



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在当今无人机技术蓬勃发展的时代,无人机在众多领域展现出巨大潜力,如军事侦察、物流配送、环境监测以及灾难救援等。然而,无人机要安全、高效地完成任务,精准且优化的路径规划至关重要,特别是在复杂的二/三维环境中,面临诸多挑战,而人工蜂群(ABC)算法为解决这些难题提供了创新性思路。
一、二/三维复杂环境特性
二维环境下,无人机可能面临地形起伏、障碍物分布不均等情况,像在山区执行物资运输任务时,需避开山谷、山峰等自然障碍。三维环境更为复杂,除了地形因素,还涉及不同高度层的气流变化、建筑物及各类空中设施的立体阻拦,例如城市高楼林立区域的快递配送无人机,不仅要穿梭于高楼间隙,还得应对多变的高层风场。
二、人工蜂群算法原理
ABC 算法模拟蜜蜂群体的觅食行为。蜂群由雇佣蜂、观察蜂和侦察蜂组成:雇佣蜂负责在蜂巢附近探索蜜源,类比于在解空间中寻找较优路径解;观察蜂依据雇佣蜂分享的信息,选择有潜力的蜜源进一步探索,相当于对已有较好路径解进行优化筛选;侦察蜂在发现当前蜜源枯竭(即陷入局部最优解)时,随机地去开辟新路径,重新探索解空间,确保算法能跳出局部最优,持续寻找全局最优路径。
三、单无人机路径规划应用
1. 模型构建:将无人机在二维或三维空间中的位置、速度、姿态等状态参数作为变量,结合环境地图构建路径规划模型,目标是在满足避障等约束条件下,使路径长度最短、能耗最小或飞行时间最短等。 2. ABC 算法实施:初始化一群随机的“蜜源”,即无人机的初始路径方案,雇佣蜂开始对这些路径进行局部搜索,根据路径的适应度(如综合考虑飞行距离、能耗和安全系数后的评价值)调整路径;观察蜂根据雇佣蜂反馈,选择适应度高的路径深入优化;若遇到路径长时间无法改进,侦察蜂出动重新生成路径,如此迭代,直至找到满足预设条件的最优单无人机飞行路径。
四、多无人机路径规划协同要点
1. 冲突避免:多无人机同时作业时,极易出现飞行路径交叉、空域争抢等冲突,利用 ABC 算法规划时,需额外增加约束机制,如基于时间窗或空间分离的策略,确保无人机之间保持安全距离,避免碰撞。 2. 任务分配:不同无人机有不同性能与载荷,要依据任务需求合理分配,ABC 算法可在路径规划同时,结合任务特点,将复杂任务拆分成子任务并分配给合适无人机,实现整体效能最大化。 3. 信息共享:各无人机需实时共享自身位置、速度、任务进度等信息,以便协同调整路径,ABC 算法依赖此共享信息来动态优化群体飞行路径,让多无人机像蜂群一样高效协作。
五、面临的挑战与展望
尽管 ABC 算法在无人机路径规划上取得一定成效,但仍面临挑战。如在复杂动态环境下,算法的实时性需进一步提升以快速响应变化;面对大规模无人机群,计算复杂度会急剧上升,导致寻优效率降低。未来,随着硬件算力提升、算法改进融合,基于 ABC 算法的无人机路径规划有望实现更精准、高效的多场景应用,推动无人机产业迈向新高度。 综上所述,人工蜂群算法为单无人机及多无人机在复杂二/三维环境下的路径规划提供了有效手段,助力无人机更好地服务于各类实际任务。
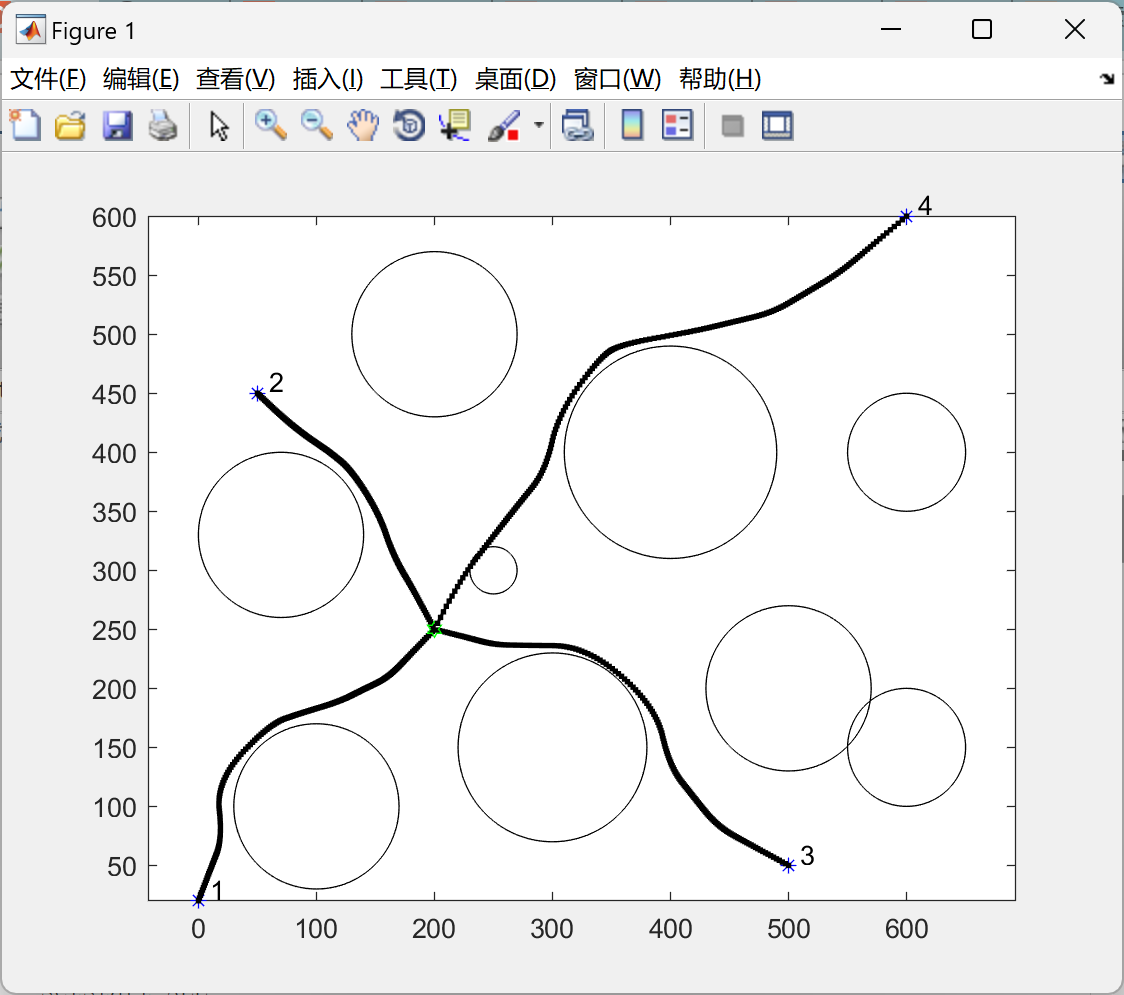
📚2 运行结果
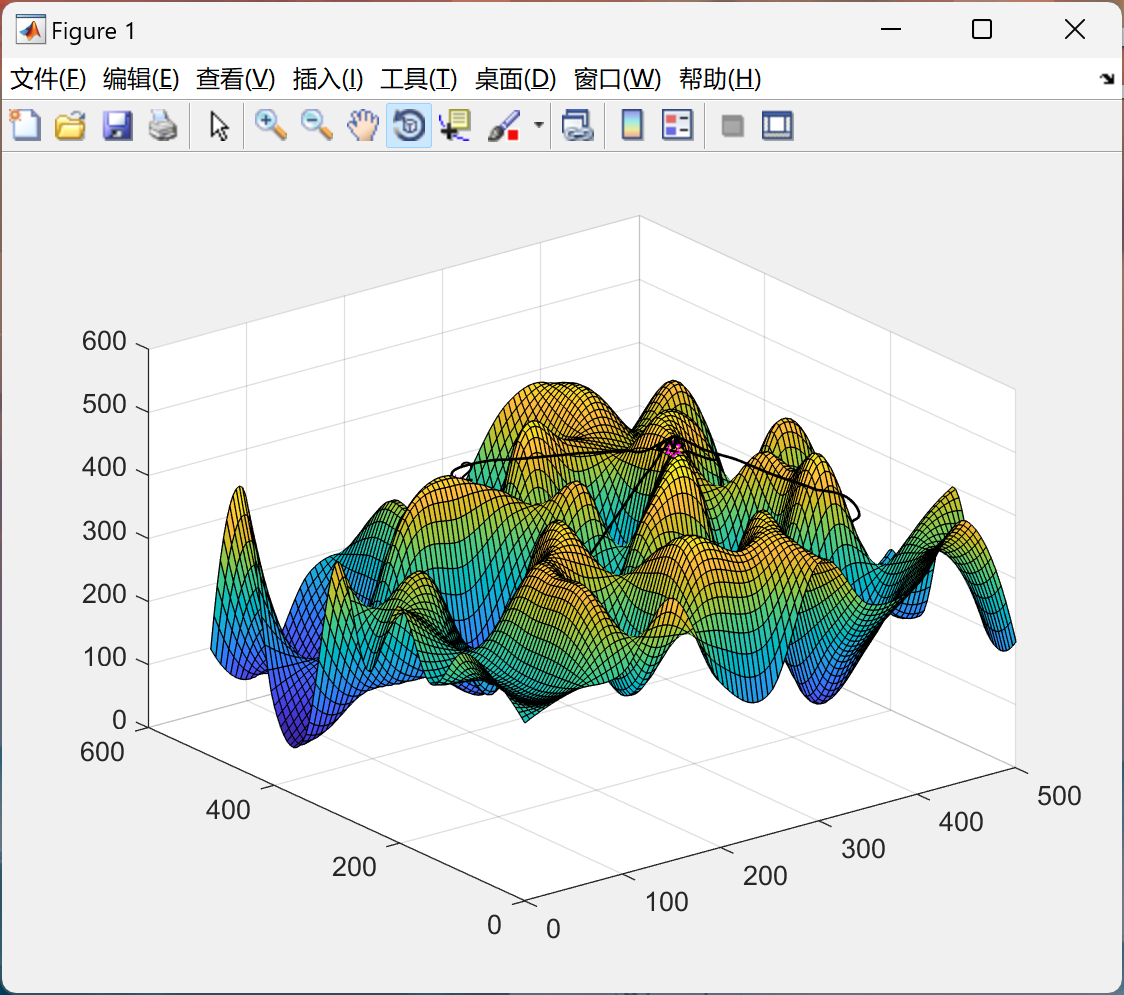
主函数部分代码:
clc
close all
clear all
global boundary setstart setfinal node danger_xi danger_yi danger_ri weight;
%================================参数设置=============================================%
%node=4;%离终点最近的起始点到终点的节点个数(偶数)
L_FEN=42;%设置节点间的间隔距离
danger_xi=[300 100 400 70 250 600 500 200 600];%设置威胁区域坐标
danger_yi=[150 100 400 330 300 150 200 500 400];
danger_ri=[80 70 90 70 20 50 70 70 50];%设置威胁半径
weight=[1 0.9];%路径长度、夹角所占权重
boundary=[700 0];%设置环境上下限
setfinal=[200 250];%设置终点
setstart_ALL=...
[0 20;
50 450;
500 50;
600 600];%设置起点,无人机自上而下依次编号为1、2、3.....
Vmin=3;%设置无人机飞行速度范围(m/s)
Vmax=30;
Ways=1;%Ways=1时,实现同时起飞,同时到达目标;Ways=2时,实现指定顺序依次到达目标
Order=[1 3 4 2];%无人机到达顺序
interval=5;%无人机到达间隔时间(s)
%===================================威胁区域绘图==========================================%
circle(danger_xi,danger_yi,danger_ri);
%===========================将每条路径的节点距离大致均匀化=================================%
lineX=size(setstart_ALL,1);%UAV数量
A=zeros(lineX,1);
for r=1:lineX
A(r)=sqrt(((setstart_ALL(r,:)-setfinal).^2)*ones(2,1));
end
node=floor(min(A)/L_FEN);
if mod(node,2)==1
node=node+1;
end
ind=find(A==min(A));
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈进朝,王洋,张营,等.基于时空密度聚类的异构无人机集群覆盖路径规划方法[J/OL].电子学报,1-11[2025-03-04].http://kns.cnki.net/kcms/detail/11.2087.TN.20250223.1642.002.html.
[2]屈博琛.基于深度学习自动微分的无人机路径规划[J].自动化与仪表,2025,40(02):66-72.DOI:10.19557/j.cnki.1001-9944.2025.02.015.
🌈4 Matlab代码实现



















 448
448

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









