



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在灰度地图上搜索从 A 点到 B 点的最低成本路径,通常涉及到将图像处理技术与路径规划算法相结合。这种类型的路径规划问题常见于机器人导航、无人驾驶车辆等领域,其中灰度地图可以表示环境的不同特征,如地形难度、障碍物位置或移动成本等。
1. 灰度地图解释
灰度值:灰度地图中的每个像素点都有一个灰度值,这个值可以用来表示该位置的成本(例如,越亮的区域可能代表越高的成本)。
成本建模:通过定义规则,将灰度值转换为实际的运动成本,比如穿越某个区域所需的能量消耗、时间或者风险。
2. 地图预处理
二值化/阈值化:如果需要简化问题,可以将灰度地图转化为二值地图(黑白),其中白色像素表示可通行区域,黑色像素表示障碍物。
滤波和噪声去除:应用滤波器来平滑图像,减少不必要的细节和噪音,以提高路径搜索效率。
3. 路径搜索算法
A* (A-star) 算法:结合启发式估计与实际成本,快速找到一条从起点到终点的低成本路径。
Dijkstra 算法:保证找到最短路径,但计算量较大,适合用于小型或静态地图。
RRT (Rapidly-exploring Random Trees)** 和 PRM (Probabilistic Roadmap):适用于高维空间或复杂环境下的路径搜索。
4. 成本函数设计
启发式函数:对于像A*这样的算法,设计一个好的启发式函数可以帮助更快地找到近似解。这通常是基于欧几里得距离或其他形式的距离度量。
累积成本:随着路径延伸,累积路径上的所有成本,确保最终选择的是总成本最低的路径。
5. 实施步骤
1. 初始化:设置起始点 A 和目标点 B,并初始化开放列表(包含待探索节点)和关闭列表(已经探索过的节点)。
2. 迭代搜索:从起始点开始,按照选定的算法逐步扩展搜索范围,直到找到到达目标点 B 的路径或确定没有可行路径为止。
3. 路径优化:一旦找到初步路径,可以通过进一步优化减少路径长度或降低整体成本。
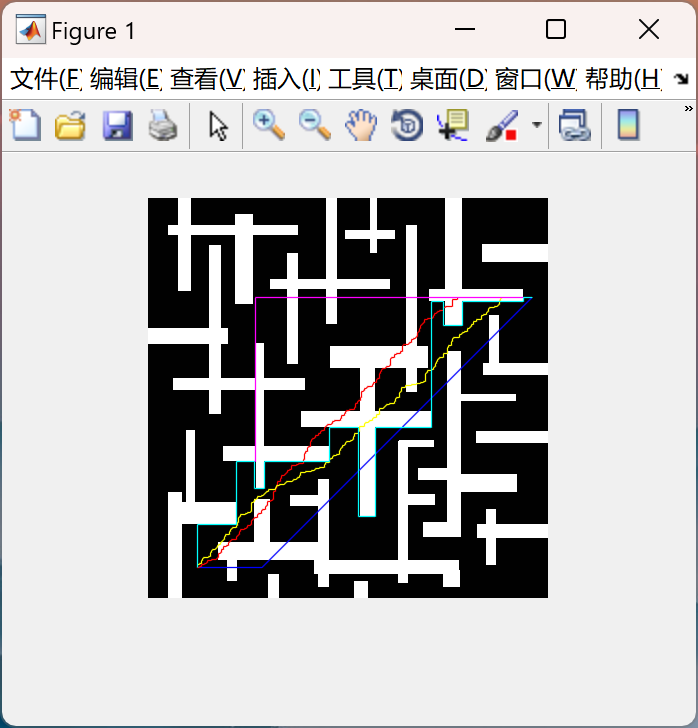
4. 结果输出:输出最终权重最小的路径,同时可以可视化路径在原始灰度地图上的表现。
6. 应用实例
在实际应用中,这种方法可以被应用于多种场景,如无人机航拍路线规划、自动导引车(AGV)路径选择以及虚拟角色在游戏世界中的智能导航等。通过上述步骤,可以在给定的灰度地图上有效地执行从 A 点到 B 点的最低成本路径搜索。重要的是要根据具体的应用需求调整算法参数和成本模型,以获得最佳性能。
📚2 运行结果
主函数部分代码:
clear all
close all;
clc
% Load a map
Map = MapPreparation('Maps/Map2.png');
Start =[50,370];
Goal = [385,100];
% Define a time limit
Time = 5;
TimeObtained = [];
% Start one of functions (straight line)
fprintf('\nTesting simple algorithm\n');
SolutionTimer = tic; % Start timer
VectSimple = A_SimpleAlgorithm(Map,Time,Start,Goal) ; % Start the algorithm
TimeObtained(1) = toc(SolutionTimer);
if(TimeObtained(1) > Time) % Check if time limit was exceeded
fprintf('Time exceeded\n');
else end
% Start second function (random algorithm)
fprintf('\nTesting random algorithm\n');
SolutionTimer = tic;
VectRandom = A_RandomAlgorithm(Map,Time,Start,Goal);
TimeObtained(2) = toc(SolutionTimer);
if(TimeObtained(2) > Time)
fprintf('Time exceeded\n');
else end
% Start third function (random algorithm that utilizes full time avilable)
fprintf('\nTesting random algorithm with time control\n');
SolutionTimer = tic;
VectRC = A_RandomControl(Map,Time,Start,Goal);
TimeObtained(3) = toc(SolutionTimer);
if(TimeObtained(3) > Time)
fprintf('Time exceeded\n');
else end
% Start fourth function (directed algorithm - choice of better option out of two)
fprintf('\nTesting directed algorithm\n');
SolutionTimer = tic;
VectDS = A_DirectedSimpleAlgorithm(Map,Time,Start,Goal);
TimeObtained(4) = toc(SolutionTimer);
if(TimeObtained(4) > Time)
fprintf('Time exceeded\n');
else end
% % Start fifth function (A lazy algorithm that generates simple trajectory
% % but in 10 seconds)
% fprintf('\nTesting lazy algorithm\n');
% SolutionTimer = tic;
% VectLazy = A_LazyAlgorithm(Map,Time,Start,Goal);
% TimeObtained(5) = toc(SolutionTimer);
% if(TimeObtained(5) > Time)
% fprintf('Time exceeded\n');
% else end
fprintf('\nTesting Krol_Mucha algorithm\n');
SolutionTimer = tic;
VectorOur = A_Krol_1(Map,Time,Start,Goal);
TimeObtained(5) = toc(SolutionTimer);
if(TimeObtained(5) > Time)
fprintf('Time exceeded\n');
else end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]朱易凡,裘旭冬,李硕.改进麻雀搜索算法的四旋翼无人机路径规划[J].传感器与微系统,2025,44(01):141-145+151.DOI:10.13873/J.1000-9787(2025)01-0141-05.
[2]宋云云,李兴鑫.PSO-RRT机器人可行路径搜索融合算法[J].智能计算机与应用,2025,15(01):165-170.DOI:10.20169/j.issn.2095-2163.24061804.
🌈4 Matlab代码实现


















 272
272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









