix filter/correlator hypotheses.
% Parameters
SamplingPeriod = 100e-9;
CarrierFrequency = 0;
PRN = [1 10 20];
CN0 = [43 45 47];
Dopplers = [-1e3 0 +1e3];
CodePhases = [-1 0 +1];
Duration = 20e-3;
% Creation of 'GpsSignals' object
GPS = ...
GpsSignals('SamplingPeriod', SamplingPeriod,...
'CarrierFrequency', CarrierFrequency,...
'NextValues', 'add',...
'PRN', PRN,...
'CN0', CN0,...
'Doppler', Dopplers,...
'CodePhase', CodePhases);
for n = 1:numel(PRN)
% Creation of 'GpsMultiCorrelator' object
MultiCorrelators(n) = ...
GpsMultiCorrelator('SamplingPeriod', SamplingPeriod,...
'CarrierFrequency', CarrierFrequency,...
'FilterFrequencies', -4000:500:+4000-500,...
'CorrelatorCodePhases', -4:0.5:+3.5,...
'PRN', PRN(n),...
'Doppler', 0,...
'CodePhase', 0,...
'NonCoherentIntegrationPeriod', inf); %#ok<SAGROW>
end
% Update of GPS signals
GPS.update('Duration',Duration);
% Correlation
for n = 1:numel(PRN)
MultiCorrelators(n).correlate(GPS.Values);
MultiCorrelators(n).finalize();
end
% Figure
Figure = ...
figure('Color','w','Name','');
% Map
Map = hsv;
Map = Map(1:find(diff(Map(:,1))>0,1,'first'),:);
Map = [Map;0 0 1];
% Energy maximum
Maximum = 0;
for n = 1:numel(PRN)
% Creation of axes
Axes(n) = subplot(numel(PRN),1,n); %#ok<SAGROW>
% Display of energy matrix
[CorrelatorCodePhases,FilterFrequencies] = meshgrid(MultiCorrelators(n).EnergyMatrices.CodePhases,MultiCorrelators(n).EnergyMatrices.Frequencies);
surf(Axes(n),CorrelatorCodePhases,FilterFrequencies,MultiCorrelators(n).EnergyMatrices.Matrix,MultiCorrelators(n).EnergyMatrices.Matrix,...
'FaceColor','Interp','EdgeAlpha',0.75,'FaceAlpha',0.5);
% Display of maximum
[i,j] = find(eq(MultiCorrelators(n).EnergyMatrices.Matrix,max(MultiCorrelators(n).EnergyMatrices.Matrix,[],'all')));
text(MultiCorrelators(n).EnergyMatrices.CodePhases(j),MultiCorrelators(n).EnergyMatrices.Frequencies(i),MultiCorrelators(n).EnergyMatrices.Matrix(i,j),...
[' \leftarrow',...
sprintf('Correlator #%u: %+.fchip - ',j,MultiCorrelators(n).EnergyMatrices.CodePhases(j)),...
sprintf('Filter #%u: %+.fHz',i,MultiCorrelators(n).EnergyMatrices.Frequencies(i))],...
'HorizontalAlignment','left',...
'VerticalAlignment', 'middle');
% Display of informations
title(sprintf('Energy matrix - Multi-correlator #%u',n));
xlabel('Code phase [chip]');
ylabel('Frequency [Hz]');
zlabel({'Energy',sprintf('PRN%u',PRN(n))});
% Colorbar
colormap(fliplr(Map));
% Energy maximum
Maximum = max(Maximum,[0 MultiCorrelators(n).EnergyMatrices.Matrix(i,j)]);
end
% Title
sgtitle({'Energy matrices',...
sprintf('(%u filters x %u correlators)',...
numel(MultiCorrelators(n).EnergyMatrices(1).Frequencies),...
numel(MultiCorrelators(n).EnergyMatrices(1).CodePhases))});
% View update
set([Axes';findall(Axes,'type','text')],'fontsize',9);
linkprop(Axes,{'CameraPosition','CameraUpVector','Xlim','Ylim','Zlim','Clim'});
set(Axes,'Zlim',Maximum);
view(Axes(1),-70,+10);
% Maximization of figure
Figure.WindowState = 'maximized';
⛳️ 运行结果
🔗 参考文献
[1]黄富瑜,李刚,张雏,等.基于Matlab仿真的联合变换相关器实验[J].物理实验, 2009, 29(9):4.DOI:10.3969/j.issn.1005-4642.2009.09.002.

















 1004
1004

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









