



 本文探讨了在人与四旋翼飞行器交互中实施准入控制策略,通过车辆传感器数据估计力并调整参考轨迹,利用Kalman滤波进行位置和姿态控制。策略通过模拟验证适用于接近悬停的飞行任务。
本文探讨了在人与四旋翼飞行器交互中实施准入控制策略,通过车辆传感器数据估计力并调整参考轨迹,利用Kalman滤波进行位置和姿态控制。策略通过模拟验证适用于接近悬停的飞行任务。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
⛄ 内容介绍
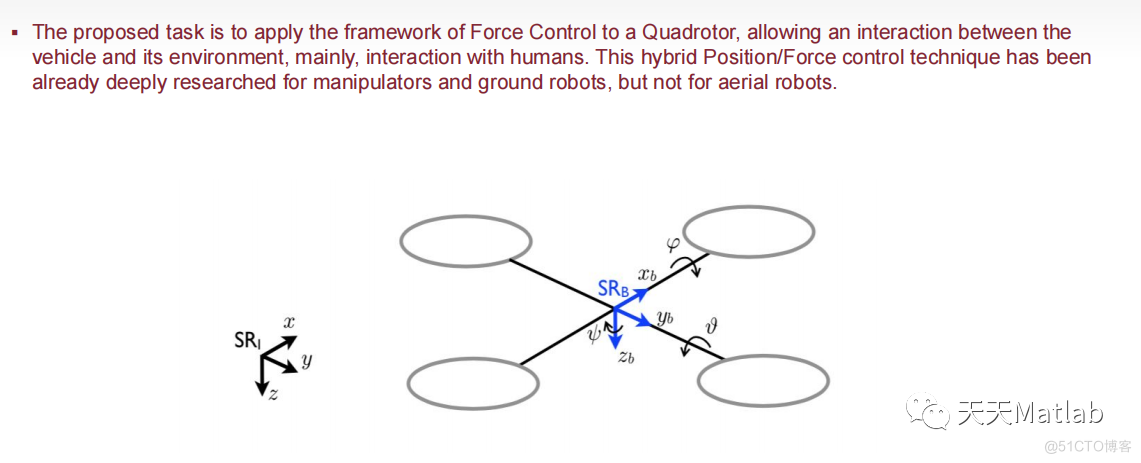
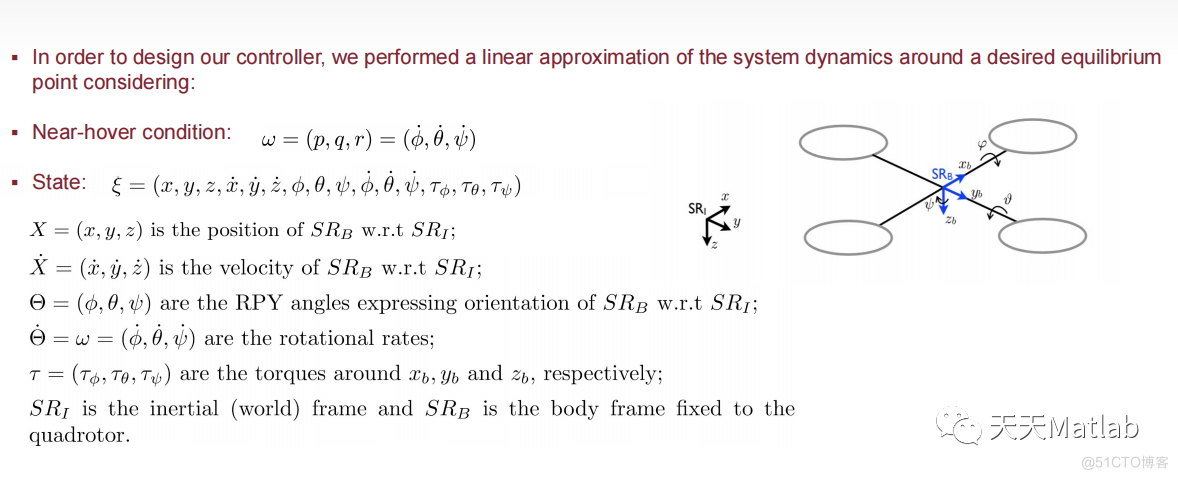
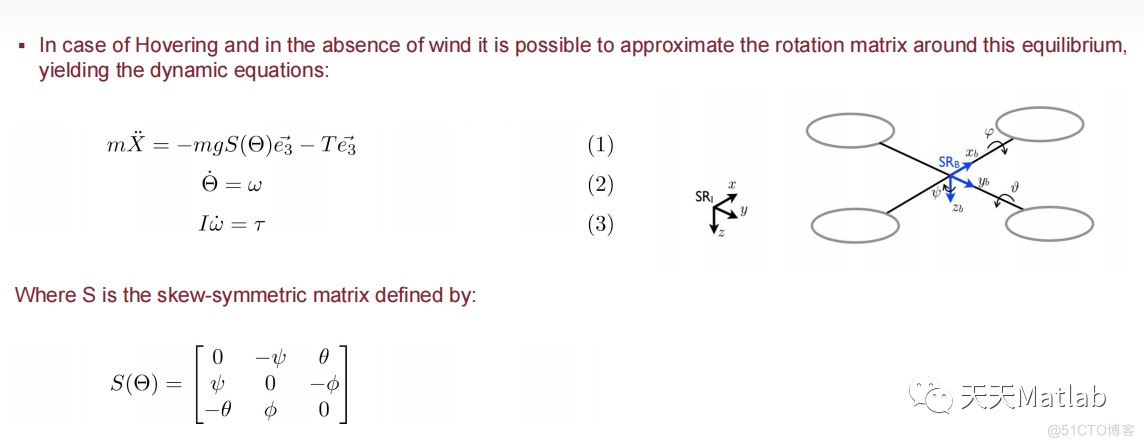
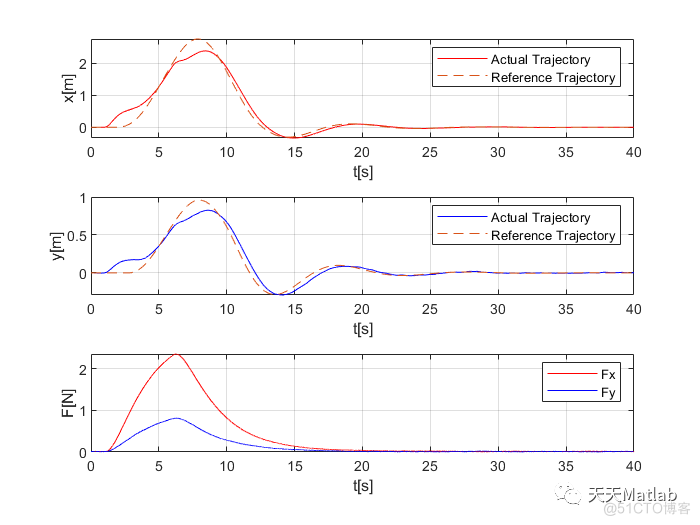
本报告分析了在人与四旋翼飞行器之间应用准入控制策略的适用性。该策略允许用户在交互发生时定义机器人的期望行为。系统施加的力是通过来自车辆传感器的位置和方向信息估计出来的,并输入到准入控制器中,该控制器将相应地修改参考轨迹以适应这种力。然后,一个基于反步法的位置和姿态控制器跟踪该轨迹,该控制器是针对接近悬停条件而构建的。所采用的策略经过模拟验证,证明了该方法适用于此任务。
⛄ 部分代码
%% Definition of Kalman Filter Matrixes
% We consider the augmented state xk = (x,f)
Ak = zeros(18,18);
Ak(1:15,1:15) = A;
Ak(4:6,16:18) = 1/m*eye(3);
Bk = zeros(18,4);
Bk(1:15,1:4) = B(1:15,1:4);
Ck = zeros(6,18);
Ck(1:3,1:3) = eye(3);
Ck(4:6,7:9) = eye(3);
Dk = zeros(6,4);
v = 0.001*ones(6,1);
Tn = 0.001;
W = 1000*eye(18); % Noise Matrixes
V = 10*eye(6);
% Computation of Kalman Gain
[R,P,E] = lqe(Ak,eye(18),Ck,W,V); % Kalman Gain
⛄ 运行结果
⛄ 参考文献

















 27
27

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









