



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、引言
路径规划是许多领域中的关键问题,例如机器人导航、自动驾驶、物流运输和无人机飞行等。ABC + PSO 路径规划是一种融合了人工蜂群算法(ABC)和粒子群优化算法(PSO)的创新型路径规划方法,旨在为各种应用场景提供更优的路径决策。
二、ABC 算法简介
人工蜂群算法(ABC)是一种模拟蜜蜂群体觅食行为的优化算法。在该算法中: 蜜蜂角色划分: 雇佣蜂:负责探索潜在的解空间,类似于寻找花丛的蜜蜂。它们会对当前解进行局部搜索,并将信息传递给观察蜂。 观察蜂:依据雇佣蜂提供的信息,按照一定的概率选择并更新最优解,从而优化搜索过程。侦察蜂:在搜索陷入局部最优时,侦察蜂会随机生成新的解,防止算法停滞,保证搜索的多样性和全局性。 算法优势: 全局搜索能力强,通过侦察蜂的随机搜索机制,能够探索搜索空间的不同区域,避免过早陷入局部最优解。具有较好的鲁棒性,对于不同类型的优化问题都能展现出一定的适应性。
三、PSO 算法简介
粒子群优化算法(PSO)模拟了鸟群或鱼群的社会行为,具体表现为: 粒子及其行为:每个粒子代表一个可能的解,具有位置和速度两个属性。粒子在搜索空间中运动,位置表示当前解,速度决定其运动方向和距离。粒子根据自身的历史最优位置(个体最优)和整个粒子群的历史最优位置(全局最优)更新自身的速度和位置,使其朝着最优解靠近。 算法优势: 收敛速度快,能够在较短的迭代次数内找到较优的解,适合对计算时间有限制的场景。 算法结构简单,易于实现和调整参数,对于简单到中等复杂程度的优化问题有良好的效果。
四、ABC + PSO 路径规划原理
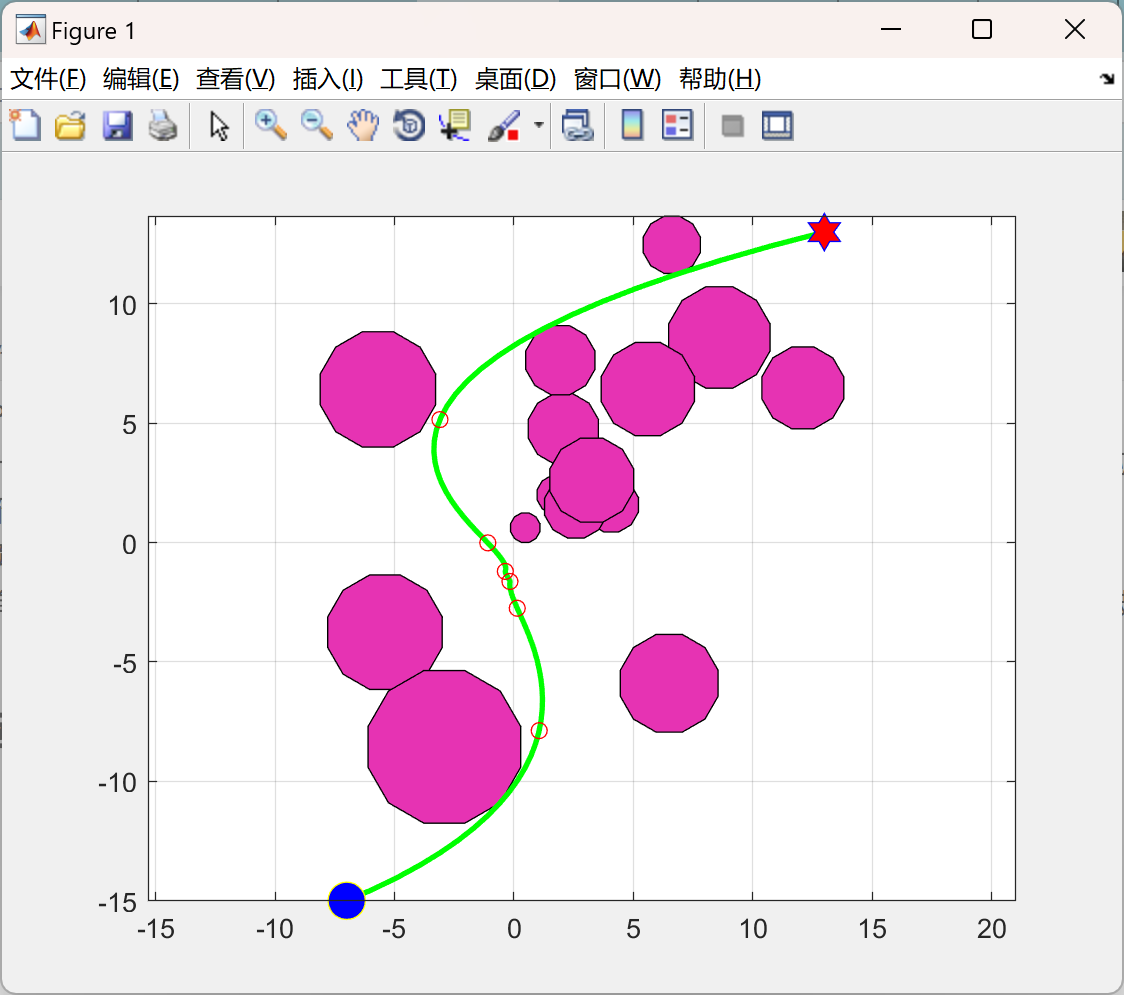
结合思路: 优势互补:ABC 算法的全局搜索能力和 PSO 算法的快速收敛特性相结合,在路径规划中可以实现更高效的优化。ABC 可以在广阔的解空间中广泛搜索,避免陷入局部最优;PSO 则可对已找到的较优区域进行快速精细搜索,加快找到最优路径的速度。 协同工作:两种算法可以并行或串行工作,并行时它们可同时对解空间进行探索和优化,相互提供信息;串行时可先使用 ABC 算法进行全局搜索,再用 PSO 算法进行局部优化,或者反之。应用场景:在复杂环境中,如机器人在障碍物密集的环境中寻找从起点到终点的路径,ABC + PSO 可以考虑到更多的路径可能性,避免局部陷阱,同时快速找到最优或接近最优的路径。在自动驾驶领域,能根据路况、交通规则和车辆性能,规划出最优的行驶路线,提高行驶效率和安全性。 对于物流配送,根据不同的配送点、交通状况和时间限制,规划出最经济、高效的运输路线。
五、结论
ABC + PSO 路径规划综合了人工蜂群算法和粒子群优化算法的优势,为解决复杂的路径规划问题提供了一种强大的工具。它在多种领域展现出巨大的潜力,不仅能提升路径规划的质量,还能适应不同的环境约束和性能要求。未来,随着算法的不断改进和参数调整,ABC + PSO 路径规划有望在更多领域得到广泛应用,为路径规划带来更加智能和高效的解决方案。 通过这种结合,我们可以克服单一算法的局限性,提高算法在复杂场景下的适应性和性能,为路径规划领域带来新的突破和发展,满足现代社会对智能路径规划日益增长的需求。
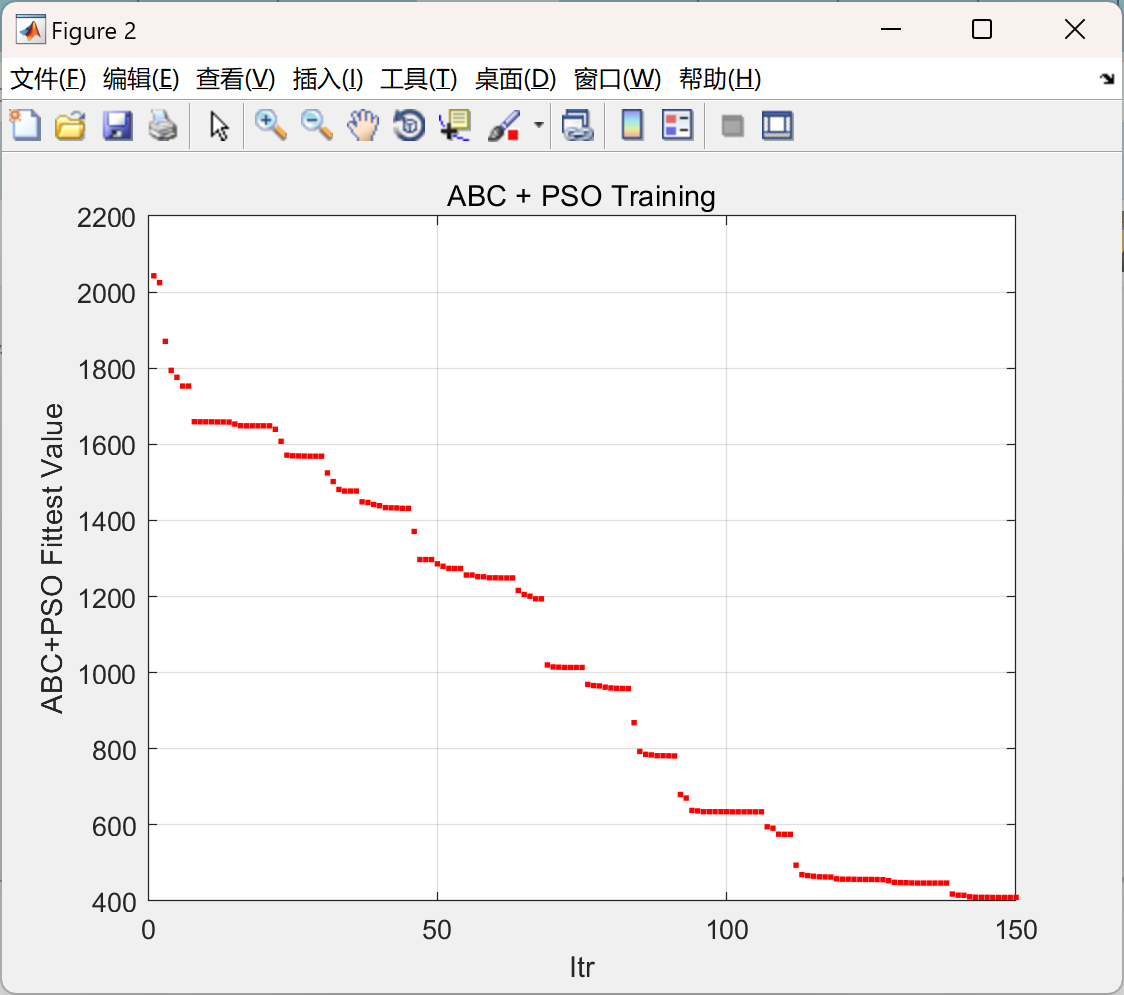
📚2 运行结果
主函数部分代码:
%% Cleaning The Stage
clc;
clear;
warning('off');
%% Start ABC + PSO Optimal Path Finder
model=Basics();
model.n=6; % number of Handle Points
CostFunction=@(x) Cost(x,model); % Cost Function
nVar=model.n; % Number of Decision Variables
VarSize=[1 nVar]; % Size of Decision Variables Matrix
VarMin.x=model.xmin; % Lower Bound of Variables
VarMax.x=model.xmax; % Upper Bound of Variables
VarMin.y=model.ymin; % Lower Bound of Variables
VarMax.y=model.ymax; % Upper Bound of Variables
%% PSO + ABC Parameters
MaxIt=150; % Maximum Number of Iterations
nPop=20; % Population Size (Swarm Size)
w=1; % Inertia Weight
wdamp=0.98; % Inertia Weight Damping Ratio
c1=1.5; % Personal Learning Coefficient
c2=1.5; % Global Learning Coefficient
nOnlooker = nPop; % Number of Onlooker Bees
L = round(0.6*nVar*nPop); % Abandonment Limit Parameter (Trial Limit)
a = 1;
alpha=0.1;
VelMax.x=alpha*(VarMax.x-VarMin.x); % Maximum Velocity
VelMin.x=-VelMax.x; % Minimum Velocity
VelMax.y=alpha*(VarMax.y-VarMin.y); % Maximum Velocity
VelMin.y=-VelMax.y; % Minimum Velocity
%% Initialization PSO + ABC
% Create Empty Particle Structure
empty_particle.Position=[];
empty_particle.Velocity=[];
empty_particle.Cost=[];
empty_particle.Sol=[];
empty_particle.Best.Position=[];
empty_particle.Best.Cost=[];
empty_particle.Best.Sol=[];
% Empty Bee Structure
empty_bee.Position = [];
empty_bee.Cost = [];
% Initialize Global Best
GlobalBest.Cost=inf;
% Initialize Population Array
pop = repmat(empty_bee, nPop, 1);
bee = repmat(empty_bee, nPop, 1);
% Initialize Best Solution Ever Found
BestSol.Cost = inf;
GlobalBest.Cost=inf;
% Create Particles Matrix
particle=repmat(empty_particle,nPop,1);
% Initialization Loop
for i=1:nPop
% Initialize Position
if i > 1
particle(i).Position=CRSolution(model);
else
% Straight line from source to destination
xx = linspace(model.xs, model.xt, model.n+2);
yy = linspace(model.ys, model.yt, model.n+2);
particle(i).Position.x = xx(2:end-1);
particle(i).Position.y = yy(2:end-1);
end
% Initialize Velocity
particle(i).Velocity.x=zeros(VarSize);
particle(i).Velocity.y=zeros(VarSize);
% Evaluation
[particle(i).Cost, particle(i).Sol]=CostFunction(particle(i).Position);
% Update Personal Best
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
particle(i).Best.Sol=particle(i).Sol;
% Update Global Best
if particle(i).Best.Cost<GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
% Initialization Loop
for i=1:nPop
% Initialize Position
if i > 1
pop(i).Position=CRSolution(model);
else
% Straight line from source to destination
xx = linspace(model.xs, model.xt, model.n+2);
yy = linspace(model.ys, model.yt, model.n+2);
pop(i).Position.x = xx(2:end-1);
pop(i).Position.y = yy(2:end-1);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]崔娟娟,梁晓珊,于秋爽.改进人工势场下的平面机器人路径规划[J/OL].机械设计与制造,1-7[2025-01-14].https://doi.org/10.19356/j.cnki.1001-3997.20241227.026.
[2]张得龙,张敏.改进PSO算法的物流配送路径规划方法[J].商洛学院学报,2024,38(06):39-44.DOI:10.13440/j.slxy.1674-0033.2024.06.008.
🌈4 Matlab代码实现


















 524
524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









