



 文章研究了正六边形(蜂巢)栅格在路径规划中的应用,通过Matlab仿真对比传统栅格,发现六边形栅格能提供更优的障碍物描述和更短的路径长度,提高规划效率。
文章研究了正六边形(蜂巢)栅格在路径规划中的应用,通过Matlab仿真对比传统栅格,发现六边形栅格能提供更优的障碍物描述和更短的路径长度,提高规划效率。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
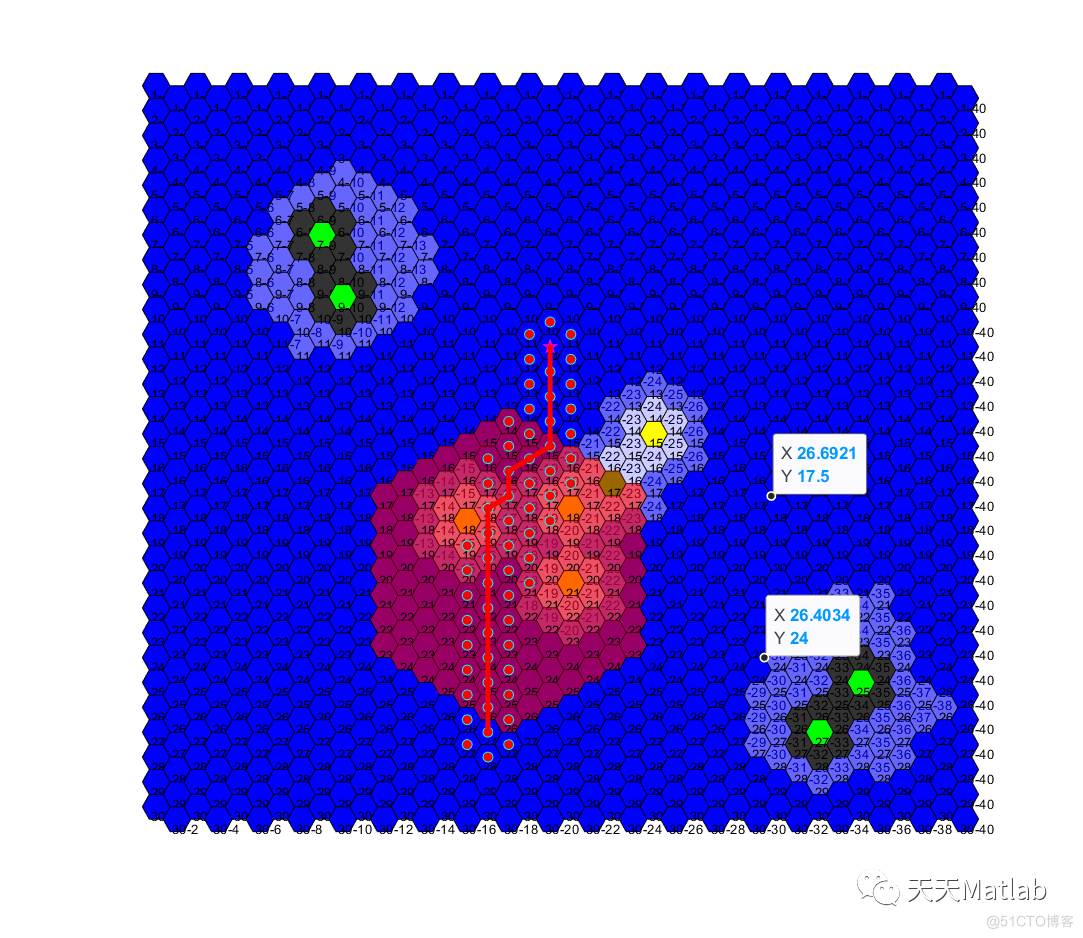
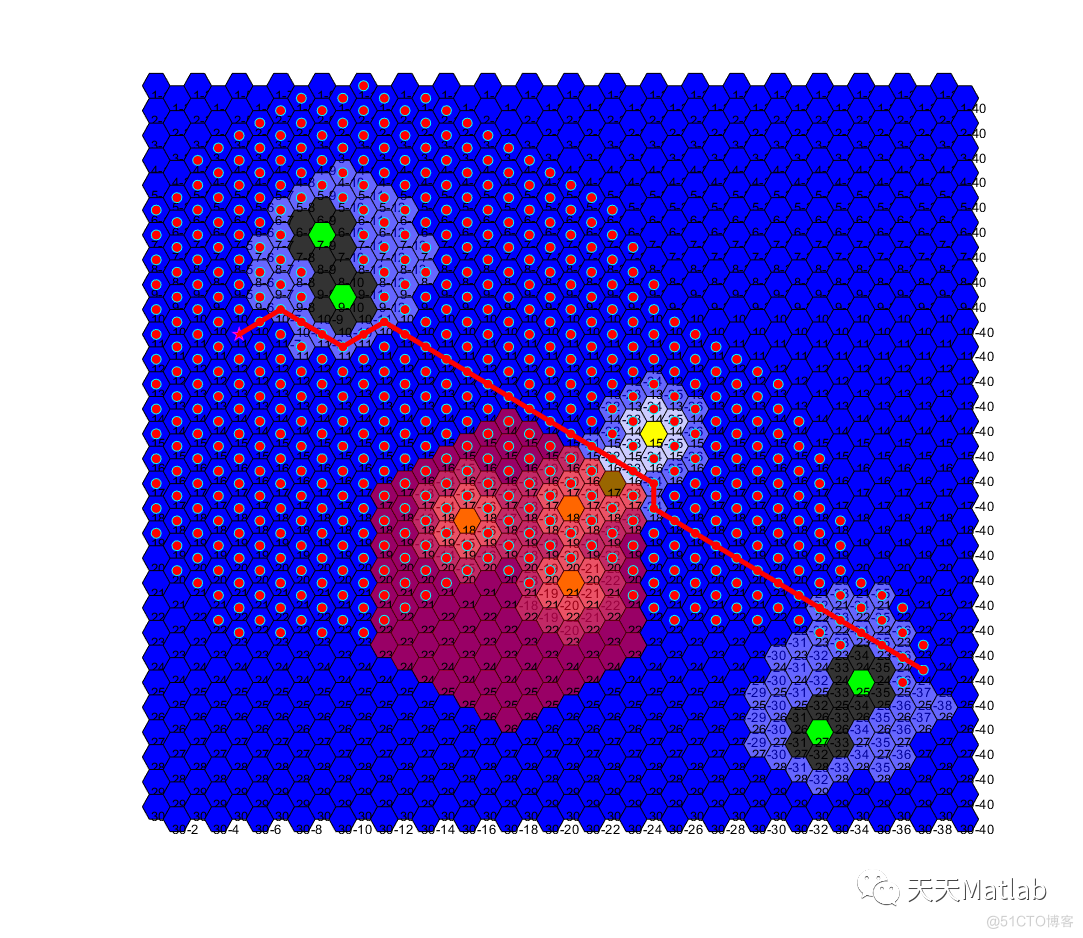
为了提高栅格地图中路径规划的质量和效率,研究了采用不同类型的栅格建立栅格地图的方法,并分析了在相同环境、相同路径规划算法的情况下,不同类型栅格对最终规划路径的影响.仿真结果表明,采用正六边形栅格(蜂巢栅格)的栅格地图相比于传统栅格的栅格地图,在障碍物信息描述方面更具有优势,规划出的路径长度最短,效率较高.
⛄ 部分代码
clc
clear
close all
load('data.mat')
model1=[0.1 0.5 1 0.8 1 1];
model2=[0.8 0.1 1 0.5 1 1];
w=[0.34 0.33 0.33];%总评价指数修正系数
select_n=2;%选择A或B棋子
if select_n==1
model=model1;
else
model=model2;
end
fai=0.8;%深海路径指数
figure(1)
hold on
axis([h_x(1,1)-1.1*l_six h_x(1,end)+1.1*l_six h_y(1,1)-1.1*l_six h_y(end,2)+1.1*l_six])
axis off
%% 设置图的大小和位置
set(gcf,'position',[200,10,650*col/row,750]);
yanse={'b','b','y','b','g','k'};%海域颜色
face_num=[1,0.6,1,0.2,1,0.8];%海域透明度
for i=1:row
for j=1:col
x=h_x(i,j)+l_six*cos(alphy);
y=h_y(i,j)+l_six*sin(alphy);
h=fill(x,y,yanse{h_data(i,j)});
set(h,'facealpha',face_num(h_data(i,j)))
if threaten_data(i,j)==1
h=fill(x,y,'r','edgealpha',0);
set(h,'facealpha',0.6)
end
text(h_x(i,j)-l_six/2.7,h_y(i,j)+l_six*0.6,[num2str(i),'-',num2str(j)],'FontSize',90/row)
end
end
⛄ 运行结果
⛄ 参考文献
[1] 黄浩乾, 沈寒伊, 唐家成,等. 基于六边形栅格地图的多AUV任务分配与路径规划方法:, CN111307153A[P]. 2020.
[2] 王文明, 杜佳璐. 基于正六边形栅格JPS算法的智能体路径规划[J]. 系统工程与电子技术, 2021(043-012).
[3] 关泉珍, 鲍泓, 史志坚. 基于A*算法的驾驶地图路径规划实现[J]. 北京联合大学学报, 2016, 30(2):9.
[4] 朱宝艳, 李彩虹, 宋莉,等. 基于栅格的可视图建模的移动机器人全局路径规划A*搜索算法[J]. 2017.
[5] 陶哲, 高跃飞, 郑天江,等. 基于A*算法在蜂巢栅格地图中的路径规划研究[J]. 中北大学学报:自然科学版, 2020, 41(4):8.

















 1074
1074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









